
国際特許分類[G01B21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | このサブクラスの他のグループの,個別の形式の測定手段に適合しない測定装置またはその細部 (1,964) | 表面の粗さまたは不規則性測定用 (236)
国際特許分類[G01B21/30]に分類される特許
1 - 10 / 236
真円度測定装置
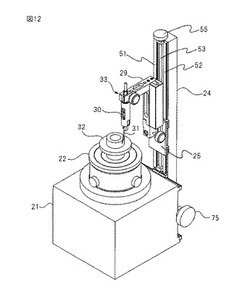
【課題】測定位置および方向を変える場合でも、検出器の取り付けを変更せずに検出器ホルダの取り付け方向のみを変更すればよく、測定点が測定平面からずれない真円度測定装置の実現。
【解決手段】ベース21と、載置されたワーク32を回転する回転台22と、回転台の回転軸に対して平行に伸び、回転台の回転軸とワークの測定点を含む測定平面に平行に移動可能なコラム24と、コラムに沿って移動可能に支持されたキャリッジ25と、キャリッジに取り付けられた検出器ホルダ29と、測定子31が測定平面で変位可能なように、検出器ホルダに取り付けられた検出器30と、を有し、検出器ホルダは、測定平面に垂直な回転軸を中心とした異なる回転位置でキャリッジに取り付け可能で、異なる回転位置に取り付けても測定子が測定平面で変位可能な状態が維持される真円度測定装置。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
反射型マスクの製造方法および半導体集積回路装置の製造方法
【課題】波長が13.5nm付近の極端紫外(Extreme Ultra Violet:EUV)光を露光光源とする反射型マスクの欠陥修正技術を利用した半導体集積回路装置の製造技術を提供する。
【解決手段】位相欠陥211が生じている開口パターン204の近傍の吸収層203に、開口パターン204よりも微細な開口径を有する補助パターン301を形成する。この補助パターン301は、ウエハ上のフォトレジスト膜に開口パターン204を転写する際の露光光量を調整するためのパターンである。
(もっと読む)
表面粗さ測定装置
【課題】細管などの狭い部分の奥深くにまでスタイラスを挿入することができるように小型化することが可能な測定部を備えた表面粗さ測定装置を提供する。
【解決手段】表面粗さ測定装置10は、材料表面90に接触する触針128を有するスタイラス120と、スタイラス120を材料表面90に並行に対して走査するキャリッジ110と、スタイラス120に設けられ、触針128の上下動に応じて上下動する光反射部材130であって、該上下動の方向に湾曲した反射面を有する光反射部材130と、第1端面142が光反射部材130の反射面に面するように第1端部142がキャリッジ110に固定された細長い導光部材140であって、第2端面144から入射された光を第1端面142まで導き該第1端面142から出射して反射面に照射し、反射面で反射して第1端面142に入射する反射光を第2端面144まで導く導光部材140と、を備えている。
(もっと読む)
路面凹凸評価システム
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
長尺体の直線度の経時変化を把握する方法、システム
【課題】長尺体の直線度の経時変化を把握する方法およびシステムを提供すること。
【解決手段】長尺体の直線度の経時変化を把握する方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S3)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S4)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S5)と、定期的に前記移動体を移動させ、その都度前記情報処理部が前記情報処理し、該情報処理した結果の経時変化を、記憶部が記憶する記憶工程(S6)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度を測定する測定方法、携帯型測定用キット
【課題】長尺体の直線度を容易に測定することを考慮した方法を提供すること。
【解決手段】長尺体の直線度を測定する測定方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S2)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S3)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S4)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度測定装置、長尺体の直線度測定方法
【課題】長尺体の直線度を容易に測定することを考慮した直線度測定装置を提供すること。
【解決手段】長尺体13の直線度測定装置1は、第1直線ガイド部材2と、第2直線ガイド部材3と、移動体4と、角速度センサー(5)と、情報処理部10と、測定対象の長尺体13と前記第2直線ガイド部材3とが一つの直線軸を形成するように、前記測定対象の長尺体13を取り付け可能な取り付け部11と、を備え、前記移動体4が、前記第1直線ガイド部材2と前記長尺体13とにガイドされて一の方向へ移動し、前記移動体4が移動している間の前記角速度センサー(5)の姿勢の変化の情報と前記長尺体13における移動中の前記角速度センサー(5)の位置との関係を、前記情報処理部10が関連づけして情報処理することにより前記長尺体13の直線度を測定する構成であることを特徴とする。
(もっと読む)
物品の表面性状判定方法
【課題】 物品の表面の筋目の存在を容易かつ精度良く判定できるようにする。
【解決手段】 第1工程で、物品の表面の位置に対する高さの関係を示す第1の曲線(粗さ曲線)を相互に平行な複数の測定ラインに沿って測定し、第2工程で、第1の曲線をフーリエ変換することで物品の表面の凹凸の周波数に対する振幅の関係を示す第2の曲線に変換し、第3工程で、複数の第2の曲線のピークの重なり状態に基づいて物品の表面に測定ラインに交差する方向の筋目が存在するか否かを判定するので、複数の測定ラインに沿って第1の曲線を求める始点位置がずれても筋目の存在を確実に判定することができ、しかも第2の曲線のピークの高さから筋目の深さあるいは高さを求めることができる。
(もっと読む)
表面性状測定機
【課題】測定時間の短縮が図れる表面性状測定機を提供する。
【解決手段】被測定物Wを載置する回転テーブル20と、被測定物の表面性状に応じた信号を発する検出手段30と、回転テーブルおよび検出手段を相対移動させる検出器駆動機構40と、検出手段からの信号を取り込み、この取り込んだ信号を処理して被測定物の形状や表面粗さなどの表面性状を求める処理装置60とを備える。検出手段は、複数の検出器31,32を含んで構成される。処理装置60は、複数の検出器31,32からの信号を順番に取り込んで処理する。
(もっと読む)
1 - 10 / 236
[ Back to top ]