
国際特許分類[G01B21/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | このサブクラスの他のグループの,個別の形式の測定手段に適合しない測定装置またはその細部 (1,964)
国際特許分類[G01B21/00]の下位に属する分類
長さ,幅または厚さの測定用 (236)
直径測定用 (41)
離隔対象物間の距離または間隙測定用 (35)
深さ測定用 (5)
輪郭または曲率測定用,例.プロフィル測定 (409)
角度またはテーパ測定用;軸の心合せ検査用 (255)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (236)
固体の変形測定用 (88)
国際特許分類[G01B21/00]に分類される特許
11 - 20 / 654
スティックスリップ検出装置および検出方法
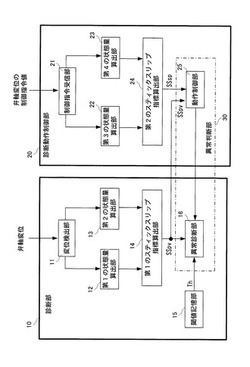
【課題】スティックスリップの誤検出を高精度で抑制する。
【解決手段】弁軸変位より第1の状態量と第2の状態量とを算出し、第1のスティックスリップ指標算出部14において、第1の状態量と第2の状態量との比を第1のスティックスリップ指標SSpvとして求める。弁軸変位の制御指令値より第3の状態量と第4の状態量とを算出し、第2のスティックスリップ指標算出部24において、第3の状態量と第4の状態量との比を第2のスティックスリップ指標SSspとして求める。異常判断部30において、閾値をTh、第1の定数をα、第2の定数をβとし、「SSpv> Th AND SSpv>α・SSsp+β」を満足した場合に、スティックスリップが発生した判断する。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
回転部品の動作を監視する際に使用するためのシステムおよび方法
【課題】ロータアセンブリの動作を監視する際に使用するためのシステムを提供する。
【解決手段】ロックワイヤタブ220の表面242、252間の距離を測定するように構成された少なくとも第1の隙間センサ240、250を含む複数の隙間センサと、複数の隙間センサに接続された監視ユニットとを含み、監視ユニットは、複数の隙間センサ240、250からの測定値を受信し、受信された測定値に基づいてロータアセンブリに亀裂が存在するかどうかを判定するように構成されている。
(もっと読む)
多点検査装置と方法
【課題】単孔用ツールと複孔用ツールを併用し、多数の箇所を最短時間又はこれに近い短時間で検査することができる多点検査装置と方法を提供する。
【解決手段】単孔用ツール14aと、複孔用ツール14bと、ツールのいずれかを孔2に対して位置決めする位置決め装置12と、各孔2の中心位置と干渉物4の位置とを記憶する記憶装置18とを備える。(A)各孔2の中心位置と干渉物位置を表示し、(B)指定した孔2の検査順が干渉物位置を通過する場合に、その前後を別の列として扱い、(C)検査順の各列に含まれる孔数mが、複孔用ツール14bで同時に検査する孔数kより小さい場合に、単孔用ツール14aの使用と、検査順に基づく孔2の順を決定し、(D)m≧kの場合に、複孔用ツール14bの使用と、検査順に基づくk個毎の孔2の順を決定し、かつkより少ない最後の1又は複数の孔を複孔用ツール14bで同時に検査する孔を決定する。
(もっと読む)
三次元測定装置
【課題】単純な機構を用いて、単一の動力装置により稼働することで、小型で汎用性が高く、死角や遅延を抑制することができる三次元走査機構を提供する。
【解決手段】動力装置からの動力が下部フランジ6,10に伝達されることで、当該下部フランジ6,10がスタッドボルト4の周囲を軸回りに回転し、当該下部フランジ6,10の軸回りの回転力がリンク機構1,5を介して上部フランジ2,3に伝達されることで当該上部フランジ2,3はスタッドボルト4の外周面を軸回りに螺旋状に回転しながら上下方向に移動可能な構成となっている。
(もっと読む)
路面凹凸評価システム
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
有関節座標計測機再配置方法
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現する有関節座標計測機再配置方法を提供する。
【解決手段】本システム100では有関節座標計測機(CMM)200及びレーザトラッカ400を使用し、そのCMM200上にはレーザトラッカ400と対をなすレトロリフレクタを配置する。共通の基準座標系による座標値にCMM200による計測値及びレーザトラッカ400による計測値を変換できるためCMM200を移動させることができる。更に、レーザトラッカ400では計測できない隠れ点を有関節CMM200等で計測することができる。
(もっと読む)
複数の設備の相対位置を監視するデバイス
【課題】共通基準システム(4)上に振動隔離機構(2、3、5)を介して搭載され、該共通基準システムに対して変動する位置をとる、リソグラフィ・デバイス(1)及びワークステーション・デバイス(6)を含む装置において、両デバイス間の相対位置の変動を監視して該装置が誤動作しないように調整する。
【解決手段】前記共通基準システムに対する前記リソグラフィ・デバイス及び前記ワークステーション・デバイスの個々の位置を測定する手段と、測定された両デバイスの個々の位置から算出される両デバイス間の相対位置(d、7b)が所定の公差範囲内(7a−7c)にあるかどうかを評価する手段を含む装置。
(もっと読む)
角型電池の外形測定装置
【課題】測定値のばらつきが小さく精度の良い角型電池の外形測定装置を得る。
【解決手段】電池7の垂直方向の外周面を把持しかつ7の水平方向の位置決めを行い、かつ電池姿勢を垂直に位置決めする側面位置決め機構22と、7の水平方向の外周面に当設可能であって7の水平面の垂直方向の位置決めをする水平面位置決め機構23と、搬送治具8に7を載置面から切り離す手段20を備え、7の垂直方向の外形を測定する際に、22により7の水平方向の位置決めと姿勢を垂直に位置決めし、かつ20により載置面から7を切り離した状態で、垂直方向外形測定手段12により7の垂直方向の外形を測定し、7の水平方向の外形を測定する際に、23により7の垂直方向の位置決めをし、かつ20により載置面から7を切り離した状態で、水平方向外形測定手段13により7の水平方向の外形を測定する角型電池の外形測定装置。
(もっと読む)
11 - 20 / 654
[ Back to top ]