
国際特許分類[G01C19/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | ジャイロスコープ;振動質量を持つ回転感応装置;可動質量を持たない回転感応装置 (2,276)
国際特許分類[G01C19/00]の下位に属する分類
回転体ジャイロスコープ (70)
振動質量,例.音叉,をもつ回転感応装置 (1,622)
可動質量をもたない回転感応装置 (220)
国際特許分類[G01C19/00]に分類される特許
41 - 50 / 364
ゲームプログラム、ゲーム装置、ゲームシステムおよびゲーム方法
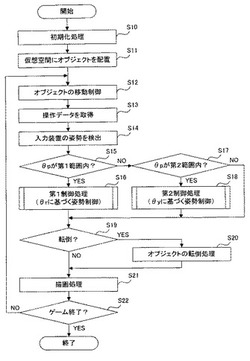
【課題】入力装置の姿勢に基づいて実行されるゲームにおいて、操作性を向上させること。
【解決手段】入力装置のジャイロセンサユニットから出力される角速度データに基づいて入力装置の姿勢(ピッチ角、ロール角、ヨー角)が検出される。そして、ピッチ角が第1範囲内か第2範囲内かが判断され、ピッチ角が第1範囲内である場合にはロール角に応じてオブジェクトの姿勢が更新され、ピッチ角が第2範囲内である場合にはヨー角に応じてオブジェクトの姿勢が更新される。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法

【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
モーション検知システム、モーション検知可能な携帯型装置、及びモーション検知システムの動作方法
【課題】ハードウェア費用を増大させることなく、3つの軸のいずれの軸についてもその軸の周りの回転を決定することができるモーション検知システム等を提供する。
【解決手段】モーション検知システムは携帯型装置及び受信器装置を有する。携帯型装置はマイクロコントローラ、Gセンサ(1つの3軸加速度計)、ただ1つの2軸ジャイロスコープ、及び無線送信器を有する。受信器装置は、望ましくはドングルであり、マイクロコントローラ及び無線受信器を有する。2軸ジャイロスコープの第1の軸は携帯型装置のZ軸と平行であり、2軸ジャイロスコープの第2の軸は携帯型装置のX軸と鋭角αを形成する。鋭角αは、受信器装置のマイクロコントローラが、携帯型装置の3つの軸の夫々の周りの回転データを計算することを可能にする。
(もっと読む)
角速度検出装置
【課題】センサ部と検出部とを電気的に接続する接続手段の駆動信号伝達線が断線しているか否かを判定することができる角速度検出装置を提供する。
【解決手段】C/V変換回路23は、可動電極に搬送波信号Vsが印加され、固定電極に駆動信号Vsv+、Vsv-が印加されるコンデンサCs1〜Cs4の静電容量を変換した電圧Vcvを出力する。判定ロジック25は、コンパレータ24を通じて電圧Vcvをレベル変換した電圧Vcmpに基づいて、サーボ制御を行うための駆動信号Vsv+、Vsv-を回路チップ3側からセンサチップ2側に伝達する接続ラインL1〜L4の断線を判定する。
(もっと読む)
方向検出装置及びこれを用いたゲームシステム
【課題】地磁気センサを利用した補正を適切に行うことが可能な方向検出装置を提供する。
【解決手段】本体部としての筐体2とその筐体2に対して方向が変化する可動部としての3Dグラス3とを有するゲーム機1に適用される方向検出装置において、筐体2に設置される固定側地磁気センサ18と、3Dグラス3に設置されるジャイロセンサ15と、3Dグラス3に設置される可動側地磁気センサ17とを設け、ジャイロセンサ15の出力に基づいて、3Dグラス3の筐体2に対する方向を判別し、固定側地磁気センサ18及び可動側地磁気センサ17のそれぞれの出力に基づいて、ジャイロセンサ15の出力に基づいて判別した方向を補正する。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
MEMSセンサ・パッケージ
【課題】センサを密封する、MEMSセンサ・パッケージを提供する。
【解決手段】MEMSセンサ・パッケージは、MEMSセンサと、第1のリーク・レートでガスリークに浸透するセンサボディと、埋め戻し圧力までセンサボディに加圧する埋め戻しガスと、を有し、埋め戻し圧力は、MEMSセンサの減衰を提供し、埋め戻し圧力は、ガスリークのためのセンサボディ内の圧力の増加が、MEMSセンサ・パッケージに関する少なくとも特定の設計サービス寿命に関する所定の範囲を越えて、MEMSセンサのQ値の偏差に生じさせないようにセットされる。
(もっと読む)
慣性航法装置
【課題】方位角の初期化誤差を小さくする。
【解決手段】ジャイロ11と、外部INS20の検出角速度とジャイロ11の検出角速度を用い、外部INS20に対する取付けミスアライメントを推定する角速度マッチング部41と、外部INS20が出力するロール角、ピッチ角及び方位角とジャイロ11の検出角速度を用い、外部INS20に対する取付けミスアライメントを推定する角度マッチング部42と、慣性航法装置の姿勢角を求める姿勢角演算部と、姿勢角の変動から求められる動揺レベルにより角速度マッチング41で推定される取付けミスアライメント、角度マッチング部42で推定される取付けミスアライメント及び取付けミスアライメントの推定値がゼロのうち、いずれかを選択して出力する選択部43と、外部INS20から入力される方位角を選択部43の出力によって補正する補正演算部14とを備える。
(もっと読む)
姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラム
【課題】3次元の姿勢角を求めるための計算を効率よく行うことができ、演算時間を短縮でき、かつ演算速度を向上することができる姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラムを提供する。
【解決手段】姿勢制御装置は、状態フィードバックを用いて移動体の姿勢の推定を行う。この姿勢制御装置は、姿勢及び姿勢変化率が入力され、これらを四元数に変換する入力部101と、四元数に変換された姿勢及び姿勢変化率を使用してフィルタ演算するフィルタ演算部102と、フィルタ演算により得られた姿勢に基づき移動体の姿勢制御を行う姿勢制御部104とを有し、フィルタ演算部102は、姿勢の推定を行うためのフィルタ演算に球面線形補間を使用する。
(もっと読む)
校正データ取得方法、ジャイロセンサー出力補正方法及び校正データ取得システム
【課題】ミスアライメント誤差を考慮しつつ、慣性センサーの温度特性を適切に求めるための新たな手法を提案すること。
【解決手段】試験システム1において、ジャイロセンサー520を具備するセンサーモジュール5の特性判定処理が行われる。すなわち、試験装置3において、絶対軸が定められた被検体固定装置340に、ジャイロセンサー520の検出軸の方向を絶対軸方向とするようにセンサーモジュール5が固定される。そして、センサーモジュール5の姿勢及び恒温槽320内部の温度を変化させながら、ジャイロセンサー520の出力値を記録するデータ取得処理が行われる。そして、記録されたジャイロセンサー520の出力値を用いて、補正係数算出装置2により温度依存成分の温度係数及びミスアライメント係数が補正係数として算出される。
(もっと読む)
41 - 50 / 364
[ Back to top ]