
国際特許分類[G01C19/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | ジャイロスコープ;振動質量を持つ回転感応装置;可動質量を持たない回転感応装置 (2,276)
国際特許分類[G01C19/00]の下位に属する分類
回転体ジャイロスコープ (70)
振動質量,例.音叉,をもつ回転感応装置 (1,622)
可動質量をもたない回転感応装置 (220)
国際特許分類[G01C19/00]に分類される特許
21 - 30 / 364
旋回検出装置、端末装置及びプログラム
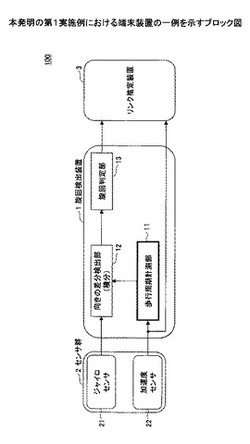
【課題】旋回検出装置、端末装置及びプログラムにおいて、ユーザが携帯する端末装置に適用した場合でも正確な旋回動作の検出を可能とすることを目的とする。
【解決手段】旋回検出装置は、ユーザに携帯される端末装置の加速度から偶数歩に相当する歩行周期を計測し、端末装置の角速度を歩行周期に応じた積分区間で時間積分することで、基準面に対する角度を示す現在の向きと歩行周期に相当する時間だけ前の向きとの差分を検出し、前記差分に基づいて端末装置の旋回を判定するように構成する。
(もっと読む)
検出装置、カメラ及び電子機器

【課題】クロック信号の周波数と同じ周波数の外乱が発生した場合でも被測定対象の変位の検出が可能な検出装置、カメラ及び電子機器を提供する。
【解決手段】検出装置331は、第1〜3のクロック信号を出力するCLK発生器101と、変位を検出して、検出した変位の位相と第1のクロック信号の位相との差を示す位相差信号を出力するセンサ103と、センサ103から出力された位相差信号と、第2のクロック信号とを混合するミキサ部106と、ミキサ部106から出力された信号が入力されるバンドパスフィルタ107と、バンドパスフィルタ107から出力された信号を、第3のクロック信号の周波数に基づいてサンプリングしてディジタル信号に変換するアナログ/ディジタル変換部(ADC109)と、第2のクロック信号のスペクトルを拡散させてミキサ部106に入力させるスペクトラム拡散部(SSCG104)と、を備える。
(もっと読む)
キャリブレーション装置、キャリブレーション方法、及び電子機器の製造方法
【課題】一定の回転速度での回転制御を実現可能なモーターの数をセンサが回転速度を検出する基準軸の数よりも減らしつつ、複数の基準軸のそれぞれを回転中心として電子機器を一定速度で回転させることのできるセンサのキャリブレーション装置を提供する。
【解決手段】電子機器2が固定されるホルダーと、第1回転軸を中心としてホルダーを回転させる第1モーターと、第1回転軸と直交する第2回転軸を中心としてホルダーを回転させる第2モーターと、ホルダーの第2回転軸回りの回転位置を、基準位置と、当該基準位置から90度回転した直交位置と、の間に制限するストッパーと、を備え、第1モーターは、電子機器2が固定されたホルダーの第2回転軸回りの回転位置が、基準位置にある状態、及び直交位置にある状態のそれぞれにおいて、ホルダーを所定の回転速度で回転させるキャリブレーション装置である。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】短期間であっても角速度の導出精度を向上させる技術を提供する。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
ジンバル駆動装置
【課題】本発明は、保持体及び第1枠体の外面にディンプルを形成することによって空気抵抗を低減させると共に、保持体及び第1枠体の回動時のモータの駆動電流を抑制することを目的とする。
【解決手段】本発明によるジンバル駆動装置は、支持台(4)に回動自在に設けられた保持体(17)と、この保持体(17)の内側に設けられピッチ方向(B)に沿って回動自在とした第1枠体(20)と、前記第1枠体(20)内に設けられた1個又は複数のカメラ(2,28)とを備え、前記保持体(17)及び第1枠体(20)の外面(17a,20a)にはディンプル(40)が形成されている構成である。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】短期間であっても角速度の導出精度を向上させる技術を提供する。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
物理量検出装置、ネットワークシステム
【課題】センサ検出結果を送信するための通信負荷を軽減するとともに、センサ検出結果を受信する受信装置の処理負荷を軽減することのできる、物理量検出装置を提供することを目的とする。
【解決手段】本発明に係る物理量検出装置は、センサが正常に稼動していない場合にはセンサの検出結果を送信せずにその診断結果を送信する。
(もっと読む)
産業用ロボットの速度位置解析システム及び産業用ロボットの速度位置検出装置
【課題】従来の産業用ロボットの速度位置解析システムは、ドリフト安定度の高い慣性センサからの慣性信号に基づいて産業用ロボットの位置等を検出するように構成しているので、高価な慣性センサが必要となり、部品コストの増大の要因になっている。
【解決手段】本発明による産業用ロボットの速度位置解析システムでは、移動制御部20は、産業用ロボット1を静止させているときにデータ蓄積部30に対して静止情報20aを入力する。データ蓄積部30は、静止情報20aを検出したときの慣性信号11aのデータに関連付けて静止情報20aを記憶する。速度位置後解析部31は、静止情報20aが関連付けられている慣性信号11aのデータに基づいて求められる産業用ロボット1の速度をゼロとする補正値を求めて、求めた補正値を用いて慣性信号11aのデータを補正して産業用ロボット1の速度及び位置を求める。
(もっと読む)
運転支援システム
【課題】車両間通信により車両の位置情報に基づいて、他車に対する自車の走行についての運転支援情報を提供する運転支援システムにおいて、運転支援情報の誤提供の防止を図る。
【解決手段】自車と他車との間で離間距離が所定以下の場合に、前記自車及び他車間で少なくとも位置情報の送受信を行い、当該位置情報に基づいて他車に対する自車の走行の運転支援情報を提供する運転支援システムにおいて、前記自車の走行領域に応じて前記運転支援情報の提供度合いを段階的に変化させる運転支援レベル判定部14と、前記位置情報の誤差が所定以上となる領域を予め地図情報に合わせて記憶する誤差発生領域記憶部16,92とを備え、前記位置情報の誤差が所定以上となる領域に自車が存在する場合は、前記運転支援情報の提供度合いを制限する。
(もっと読む)
制御装置及び移動体
【課題】外力に応じて走行する移動体において、操舵桿グリップの回転とは異なる方法で旋回動作を実現すること。
【解決手段】外力に応じて走行する移動体であって、車体が回転する際の角速度を検出する角速度センサによって検出された角速度に応じて、前記移動体の駆動部の動作を制御する制御器を備える。さらには、前記移動体の移動速度を演算する速度演算器と、前記速度演算器によって演算された前記移動速度に応じて、前記制御器における制御の係数を変更する制御係数変更器と、をさらに備え、前記制御器は、前記制御係数変更器によって変更された係数に基づいて前記駆動部の動作を制御しても良い。
(もっと読む)
21 - 30 / 364
[ Back to top ]