
国際特許分類[G01C19/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | ジャイロスコープ;振動質量を持つ回転感応装置;可動質量を持たない回転感応装置 (2,276)
国際特許分類[G01C19/00]の下位に属する分類
回転体ジャイロスコープ (70)
振動質量,例.音叉,をもつ回転感応装置 (1,622)
可動質量をもたない回転感応装置 (220)
国際特許分類[G01C19/00]に分類される特許
61 - 70 / 364
移動体搭載用機器
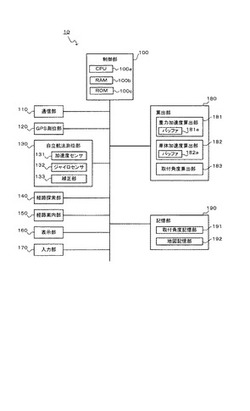
【課題】移動体への取り付け状態によらず、移動体の移動により移動体の或る軸回りに角速度が発生した場合に、その軸とは異なる軸回りの角速度を精度良く得ることが可能となる移動体搭載用機器を提供する。
【解決手段】重力加速度算出部181が出力する重力加速度と、車体加速度算出部182が出力する車体加速度とに基づき、ジャイロセンサ132のピッチ軸と車体の鉛直軸とのなす角度を算出する取り付け角度算出部183と、ジャイロセンサ132が検出するヨー軸回りの角速度と、取り付け角度算出部183が算出した角度とに基づき、ジャイロセンサ132が検出するピッチ軸回りの角速度に含まれる不要成分を算出し、ジャイロセンサ132が検出するピッチ軸回りの角速度から、算出された不要成分を減算する補正部133と、を備える構成とした。
(もっと読む)
センサ補正プログラム、センサ補正装置およびセンサ補正方法

【課題】地磁気センサとジャイロセンサの検出値に含まれるオフセット誤差を正確に補正すること。
【解決手段】センサ補正装置100は、センサ装置110が検出した検出値を取得すると、まず、移動体130の走行状態から、地磁気センサ111とジャイロセンサ112とのうち、より正確な検出値が出力されるセンサを判断する(ステップS1)。そして、より正確なセンサの検出値を利用して、もう一方のセンサ(ステップS1において、より正確なセンサと判断されなかったセンサ)のセンサの検出値を補正する(ステップS2)。センサ補正装置100は、ステップS2の補正が終了すると、より正確なセンサの検出値と、補正された検出値とを方位検出装置120に出力して(ステップS3)、一連のセンサ補正処理を終了する。
(もっと読む)
回転角度センサの校正方法
【課題】高い精度レベルで且つ複雑さを相当に少なくした、回転角度センサの校正方法の提供。
【解決手段】走査手段14は、回転子12の測度体を走査し、回転子12の回転角度位置に関連する実測角度値を発生させる。レーザジャイロスコープ18は、シャフト10の角速度を測定する。シャフト10の角速度に依存するレーザジャイロスコープ18からの信号が、回転角度に関して時間で積分され、基準角度値を得る。走査手段14からの実測角度値はこれらの基準角度値と比較され、その差から、実測角度値の各々に関連する修正変数が形成される。実測角度値及び実測角度値それぞれの関連する修正変数は、修正テーブルの形態で不揮発性メモリに保存される。回転角度の測定の間、実測角度値は、実測角度値の各々に関連する修正変数を用いて修正され、修正テーブル内に保存される。
(もっと読む)
回路モジュールおよび回路モジュールの製造方法
【課題】加速度センサの回路基板に対する傾斜角を高精度に制御し、高精度の加速度検出の可能な加速度センサを提供する。また、方位を高精度に維持する必要のある電子デバイスの実装において、傾斜角誤差を低減する。
【解決手段】複数の固定点で固定され、表面に素子搭載部および回路パターンを形成した回路基板10と、前記回路基板の素子搭載部に搭載された素子チップ20とを具備した回路モジュールであって、素子チップ20を、回路基板の1辺上の所定の間隔を隔てた位置から形成された2本のスリット21によって形成され、前記回路基板の中心近傍から前記1辺上に延びる片持ち梁22の内方端近傍に実装した。
(もっと読む)
外部ナビゲーションシステムによる,坑井測量用ジャイロスコープ計器及び慣性計器の方位初期化及び較正
【課題】坑井測量用のジャイロスコープ計器及び/又は慣性計器の方位初期化のためのシステム及び方法を提供すること。
【解決手段】このシステムは,ジャイロスコープ計器及び/又は慣性計器を剛性に接続できる剛基準構造物と,時間に応じた方位測定値を提供する外部ナビゲーションシステムであって,上記剛基準構造物は外部ナビゲーションシステムとジャイロスコープ計器及び/又は慣性計器との間に剛性な方向付けを提供するシステムと,時間に応じた方位測定値とジャイロスコープ計器及び/又は慣性計器の時間に応じた方向とを同期させることができるプロセッサと,を備える。
(もっと読む)
角速度算出装置、ナビゲーション装置、角速度算出方法
【課題】ロール方向の角速度を計測しない状況で、ロール方向の傾斜によるヨー方向の角速度計測値の誤差を補正することが可能な角速度算出装置を提供する。
【解決手段】車両2のヨー方向の角速度を計測した後に、車両2の旋回走行により発生する遠心力f1を算出し、その遠心力によるロール方向のモーメントを外力とする運動方程式からロール角θを算出する。そして角速度の計測値をcosθで除算することで角速度を補正する。
(もっと読む)
電子制御装置
【課題】角速度センサと加速度センサの両方を搭載する角速度センサ搭載エアバッグ電子制御装置が有する共振周波数帯を、各センサが利用する周波数帯全てと重ならないようにして制御対象を誤って制御しないようにする技術を提供する。
【解決手段】車両に搭載され、電子基板と筐体とを備え、車両に設けられた制御対象を制御する電子制御装置において、電子基板は、複数の固定点において筐体に固定され、複数の固定点から選択される複数点を頂点とする複数の領域のうち最も狭い対象領域に加速度センサ及び角速度センサの双方が配置されるため、各センサが配置される位置の共振周波数と各センサが利用する周波数とを外すことができ、誤制御を防止することができる。
(もっと読む)
移動環境における加速度計ベースの制御をサポートするための方法と装置
加速度計/ジャイロスコープベースの入力デバイスからの信号を処理する方法は、車両内に入力デバイスを設置することを含む。加速度計/ジャイロスコープベースの第二デバイスも車両内に設置される。入力デバイスは、車両が運動している間に手動で作動される。第一の信号が、手動で作動するステップに応答して入力デバイスから送信される。第二の信号が、車両の運動に応答して第二デバイスから送信される。第一の信号は、第二の信号に依存して調整される。 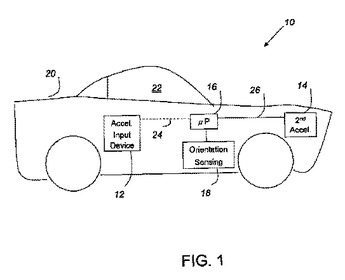 (もっと読む)
(もっと読む)
角速度補正装置、角速度補正方法、ナビゲーション装置及びナビゲーション機能付携帯電話機
【課題】角速度センサの検出値を高精度に補正し得るようにする。
【解決手段】PND1の制御部11は、補正値生成部49によって、ピッチレートデータPD21がピッチレート条件を満たすときのピッチレートデータPD11を基にオフセット補正値CFを算出する。また制御部11は、算出されたオフセット補正値CFを用い、オフセット補正部42によってピッチレートデータPD11を補正し、これを基に傾斜情報生成部43によって傾斜情報AIを生成する。従って制御部11は、急峻な坂道等で得られオフセット成分を表していないピッチレートデータPDを除外してオフセット補正値CFを生成でき、このオフセット補正値CFにより当該ピッチレートデータPDからオフセット成分を適切に除去することができる。
(もっと読む)
角速度センサーの補正方法
【課題】キャリブレーションを行う手間をかけることなく補正を行うことで、角速度センサーの検出値を正確に得ることが可能な角速度センサーの補正方法を提供する。
【解決手段】リンク3の一連の動きにおいて、角度センサー6がアクチュエーター4の回転角を検出する回転角検出工程と、回転角検出工程の後に演算部15が回転角を微分して基準の角速度を算出する基準の角速度演算工程と、回転角検出工程と同じ工程で、角速度センサー12が基体1に対するリンクの角速度を検出するリンクの角速度検出工程と、基準の角速度演算工程の後に、リンクの角速度が基準の角速度に近づくように補正するリンクの角速度補正工程と、を有する。
(もっと読む)
61 - 70 / 364
[ Back to top ]