
国際特許分類[G01C3/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749)
国際特許分類[G01C3/00]の下位に属する分類
細部 (1,609)
可変角度と観測地点内,例.機器内,における固定長の基線とからなる視差三角形を使用するもの (4)
可変角と,目標またはその付近あるいは目標自身により形成された固定長の基線とからなる視差三角形を使用するもの
固定角と,観測地点内,例.機器内,における可変長の基線とからなる視差三角形を使用するもの
固定角と,目標またはその付近,または目標自身により形成される可変長基線からなる視差三角形を使用するもの (2)
目標物を焦点合せすることによるもの,例.すりガラススクリーン上に
国際特許分類[G01C3/00]に分類される特許
11 - 20 / 134
画像処理装置および方法、画像処理システム、並びにプログラム
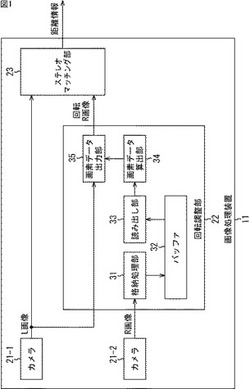
【課題】複数のカメラにより得られる複数の画像の相対的な位置の調整を、経年変化の影響を受けることなく、低コストかつ低レイテンシで行う。
【解決手段】格納処理部は、基準となる基準画像に対して被写体が所定の角度の分ずれている入力画像の画素の画素データをバッファに格納し、読み出し部は、角度の分だけ回転させた場合の入力画像において基準画像に対応する対応領域にある、入力画像の画素の画素データを、バッファから読み出し、画素データ算出部は、読み出し部によって読み出された画素データに基づいて、入力画像を角度の分だけ回転させた回転画像の画素の画素データを算出する。本技術は、例えば、ステレオカメラを備える画像処理システムに適用することができる。
(もっと読む)
撮像装置及びステレオカメラ

【課題】調整をした位置からずれることなく撮像センサを固定する。
【解決手段】一方の面には撮像レンズが、他方の面には撮像センサがそれぞれ対向して固定されたハウジングを含む撮像装置であって、撮像レンズを一方の面に固定する第一の固定部材と、撮像センサを他方の面に固定する第二の固定部材と、撮像センサの他方の面に対し垂直な方向以外の方向に対する遊動を規制する規制部材と、を含む。
(もっと読む)
撮像装置及び眺望判定方法
【課題】 任意の被写体を含む空間の眺望の程度を判定することができる撮像装置を提供する。
【解決手段】 任意の被写体を含む空間を撮像する撮像部8と、前記任意の被写体を含む空間の基準画像を取得する基準画像取得部4と、前記撮像部により撮像された撮影画像と前記基準画像とを比較することにより前記撮影画像における前記任意の被写体の眺望の程度を判定する眺望判定部4とを備える。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
車載カメラの光軸変動量の測定方法
【課題】車両に搭載されたステレオカメラの温度変化による光軸変動量を精度良く測定する車載カメラの光軸変動量の測定方法を提供する。
【解決手段】第1カメラを回転位置が180度異なる通常位置と反転位置とに切り替えて、基準温度における第1カメラ及び第2カメラの撮像画像間でのターゲットの画像部分の視差である第1視差と第2視差を算出する第1,第2視差算出工程と、特定温度における第1カメラ及び第2カメラの撮像画像間での前記ターゲットの画像部分の視差である第3視差と第4視差を算出する第3,第4視差算出工程と、第1視差と第3視差の差分及び第2視差と第4視差の差分に基づいて、特定温度に変化したときの第1カメラ及び第2カメラの光軸変動量を算出する光軸変動量算出工程とを含む。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
カメラシミュレーション装置、カメラシミュレーション方法、及びカメラシミュレーションプログラム
【課題】効率的にカメラパラメータのキャリブレーションを行う。
【解決手段】カメラシミュレーション装置において、レンズシステムを模擬した模擬カメラ系で撮像した画像を取得する模擬カメラ系画像取得手段と、前記レンズシステムの設計値での焦点距離を用いたピンホールカメラ系で撮像した画像を取得するピンホールカメラ系画像取得手段と、模擬カメラ系画像取得手段により得られる第1の画像と、前記ピンホールカメラ系画像取得手段により得られる第2の画像との差分値を出力し、前記ピンホールカメラを用いた三角測距の視差に対して、前記差分値を用いて視差誤差の予測値を出力する視差誤差出力手段とを有することで、上記課題を解決する。
(もっと読む)
画像補正方法及び画像補正装置
【課題】レンズと画像センサから構成されるカメラの特性を用いて高精度の画像補正をできるようにする。
【解決手段】カメラの焦点距離、画像センサの並進量に加えて、画像センサの傾きをパラメータとして画像センサから得られた画像を補正する。レンズアレイと画像センサから構成されるレンズアレイステレオカメラの場合には、各レンズが同じ方向を向いていること、各レンズの歪み特性が同一であること等を拘束条件として、カメラキャリブレーションを行い画像を補正する。
(もっと読む)
11 - 20 / 134
[ Back to top ]