
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
101 - 110 / 804
回転検出装置および回転検出方法
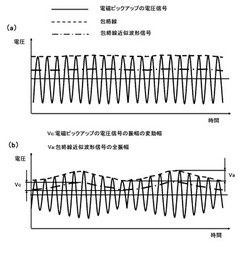
【課題】電磁ピックアップから出力される電圧信号に基づいて信号線の異常の予兆をとらえ、信号線の異常が実際に生じる前に修理等が可能な回転検出装置および回転検出方法を提供する。
【解決手段】回転歯車と、回転歯車の周面に近接して配置され回転歯車の歯の通過に伴い電圧信号を出力する電磁ピックアップと、電磁ピックアップからの電圧信号を受けて回転歯車の回転状態を検出する回転検出手段と、を備えた回転検出装置等において、回転歯車の回転数の安定状態を検出する安定状態検出手段と、回転数の安定状態において検出される電圧信号の振幅の変動幅Vcが基準値Vc0以上であるか否かを判別することにより電圧信号を伝送するための信号線の異常を予知する異常検出手段と、を備える。
(もっと読む)
位置速度制御装置

【課題】工作機械の主軸用の位置検出器として歯車と磁気式センサーを組み合わせた検出器では、機械に取り付ける状況により、振幅誤差、位相誤差が異なるため、位置検出器を機械に取り付けた状態で補正する必要がある。
【解決手段】回転位置に応じて出力される二相の正弦波信号A,Bの補正後の信号A’、B’は、A’=A−γa、B’=β(B−γb+A’・α)と表される。本実施形態では、速度制御時に速度指令値を積分した位置指令Plと位置検出値Pdとの差に基づいて、オフセット補正係数γbと位相補正係数α、振幅補正係数β、オフセット補正係数γaをそれぞれ算出し、これら補正係数に基づいて2相の正弦波信号A、Bを補正する。
(もっと読む)
角度検出装置およびその偏心量推定方法
【課題】特殊な目盛盤を必要とせず、二次元平面で偏心する目盛盤の偏心量をも正確に測定することができる角度検出装置およびその偏心量推定方法を提供すること。
【解決手段】回転軸13に支持された目盛盤12と、目盛盤12の表面に近接されかつ目盛盤12の周方向に等間隔で配置された3個以上の検出器14とを有する角度検出装置において、目盛盤12を所定の初期位置から基準角度θN回転させた際の回転角度θiを各検出器14で検出し、回転角度と基準角度との差から各検出器における角度誤差を測定し、回転中心Oaに対する各検出器の方向ベクトルPiを90度回転させて接線方向ベクトルqiを取得し、接線方向ベクトルqiとの内積が角度誤差になる偏心ベクトルeを演算する。
(もっと読む)
角度検出装置の異常判断装置
【課題】それぞれ「Ksinθsinωt」,「Kcosθcosωt」で表現されるA相被変調波SaやB相被変調波SbのゲインKが正しくない場合、現在の回転角度θについての正確な情報をうることができないこと。
【解決手段】A相被変調波Saは、A/D変換器34によってデジタルのサンプリング信号SAに変換される。制御装置40では、サンプリング信号SAの2乗の積算値(時間積分値相当量)を算出することで、サンプリング信号SAの2次関数を平滑化する。そして、積算値からゲインKの情報を抽出し、制御装置40の想定している本来のゲインとのずれ量をゲイン補正量として不揮発性メモリ42に記憶する。B相被変調波Sbのゲイン補正量についても同様に算出され記憶される。
(もっと読む)
ロータリエンコーダの信号処理方法
【課題】回転体の回転速度が高速である場合を含む幅広い速度範囲において、回転体の実際の回転状態に整合したロータリエンコーダのパルス信号のレベル値の切替わりを検知し、回転体の回転状態の把握を高い信頼性で行なう。
【解決手段】チャタリング排除時間を使用してチャタリング現象等に起因するパルス信号のレベル値の切替わりを除外した検知対象切替わりを検知する毎に、パルス幅を推定し、その推定したパルス幅に応じて、以後の切替わり検知処理で使用するチャタリング排除時間を設定する。推定したパルス幅により示される回転体の回転速度、又は推定したパルス幅から予測される回転体の将来の回転速度が速いほど、チャタリング排除時間を短くするように、該チャタリング排除時間を設定する。
(もっと読む)
回転角検出装置
【課題】複数のセンサの出力信号うちの1つの出力信号に異常が発生した場合に、異常が発生した出力信号を特定できるとともに、正常な他の出力信号に基づいて正確な回転角を演算することが可能となる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、第1の回転角演算部21、第2の回転角演算部22、第3の回転角演算部23、異常監視部24および最終回転角演算部25を含む。異常監視部24は、第1、第2および第3の出力信号V1,V2,V3に基づいて、各出力信号V1,V2,V3が正常であるか異常であるかを判定する。最終回転角演算部25は、異常監視部24の最終判定結果と、第1、第2および第3の回転角演算部21,22,23によってそれぞれ演算された第1、第2および第3の回転角θ1,θ2,θ3に基づいて、最終的な回転角θを演算する。
(もっと読む)
回転角検出装置
【課題】磁気センサが感知している磁極を特定できるようになる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、いずれかのセンサ値V1,V2に対してゼロクロスが検出された場合には、回転角演算装置20は、ゼロクロスタイミングを演算する。回転角演算装置20は、今回演算されたゼロクロスタイミングと、対応する出力信号に対して前回演算されたゼロクロスタイミングとの時間間隔(ゼロクロス間隔)を演算する。回転角演算装置20は、演算されたゼロクロス間隔と、対応する磁気センサの出力信号に基づいて最新に演算されたロータ1の1回転分のゼロクロス間隔の総和と、ロータ1の回転方向と、当該磁気センサに対応する振幅補正用テーブル(第1または第2テーブル)の内容とに基づいて、当該磁気センサが感知している磁極を特定する。
(もっと読む)
回転検出装置付き車輪用軸受
【課題】 異物の噛み込みによる磁気エンコーダの損傷を防止でき、かつ十分な回転検出精度が得られる回転検出装置付き車輪用軸受を提供する。
【解決手段】 転動体5を介して相対回転可能とされた外方部材1と内方部材2とを備え、車体に対して車輪を回転自在に支持する車輪用軸受である。外方部材1および内方部材2のうちの回転側部材の軸方向一端部に、円周方向に並ぶ複数の磁極対が等配された環状の磁気エンコーダ22を回転側部材と同心に設ける。この磁気エンコーダ22に対峙して磁気エンコーダ22の磁極対を検出するセンサ23を設ける。磁気エンコーダ22とセンサ23の間に介在して磁気エンコーダ22を保護する保護カバー18を設ける。センサの出力から磁極対の位相を逓倍する逓倍手段24を設ける。
(もっと読む)
回転角検出装置、トルク検出装置、及び電動パワーステアリング装置
【課題】高い角度分解能を確保しつつ、一の回転角センサが出力するセンサ信号に基づいて検出対象の機械的な一回転を一周期とする機械角の検出が可能な回転角検出装置を提供すること。
【解決手段】トルクセンサを構成する各回転角センサは、3倍角成分及び7倍角成分の合成波形を有するとともに回転角に応じた信号変化の位相が均等にずれた三相のセンサ信号を出力する。一方、各回転角検出部は、各センサ値a,b,cから該各センサ値a,b,cの平均値を減算して各センサ値a,b,cに含まれる7倍角成分の値を抽出することにより7倍の軸倍角を有する電気角θelを検出する。そして、その電気角θelに基づき推定される7個の機械角推定値θab_e(θab_e1〜θab_e7)を3倍角成分に換算して上記各センサ値a,b,cの平均値と比較することにより、検出対象であるステアリングシャフトの機械角θabを検出する。
(もっと読む)
インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法
【課題】インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法を提供する。
【解決手段】監視ユニット200において、走査ユニット16によるインクリメンタル目盛格子トラック14の走査から得られ、互いに位相がずれている少なくとも2つの位置信号P0、P90、P180、P270が入力される。監視ユニット200は、様々な位置信号P0、P90、P180、P270から、位置に応じた少なくとも2つの状態データワードZ1、Z2、Z3、Z4を生成することができる信号結合ユニット210と、状態データワードZ1、Z2、Z3、Z4が送信される評価ユニット220からなり、評価ユニット220では状態データワードZ1、Z2、Z3、Z4の比較によって無効の状態を確定することができ、無効の状態が確定された場合にエラー信号Fを生成することができる。
(もっと読む)
101 - 110 / 804
[ Back to top ]