
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
61 - 70 / 804
回転角度検出装置
【課題】 安価で耐久性のあるレゾルバを使用しながら、絶対的な回転角度位置を認識することが可能な回転角度検出装置を提供する。
【解決手段】 回転角度検出装置は、レゾルバ14におけるロータ32の外周部に90度の角度毎に配設された4個のホールIC41、42、43、44と、ロータ32に付設された磁石37とを備える。磁石37は、ロータ32の外周部の約100度の角度範囲に至る領域に配設されている。この磁石37は、ロータ32と同期して回転し、その回転角度位置に対応して、4個のホールIC41、42、43、44のうちの1個のホールIC、または、隣接する2個のホールICが磁気を検出する。
(もっと読む)
原点位置検出機構

【課題】本発明は、入力軸と出力軸との間に減速ギア機構を設けると共に、入力軸側と出力軸側に設けたホール素子からの各原点検出信号を用いて出力軸の原点位置を検出することを目的とする。
【解決手段】本発明による原点位置検出機構は、第1原点位置(11a)を検出した第1ホール素子(11)からの第1原点検出信号(11A)と第2原点位置(12a)を検出した前記第2ホール素子(12)からの第2原点検出信号(12A)とのAND信号(20)によって出力軸(4)の第2原点位置(12a)を検出する構成である。
(もっと読む)
エンコーダ装置、駆動装置、及びロボットシステム
【課題】駆動部を高精度に制御する。
【解決手段】エンコーダ装置は、駆動部によって回転される回転軸の角度位置に応じた第1の検出信号を出力する第1のエンコーダと、第1のエンコーダで検出される第1の検出信号に基づいて、回転軸の角度位置を検出する第1の角度位置検出回路と、回転軸の角度位置に応じた第2の検出信号を出力する第2のエンコーダと、第2のエンコーダで検出される第2の検出信号に基づいて、回転軸の角度位置を検出する第2の角度位置検出回路と、第1の角度位置検出回路と第2の角度位置検出回路とに対して、同一の周波数発生源によって生成された動作クロックを供給する動作クロック供給部と、を備える。
(もっと読む)
回転角度計測方法、回転角度計測装置、エンジンバルブ制御方法、およびエンジンバルブ制御装置
【課題】 本発明は、ロータリエンコーダ等、回転軸が一定回転角度回転するごとにパルス信号を出力するセンサから出力されるパルス信号に基づいて回転軸の回転角度を計測する回転角度計測方法等に関し、回転軸の回転角度を高精度に計測する。
【解決手段】 回転軸の回転速度を模擬した模擬データを取得し、その模擬データに基づいて、回転軸が一定角度回転するごとに出力されるパルス信号間の時間間隔を表わす時間データを算出し、その時間データに応じた計測遅れ角度を表わす遅れ角度データを算出することにより、回転速度と計測遅れ角度との対応関係を作成しておき、実際の計測において、回転軸の回転に伴うパルス信号から回転角度を算出し、その算出された回転速度を上記の対応関係に基づいて補正する。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
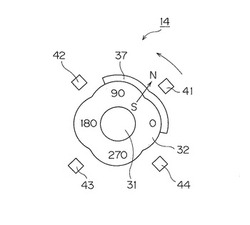
回転角検出装置
【課題】回転体が回転を開始した直後の早い段階で、磁気センサが感知している磁極を特定できるようになる回転角検出装置を提供する。
【解決手段】回転角演算装置20は、各磁気センサ21,22の出力信号V1,V2のピーク値を検出する。回転角演算装置20は、検出されたピーク値に基づいて、任意の隣り合う極位置特定用磁極それぞれに対する第1または第2の出力信号V1,V2の極値の比を演算する。回転角演算装置20は、演算された極値比と、極値比データに基づいて、各磁気センサ21,22が感知している磁極を特定する。回転角演算装置20は、特定した磁極に応じて、各出力信号V1,V2の振幅を補正する。回転角演算装置20は、振幅補正後の各出力信号V1,V2に基づいて、ロータ1の電気角θEを算出する。
(もっと読む)
エンコーダの周波数シフトの補償のための方法および装置ならびに周波数シフトが補償されたクロック
【課題】エンコーダの周波数シフトの補償のための方法および装置を提供する。
【解決手段】エンコーダの周波数シフトの補償のための方法は、入力エンコーダ信号の周波数値を決定するステップ(100)と、エンコーダインデックスのクロック信号と入力エンコーダ信号とを解析して、周波数シフトの値を決定するステップ(130)と、その周波数シフトの値を補償して、周波数シフトが補償されたクロックを生成するステップ(150)とを含む。エンコーダの周波数シフトを補償するための方法は、各々の機能または動作を別々の装置において実行するとともに、配線またはプリント回路基板によって接続される部品とされることができる。
(もっと読む)
VR型レゾルバおよび角度検出システム
【課題】軸倍角が3X以上のVR型レゾルバにおいて、角度検出の精度が高く、ゼロ点を検出することが可能で、更にゼロ点検出用の巻線を別途用意しなくてよい構成を提供する。
【解決手段】軸倍角が3XのVR型レゾルバにおいて、ロータコア104の構造をラジアル方向に突出した磁極104a,104b、ラジアル方向に突出していない磁極104cを備えた構造とする。また、突極102cと102eとに巻回されたcos検出巻線の巻回部分を繋ぐ配線の途中からゼロ点検出端子を引き出す。ゼロ点検出端子に現れる電圧波形に閾値を設けることで、ロータコア104の絶対角の検出が可能となる。
(もっと読む)
磁気−デジタル変換器、回転センサ及び回転角センサ
【課題】磁気抵抗の変化を従来技術に比較して小規模な回路で高精度なデジタル値として得ることができる磁気−デジタル変換器並びにそれを用いた回転センサ及び回転角センサを提供する。
【解決手段】磁気−デジタル変換器は、接地された接続点で互い接続された1対の磁気抵抗素子であって、上記接続点に接続された各第1の端子と、接地されない各第2の端子とを有し、磁界の変化を示す1対の信号を各第2の端子から出力する1対の磁気抵抗素子と、上記1対の磁気抵抗素子からそれぞれ出力される1対の信号をΔΣ変調して差動ΔΣ変調信号を出力するΔΣ変調手段と、上記ΔΣ変調手段からのΔΣ変調信号から上記磁界の変化を示すデジタル信号を取り出して出力するデジタルフィルタとを備えて構成される。
(もっと読む)
位置検出器
【課題】2相正弦波信号に歪みが発生した場合でも、より正確な位置検出を行うことが可能な位置検出器を得ること。
【解決手段】モータの回転速度に比例し、直交性を有する複数の2相正弦波の各相アナログ信号を生成するアナログ信号生成部と、各相アナログ信号を等間隔でサンプリングした各瞬時値を各相デジタル信号に変換するAD変換器と、各相デジタル信号の位相補正値を演算する位相補正値演算部8と、位相補正値に基づいて、各相デジタル信号の位相差を90度に補正して出力する信号補正部と、信号補正部の各相出力信号に基づいて、モータ1の位置情報であるモータ角度を演算する角度演算部とを備え、位相補正値演算部8は、各相デジタル信号を正弦波形にフィッティングして出力する正弦波フィッティング手段11と、正弦波フィッティング手段11の各相出力に基づいて、位相補正値を演算して出力する位相差演算手段12とを備える。
(もっと読む)
61 - 70 / 804
[ Back to top ]