
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
21 - 30 / 804
回転角度検出装置及びこれを用いた回転角度検出システム
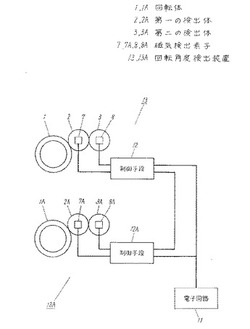
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置、及びこれを用いた回転角度検出システムに関し、簡易な構成で、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】回転角度検出装置13と13Aの制御手段12と12Aが、算出した回転角度を各々異なる所定時間後に出力すると共に、これらを接続し、他からの回転角度を検知した場合には、回転角度を出力しないように形成することによって、複数の回転角度検出装置13や13Aを用いた場合でも、車両の電子回路11には一つの回転角度の信号しか入力されないため、電子回路11の負荷が少なくなると共に、万が一、一方に故障等が生じた場合でも、他方からは回転角度が出力されるため、簡易な構成で、確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
エンコーダおよびこれを備えた装置

【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
エンコーダシステム
【課題】原点検出精度を向上させた信頼性の高いエンコーダシステムを提供する。
【解決手段】エンコーダシステム100は、複数のマークを備えた担持体11と、担持体11の移動方向に第1の距離だけ互いにずらして設けられ、複数のマークを読み取り可能なセンサ12、13と、センサ12、13の検出信号を演算処理する演算処理部14とを有し、演算処理部14は、担持体11がセンサ12、13に対して相対移動している際に、複数のマークのうち一つのマークが第1の距離だけ移動するのに要する第1の時間、および、複数のマークのうち隣接する二つのマークがセンサ12またはセンサ13による検出位置を通過するのに要する第2の時間を演算し、第1の時間および第2の時間から算出された第1の指標が原点位置を特徴付ける第2の指標に相当する場合、第1の指標の算出に用いられたマークパターンを原点マークパターンであると判定する。
(もっと読む)
信号変換装置の検査システム
【課題】信号変換装置を効率的に検査することのできる信号変換装置の検査システムを提供することを目的とする。
【解決手段】信号発生器2は、検査用入力信号を被検査体である信号変換装置10に出力する。ここで、検査用入力信号は、例えば、周波数が連続的な値を取り、かつ、周波数が被検査体である信号変換装置10に要求される周波数範囲の上限値と下限値との間で変化する信号とされている。信号変換装置10では、検査用入力信号に対する出力信号が生成され、この出力信号が処理装置3に出力される。処理装置3は、被検査体である信号変換装置10からの出力信号に基づいて信号変換装置10の異常判定を行う。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
エンコーダ信号処理回路
【課題】エンコーダ停止時の誤カウントなどを防止可能なエンコーダ信号処理回路を提供する。
【解決手段】エンコーダ信号のA相パルスとB相パルスからクロック同期のA相パルスとB相パルスを生成する回路と、クロック同期のA相パルスとB相パルスから4逓倍パルスを生成する4逓倍パルス生成回路と、クロック同期のA相パルスとB相パルスが交互に入力されているか否かに基づきエンコーダの停止時期を示す信号を作成する交互チェック回路と、前記エンコーダの停止時期以外に前記4逓倍パルスからノイズ除去済み4逓倍パルス信号を発生する回路とを有するエンコーダ信号処理回路。
(もっと読む)
エレベータのエンコーダ監視装置およびエレベータのエンコーダ監視方法
【課題】ハードウェアの簡素化、および低コスト化を実現する。
【解決手段】エンコーダから出力される2つのパルス信号の状態変化に基づいてパルス抜けを検出するものであって、第2のパルス出力信号の立上りエッジをDラッチ用のトリガ信号として使用し、第1のパルス出力信号の状態をラッチする第1のDラッチ回路部(11)と、第1のパルス出力信号の立上りエッジをDラッチ用のトリガ信号として使用し、第2のパルス出力信号の状態をラッチする第2のDラッチ回路部(12)と、Dラッチ回路部(11、12)のそれぞれのラッチ信号の排他的論理和を出力する排他的論理和ロジック部(13)と、排他的論理和ロジック部からの出力信号がHigh状態からLo状態に切り替わったことで、パルス抜けを検出し、異常信号として外部に出力する出力処理部(14、16、17)とを備える。
(もっと読む)
電動モータ
【課題】回転角センサおよび信号処理回路間において、回転角センサの出力信号へのノイズの混入を抑制できる電動モータを提供する。
【解決手段】モータケース1a内には、回転角センサ11、信号処理回路12、熱電変換素子13、充電回路14および二次電池15を含むセンサ回路が設けられている。回転角センサ11は複数のホール素子11a,11bからなる。信号処理回路12は、各ホール素子11a,11bの出力信号を増幅する増幅回路12a,12bを含んでいる。熱電変換素子13は、電動モータ1によって発生する熱を電力に変換する。充電回路14は、熱電変換素子13の出力電圧Vtを、二次電池15を充電可能な電圧まで昇圧し、昇圧後の電圧を用いて二次電池15を充電する。二次電池15は、信号処理回路12に電力を供給する。
(もっと読む)
21 - 30 / 804
[ Back to top ]