
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
11 - 20 / 804
磁界角計測装置およびそれを用いた回転機
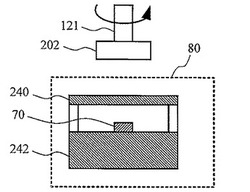
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
角度測定方法及び角度測定システム

【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】エンコーダ本体2aに対する回転軸3の相対的な回転角を検出するロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離され、エンコーダ本体2aの回転角を検出する非接触角度検出手段20(レーザ干渉式検出手段)とを備える。これにより、ロータリエンコーダ2が検出した回転角を、非接触角度検出手段20で検出した回転角に基づいて補正することができ、回転角を高精度且つ短時間で測定することが可能となる。
(もっと読む)
検出装置、駆動装置
【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
位置検出装置、及び駆動装置
【課題】高精度に位置情報を検出する。
【解決手段】位置検出装置は、被駆動体の位置に応じて互いに異なる位相差を有する出力信号を出力するn個の検出素子と、n個の検出素子に対して出力信号を逐次出力させて、n個の出力信号によって信号の1周期を構成された第1の検出信号を出力する出力部と、出力部から出力された第1の検出信号の1周期の周波数である基本周波数を含む所定の通過周波数帯域を有し、第1の検出信号のうちの所定の通過周波数帯域を通過させて位相変調された第2の検出信号を出力するフィルタ部と、フィルタ部から出力された第2の検出信号に基づいて、被駆動体の位置情報を検出する位置検出部と、を備える。検出素子の個数を示すnの値は、出力部から出力された第1の検出信号に含まれる検出素子の出力信号の誤差成分のうちの少なくとも所定次数の誤差成分を低減するように定められている。
(もっと読む)
回転角検出装置、及びトルクセンサ
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】モータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、複数のセンサ信号を所定の複数のしきい値レベルと比較して位相を検出し、検出した位相を示す第1の位相情報信号を出力し、複数のセンサ信号どうしを比較して位相を検出し、検出した位相を示す第2の位相情報信号を出力し、第1の位相情報信号及び第2の位相情報信号に含まれる検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号の中から一つを選択し、前記選択されたセンサ信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、検出した位相を示す位相情報信号を出力する。
(もっと読む)
検出装置、駆動装置
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
変位検出装置、目盛の校正方法及び目盛の校正プログラム
【課題】容易且つ安価に構成でき、高精度な目盛の測定誤差の校正を可能とする。
【解決手段】光電式エンコーダ100は、スケール10、検出ユニット20、演算部30を有する。検出ユニット20は、少なくとも3つの検出部21〜23を有する。各検出部は、第1検出部21及び第2検出部22間の測定点の間隔が、物理的に配置可能な最小間隔dとなるように配置され、第2検出部22及び第3検出部23間の測定点の間隔が、最小間隔dよりも大きな間隔となるように配置される。第1検出部21の測定点の出力を1ステップ前の他の検出部の測定点に合わせるように制御しつつ検出ユニット20をステップさせてサンプリングを行う。各検出部の測定点の間隔がすべてd以上となるにもかかわらず、d以下のサンプリング間隔で測定誤差を算出し、自律校正曲線を得てスケールの位置情報を補正することができる。
(もっと読む)
直線運動案内機構付アクチュエータ
【課題】ハウジングの軸線方向の端部に軸の回転位置を検出するセンサを設けることができ、また軸のストローク以上にスケールが長くなるのを防止できる直線運動案内機構付アクチュエータを提供する。
【解決手段】ロータ4の、軸受14a,14bに支持される軸線方向の端部10c−2を、ハウジング2の内側から外側に向かって軸受14a,14bから軸線方向に突出させる。ハウジング2に設けられるセンサ27によって、軸受14a,14bから突出するロータ4の端部10c−2の回転位置を検出することを可能とする。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置
【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
11 - 20 / 804
[ Back to top ]