
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
51 - 60 / 804
回転角検出装置、および、これを用いた電動パワーステアリング装置
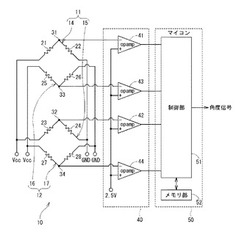
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
回転角計測装置,制御装置およびそれらを用いた回転機システム

【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、前記磁気センサからの出力が入力される検出部302と、を備えた回転角計測装置であって、前記回転角計測装置は、磁束発生体202を備えた回転体121とともに用いられるものであり、前記磁気センサの出力は、前記磁界方向に対応した原角度信号セット155であり、前記検出部は、前記回転体の回転速度を引数とする補正関数が出力する補正値を用いて前記磁気センサの近傍に配置された非磁性の導体の影響を補正した補正角度を出力する。
(もっと読む)
データム調整を伴う誘導センサ
【課題】 データム調整を伴う誘導センサを提供する。
【解決手段】 誘導位置センサは、移動可能なコア部材と、第1のセンサ巻線と、第2のセンサ巻線とを含む。第1および第2のセンサ巻線間の誘導結合はコア部材の位置を示すセンサ出力を提供する。センサは、コア部材のデータム位置を設定するための調整器を含む。調整器は、第1および第2の調整器巻線と調整部材とを含み、該調整部材は、移動可能であり、コア部材がデータム位置にあるときにセンサ出力をオフセットする調整器出力を提供するように、第1および第2の調整器巻線間の誘導結合を変化させる。
(もっと読む)
回転角検出装置およびそれを用いたアクチュエータ
【課題】 部品点数が少ない回転角検出装置を提供する。
【解決手段】 ECU71は、ホールIC751により検出されたパルス信号PS1と、パルス信号PS1のエッジ間のオン時間T1、オフ時間T2およびオン時間T3から生成した仮想パルス信号PS2とに基づいて各パルス信号PS1およびPS2のエッジE1〜E7をカウントすることにより、ロータ20の回転角を3.75度ごとに検出する。この構成では、1つのホールIC751に対し、ロータ20の回転に同期した2つのパルス信号PS1および仮想パルス信号PS2を用いて回転角を検出することができる。そのため、従来2つあったホールICの数を1つに減らしたとき従来と同等以上の分解能を得ることができる。つまり、分解能を維持しつつホールICの数を減らすことが可能である。
(もっと読む)
エンコーダ及びエンコーダシステム
【課題】 バックアップ中の消費電力を予め試験等により求める必要がなく、バッテリ寿命を正確に算出し、算出したバッテリ寿命に応じて適切に警告を外部へ出力することできるエンコーダを得る。
【解決手段】 主電源が遮断されている時間とバッテリ4の出力電圧から求めるバッテリ残容量とに基づき、主電源が遮断されている間のバッテリ4の消費電力を算出するとともに、このバッテリ4の消費電力と、主電源が再投入された後のバッテリ4の残容量とを用いて、バッテリ4がエンコーダ3をバックアップすることが可能な時間を算出し、外部へ警告を出力するバッテリ寿命判断部7を備える。
(もっと読む)
エンコーダ補正装置
【課題】モータ取り付け時のヒューマンエラーや、エンコーダ間の同心度悪化による補正精度の悪化を抑えるとともに、生産性の向上を図ることができるエンコーダ補正装置を得ること。
【解決手段】エンコーダ補正装置は、被試験モータ2の位置検出を行う被試験エンコーダ1を補正するエンコーダ補正装置であって、基準エンコーダ4と、基準エンコーダに取り付けられて、被試験モータのモータシャフト6と基準エンコーダの中心軸とを連結させる連結部5,7と、基準エンコーダの中心軸に垂直な面に沿って基準エンコーダを自由に移動可能に支持する支持部3と、を備える。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、検出信号の信頼性と検出精度とが低い。
【解決手段】複数の磁気センサ10は、正弦波波形と余弦波波形の検出信号を出力する。デジタルフィルタ30は、アナログデジタル変換器20でデジタル変換された検出信号を移動平均して振動成分を濾波する。変位補正器40は、不正な変位が発生する位相角帯域における正側にある検出信号を所定量マイナス方向に偏位させ、負側にある検出信号を所定量プラス方向に偏位させて、不正な変位を補正して除去する。位置演算器70は、検出信号から位置データを生成して出力する。ピッチ補正器80は、位置データを移動方向に合わせてピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
光学式アブソリュートエンコーダ及び装置
【課題】90度位相差の2つの正弦波信号を内挿演算することによって高分解能で回転位置を検出する光学式エンコーダにおいて、部品を追加することなく容易な手段で光学系の異常を検出することが可能な光学式エンコーダを提供する。
【解決手段】90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常レベルを記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力する。
(もっと読む)
位置検出装置及びサーボモータ
【課題】アクチュエータ毎に補正データを記憶するメモリを備える必要のない位置検出装置を提供する。
【解決手段】レゾルバ2がモータ1の回転位置情報を電気信号として出力し、その電気信号を電気ケーブル3で位置検出装置4のレゾルバデジタルコンバータ6に伝送し、レゾルバデジタルコンバータ6は電気信号からモータ1の回転位置情報を検出し、メモリ7に記憶されている電気ケーブルの情報に基づいて、演算装置8が検出されたモータ1の回転位置情報を補正することにより、レゾルバ2が設けられるモータ1毎に補正データを記憶するメモリを備える必要がない。また、電気ケーブル3の長さに対するインピーダンスの差による精度誤差情報を電気ケーブルの情報として記憶することにより、レゾルバ2で検出されるモータ1の回転位置の位置情報を正確に補正することが可能となる。
(もっと読む)
51 - 60 / 804
[ Back to top ]