
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
71 - 80 / 804
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
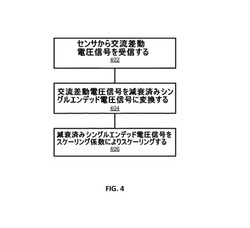
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
回転角度算出装置

【課題】誤差相関量εをゼロにフィードバック制御するための操作量として回転角度φを算出する場合、フィードバック制御によって回転角度φがハンチングする現象が生じえ、これにより、Z信号が誤って複数回出力されるおそれがあること。
【解決手段】比例ゲイン乗算部44では、誤差相関量εに比例ゲインKpが乗算され、積分ゲイン乗算部46では、誤差相関量εに積分ゲインKiが乗算される。積分ゲイン乗算部46の出力は、積分要素48に入力される。比例ゲイン算出部44の出力と積分要素48の出力との和が回転角度φである。回転角度φがZ信号に対応する基準角度θ0近傍となる場合、比例ゲインKpと積分ゲインKiとを低減する。
(もっと読む)
キャンバ角調整装置
【課題】安価でありながら、信頼性のあるキャンバ角調整装置を提供する。
【解決手段】駆動部材2と連結されるクランク軸4a1,4b2及びクランク軸に対して偏心したクランクピンを有するクランク部4と、一端の第1連結部でクランクピンに連結される連結部材51と、車体に連結されると共にキャンバ軸を形成するキャンバ部材と、車輪を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材51の他端に第2連結部で連結される回動部材と、クランク部4の回転角度を検出するインクリメント式のロータリーエンコーダ6と、モータに流れる電流を検出する電流検出部材60と、電流検出部材60の検出値に応じてロータリーエンコーダ6の原点を補正する制御部と、を備えることを特徴とする。
(もっと読む)
角度検出装置
【課題】故障に対する冗長性が高く、絶対角度の検出を高い精度で行える技術を提供する。
【解決手段】シャフト103にVRレゾルバ120とMRセンサ114を取付け、両者の軸倍角を2以上とし、且つ、両者の軸倍角の差を1とする。VRレゾルバ120の出力から算出される角度とMRセンサ114の出力から得られる角度の差からシャフト103の絶対角が算出される。ここで、VRレゾルバとMRセンサ114の故障モードが異なるので、故障に対する冗長性を確保することができる。
(もっと読む)
移動体の絶対位置検出装置
【課題】大掛かりな着磁管理をすることなく、低コストで移動体の絶対位置を検出できる移動体の絶対位置検出装置を提供する。
【解決手段】移動体の絶対位置検出装置1であって、演算器30は、逓倍回路18にて所定の区画に区分された、相対位置検出手段により検出された検出信号および逓倍回路18にて逓倍した検出信号のいずれかの区画において、絶対位置検出手段により検出した絶対位置信号が着磁信号を検出したときに、演算器30に備えられている記憶装置に1信号ピッチ分の情報を記憶し、これを移動体絶対位置特定スケール20の分解能分全てについて行うことにより移動体の絶対位置を特定する。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
回転センサ
【課題】構造誤差等に起因する測定誤差の発生を抑制して相対回転角度をより正確に演算し得る回転センサを提供する。
【解決手段】相対回転角度θが基準角度となるように相対回転させた回転子4について、正弦波相コイル3bからの正弦波信号に基づいて、基準角度からのずれが角度αとして予め測定され、余弦波相コイル3cからの余弦波信号に基づいて、基準角度からのずれが角度βとして予め測定される。そして、角度演算部60により、正弦波相コイル3bから出力される正弦波信号sin(θ+α)にcos(φ+β)を乗算したものから、余弦波相コイル3cから出力される余弦波信号cos(θ+β)にsin(φ+α)を乗算したものを減算して求められる(sinαsinβ+cosαcosβ)×sin(θ−φ)について、その変数部分である(θ−φ)が、上記所定値になるようにフィードバック制御を行って、相対回転角度θが演算される。
(もっと読む)
角度センサの検出信号補正方法
【課題】ホール素子に発生するオフセット電圧値を周囲温度に従って除去し、微小角度の測定精度を向上させる。
【解決手段】ホール素子から成る角度検出用センサ15は磁束密度検出面であるチップ面Tが、磁束方向と平行になる場合をθ=0となるように配置されている。センサ15の出力Vには、定電流Iを供給することで、角度変位θと無関係で内部抵抗に起因するオフセット電圧値O1が発生し、出力Vに重畳している。
オフセット電圧値O1を得るためには、オフラインにおいてセンサ15に無磁界状態で定電流Iを供給しながら温度Δtを変化させて、出力Vのデータを求める。データから温度Δtに対するオフセット電圧値O1のテーブルを作成する。
角度測定中では、周囲温度を測定し、オフセット電圧値O1を記憶したテーブルから求め出力Vから差し引けば、オフセット電圧値O1が除去される。
(もっと読む)
回転運動または周回運動を検出する運動検出装置
【課題】被検出体の回転数等の計数を行う無電源の運動検出装置において、被検出体の回転数等の検出の正確性を損なうことなく、運動検出装置の小型化、軽量化、低コスト化を図る。
【解決手段】回転運動する可動部13の外周部にスタンバイ磁石15、17およびアウトプット磁石16を周方向に間隔Daをもって設け、可動部13の周囲に磁気センサ1、2、3を間隔Daよりも大きい間隔Dbをもって設ける。回転軸150の回転に伴い可動部13が回転する間、スタンバイ磁石15、17が磁気センサ1、2、3のうちのいずれかの磁気センサの近傍を通過すると、当該磁気センサがスタンバイ状態となり、スタンバイ状態となった磁気センサの近傍をアウトプット磁石16が通過すると、当該磁気センサの磁性素子21において大バルクハウゼン効果が生じ、コイル22から検出信号が出力される。この検出信号に基づいて回転軸150の回転数を計数する。
(もっと読む)
回転角検出装置
【課題】各磁気センサの出力信号に3次高調波成分が重畳されている場合においても、正確な回転角を検出することができる回転角検出装置を提供する。
【解決手段】第1の3次高調波成分除去部21は、第1の磁気センサ11の出力信号V1から3次高調波成分が除去された信号sinθの近似値(sinθ)nを演算する。第2の3次高調波成分除去部22は、第2の磁気センサ12の出力信号V2から3次高調波成分が除去された信号cosθの近似値(cosθ)nを演算する。回転角演算部23は、第1の3次高調波成分除去部21によって演算されたsinθの近似値(sinθ)nと、第2の3次高調波成分除去部22によって演算されたcosθの近似値(cosθ)nとに基づいて、ロータ1の回転角θを演算する。
(もっと読む)
71 - 80 / 804
[ Back to top ]