
国際特許分類[G01G19/387]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 重量測定 (3,406) | グループ11/00から17/00に分類されない特殊な目的に適応される重量測定装置または方法 (1,472) | 組合わせの重量測定用,すなわちその合計重量または数量が要求値に最も近い物品の組合わせを選ぶもの (407)
国際特許分類[G01G19/387]の下位に属する分類
2つ以上の重量測定装置を使用するもの (10)
国際特許分類[G01G19/387]に分類される特許
21 - 30 / 397
自動移送装置
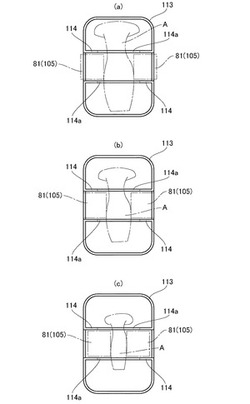
【課題】エリンギ等のきのこ類や野菜等の個々でサイズや形状のことなる被移送物の正確な位置管理が可能で、これらの被計測物を自動で移送することができる自動移送装置の提供。
【解決手段】移送元及び移送先に設置された仮置き台と、一又は複数のハンド79a,79bを有する把持ハンドユニットと、把持ハンドユニットを移送元と移送先との間で移動させる移動機構と、把持ハンドユニット及び移動機構を制御する制御手段とを備えてなる自動移送装置であって、仮置き台は、被移送物Aの中央部を載架させる互いに間隔を置いて平行配置された一対の載架部114,114を有する仮置き用トレイ113を備え、制御手段は、ハンド79a,79bに両載架部114,114間に位置する移送物Aの中央部を把持させ、移送先において両載架部114,114間に移送物Aの中央部を載架させる。
(もっと読む)
組み合わせ計測装置

【課題】複数の被計測物中から出荷に最適な被計測物の組み合わせを適宜選択できるとともに、被計測物の搬出、補充等の作業を自動的に行うことができる組み合わせ計測装置の提供。
【解決手段】計測手段は、複数の計測部5,5...を直線状に並べてなる複数の計測部列a,bを互いに平行配置に備え、搬出手段8は、計測部列方向に向けた搬出用レール11に移動可能に支持された複数の搬出用保持ハンドユニット13a,13b,13cを備え、搬出用保持ハンドユニット13a,13b,13cは、計測部列間方向に間隔を置いて被計測物を保持する複数のハンド32a,32bを備え、制御手段は、選択信号に基づき動作機構14に各搬出用保持ハンドユニット13a,13b,13cをそれぞれ選択された計測部上に移動させ、且つ選択された被計測物側のハンドのみを動作させるようにした。
(もっと読む)
組合せ秤
【課題】被計量物20がサイズや単体重量などがばらついても、所要数の被計量物20を計量ホッパ13に投入できるようにする。
【解決手段】各リニアフィーダパン6の搬送終端6aの被計量物20をそれぞれ検出する被計量物センサ7を設け、制御装置9は、リニアフィーダパン6を振動させるリニアフィーダ8の駆動を開始して、被計量物センサ7の検出出力が、検出状態(オン)から非検出状態(オフ)へ変化するまで、すなわち、搬送終端6aの被計量物20が供給ホッパ12に排出供給されるまでの経過時間を計測し、計測した経過時間に基づいて、リニアフィーダ8の駆動時間を補正するようにしている。
(もっと読む)
組み合わせ計測装置
【課題】複数の被計測物中から出荷に最適な被計測物の組み合わせを適宜選択できるとともに、被計測物の出荷用部材への詰め替え等の作業を自動的に行うことができ、作業時間の短縮及び費用の低減を図ることができる組み合わせ計測装置の提供。
【解決手段】多数の被計測物の中から規定個数で規定重量の許容範囲に合致する被計測物の組み合わせを選択する選択手段と、搬出手段により取出された被計測物を出荷用部材Bに詰め替えるパック詰め手段と、選択した各被計測物の重量と標準重量との差を求め、重量差に基づいて選択された各被計測物を予め設定された複数のサイズ種別の何れかに分類し、分類されたサイズ種別を示す判別信号を制御手段に出力する判別手段を備え、制御手段は、判別信号及び選択信号に基づき載せ換え機構110に選択された各被計測物Aa,Ab,Acをサイズ種別毎に設定された出荷用部材B上の位置に移送させる。
(もっと読む)
組合せ秤
【課題】 落下時の衝撃等によって被計量物を損傷させることがなく、かつ組合せ精度の向上及び生産性の向上を図ることができる組合せ秤を提供する。
【解決手段】 複数個の被計量物が搬送方向に並ぶように供給される複数の供給コンベア30と、供給コンベア30から搬出された被計量物を一時保持して搬出する複数の計量コンベア1と、各々、計量コンベア1に取り付けられ、計量コンベア1上に供給されている被計量物の重量を計量する複数の重量センサ2と、計量コンベア1から搬出される被計量物を搬送して外部へ排出する集合コンベア3と、被計量物の重量の合計が目標重量範囲内となる計量コンベア1上の被計量物の組合せを求め、この組合せに選択されている被計量物を搬出するように計量コンベア1を搬送動作させ、被計量物を搬出した計量コンベア1へ被計量物を搬出するように供給コンベア30を搬送動作させる制御部5とを備えている。
(もっと読む)
計量装置
【課題】被計量物の計量速度および計量精度が従来例よりも向上する計量装置を提供する。
【解決手段】計量装置100は、組合せ演算において、中投入計量ホッパ64、65、66、44内の被計量物の重量の合計が、所定の組合せ目標重量に最も近くなる中投入計量ホッパ64、65、66、44の組合せが求められ、組合せに選ばれた中投入計量ホッパ内の被計量物が組合せ選択排出され、被計量物の計量速度および計量精度が、ボリューム投入重量MB、組合せ目標重量と、小投入排出重量MRとによって調整される。
(もっと読む)
組合せ秤
【課題】被計量物20がばらついても、所要数の被計量物20を計量ホッパ13に投入できるようにする。
【解決手段】各リニアフィーダパン6の搬送終端6aの被計量物20をそれぞれ検出する被計量物センサ7を設け、制御装置9は、リニアフィーダパン6を振動させるリニアフィーダ8の駆動を開始して、被計量物センサ7の検出出力が、検出状態(オン)から非検出状態(オフ)へ変化したときに、搬送終端6aの被計量物20が、供給ホッパ12に落下供給されたとして、リニアフィーダ8の駆動を停止するようにしている。これによって、リニアフィーダパン6から供給ホッパ12へ所要数、例えば1個の被計量物20を供給し、供給ホッパ12から計量ホッパ13へ1個の被計量物20を投入するようにしている。
(もっと読む)
組合せ秤
【課題】組合せ秤から後段の装置への被計量物の投入時間の短縮を図る。
【解決手段】適量組合せに選択されて被計量物を排出する計量ホッパ91〜99の搬送方向の位置に応じて、搬送コンベヤ4の駆動および集合ゲート45の開閉を制御することによって、後段の包装機19への被計量物の投入を制御するので、適量組合せに選択されて被計量物を排出する計量ホッパ91〜99の内、最も上流側に位置する計量ホッパ91と最も下流側に位置する計量ホッパ99との距離が長い場合には、包装機19への被計量物の投入時間を短縮することができる。これによって、適量組合せに選択されて被計量物を排出する計量ホッパ91〜99の搬送方向の位置に拘らず、所要の投入時間内に包装機19へ被計量物を投入することができる。
(もっと読む)
混合計量用組合せ秤
【課題】複数の品種の被計量物を混合したミックス計量において、組合せの不成立による稼働率の低下を抑制する。
【解決手段】品種毎の組合せ演算において、組合せ重量が、許容範囲内である適量組合せの中で、組合せ重量が目標組合せ重量よりも大きい適量組合せを排出組合せとして優先的に選択する優先パターン、組合せ重量が目標組合せ重量よりも小さい適量組合せを排出組合せとして優先的に選択する優先パターン、または、組合せ重量が目標組合せ重量に最も近い適量組合せを排出組合せとして優先的に選択する優先パターンを、操作設定表示部11の操作によって設定することができるようにしている。
(もっと読む)
組合せ計量機のホッパアセンブリ
【課題】ゲートを開閉する駆動部を水滴等から十分に保護することが可能な組合せ計量機のホッパアセンブリを提供する。
【解決手段】組合せ計量機1のホッパアセンブリは、ホッパ支持ケーシング10aと、計量ホッパ5と、ゲート51と、マグネットカップリング45と、モータ21とを備える。計量ホッパ5は、ホッパ支持ケーシング10aの外側に配置される。ゲート51は、ホッパ支持ケーシング10aの外側に配置され、計量ホッパ5を開閉する。マグネットカップリング45は、主動磁石45aと、従動磁石45bとを有する。主動磁石45aは、ホッパ支持ケーシング10aの内側に配置される。従動磁石45bは、ホッパ支持ケーシング10aの外側に配置され、主動磁石45aに追従する。モータ21は、ホッパ支持ケーシング10aの内側に配置され、主動磁石45aを駆動することにより、従動磁石45bを介してゲート51を開閉する。
(もっと読む)
21 - 30 / 397
[ Back to top ]