
国際特許分類[G01G23/01]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 重量測定 (3,406) | 重量測定装置の付属装置 (631) | 重量測定装置の試験または較正 (241)
国際特許分類[G01G23/01]に分類される特許
41 - 50 / 241
はり構造起歪体および荷重測定法
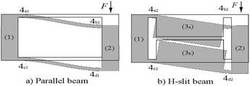
【課題】荷重位置に関りなく、被計量物の荷重位置によってもたらされる偶力の影響(偏置誤差)を消去し、どのような位置に荷重されてもその実荷重のみを知ることができ、また、必要であれば、その荷重位置を知ることも、その両方(荷重と荷重位置)を同時に知ることも可能であるはり構造起歪体および荷重測定法を提供する。
【解決手段】はり構造起歪体が、両端部を各々荷重側端部および支点側端部として有し、両端部の間に平行平板はり構造、H溝形状の断面を持つ平行はり構造(H溝型平行はり)、単純な単板はり構造、または、単板はりに複数の凹部もしくは凸部を有するはり構造から成る。このはり構造起歪体の起歪部の変形に起因する複数箇所の応力あるいは変位を電気信号として取得し、互いの信号値を比較演算処理することによって、その荷重値と荷重位置とを同時に取得する。
(もっと読む)
重心位置測定装置

【課題】簡易かつ安価な構成で車両の水平面的重心位置を測定することのできる重心位置測定装置を提供する。
【解決手段】車両3の各車軸7,8,9の左側の車輪4a,5a,6aが一つずつ載ることのできる第1の載台11と、第1の載台11を支持するロードセル25,26と、車両3の各車軸7,8,9の右側の車輪4b,5b,6bが一つずつ載ることのできる第2の載台12と、第2の載台12を支持するロードセル27,28と、ロードセル25,26からの荷重信号に基づいて車両3の幅方向の重心位置を演算する車両幅方向重心位置演算部50と、車両3の左右全ての車輪4a,5a,6a;4b,5b,6bが同時に載ることのできる第3の載台13と、第3の載台13を支持するロードセル21〜24と、ロードセル21〜24からの荷重信号に基づいて車両3の全長方向の重心位置を演算する車両全長方向重心位置演算部51とを備えるものとする。
(もっと読む)
重量測定装置
【課題】環境変化や物品の成分変動によるX線吸収率の変化等があっても、物品重量を正しく測定できるようにする。
【解決手段】X線照射手段23により測定対象の物品WにX線を照射し、その透過したX線をX線センサ24で受け、その画像情報を画像メモリ25に記憶する。X線吸収量算出手段26は、記憶されたX線画像から物品WによるX線吸収量を求め、重量換算手段28は、算出されたX線吸収量を、換算係数記憶手段27に記憶されている換算係数によって重量値に換算する。一方、荷重検出型測定部40は、物品Wの荷重を荷重センサ41で受けて、その物品Wの重量を検出する。換算係数更新手段29は、同一物品について重量換算手段28で得られた重量値と荷重検出型測定部40で得られた重量値とから、換算係数記憶手段27に記憶されている換算係数を更新する。
(もっと読む)
計量装置
【課題】フィルタの未応答に起因して生じる重量測定値の真の値に対する誤差に応じた補正値を適用することができ、これによって精確な重量測定値を求めることができる計量装置を提供する。
【解決手段】荷重信号を平滑するフィルタ17を備える計量装置1において、荷重信号から重量測定値を取得する重量測定値取得タイミングにおけるフィルタ17の未応答に起因して生じる重量測定値の真の値に対する誤差をフィルタ17の入力点および/または出力点から取得した荷重信号の応答特性に関わるパラメータに基づいて推定する推定誤差算出手段26と、この推定誤差算出手段26によって推定された誤差に基づいて重量測定値取得タイミングにて取得した重量測定値を補正する重量測定値補正手段27とを備えるものとする。
(もっと読む)
組合せ計量装置
【課題】各計量ホッパにおける計量精度測定が簡便に行えるとともに、組合せ計量処理時の運転サイクルの異常を把握しやすくする。
【解決手段】計量サイクルで動作する計量ホッパ5で既知重量のマスターワークを計量したときの計量値を予め設定された測定回数分保持し、当該測定回数に達した時点で前記マスターワークが供給された計量ホッパの繰返し精度を算出する算出部12と、算出部12で算出した繰返し精度に基づく精度算出値と予め設定された良否判定値とに基づき、マスターワークが供給された計量ホッパ5が正常に計量しているか否かの良否判定を行う良否判定部15とを備えた。
(もっと読む)
電子天秤用の較正装置
【課題】製造プロセス中に、最も効率的に電子天秤の休止位置および較正位置を調節できるようにする。
【解決手段】較正装置(40)が、駆動システム(43)を有する移送機構(44)を含み、少なくとも1つの較正分銅(41)を力測定デバイス(1)に結合させ、結合が、休止位置と較正位置(57)の間で案内移動させて較正分銅(41)を移送する移送機構(44)によって行われる。較正分銅は、まず、第1のエンドストップに移動され、次いで第2のエンドストップに移動され、2つのエンドストップ間で進行されるステップの数が、計数器システムによって測定され、一時的にメモリに記憶される。この数は、それぞれ、較正位置と第1のエンドストップの間の距離および休止位置と第2のエンドストップの間の距離を表す2つのパラメータを引くことによって減少され、減少後の数が、休止位置と較正位置の間の進行距離として記憶される。
(もっと読む)
WIMセンサを較正するための方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
荷重計
【課題】偏置の影響を受ける荷重計において、精度良く荷重値を測定することのできる荷重計を提供すること。
【解決手段】荷重計は、載置面上の第1の範囲および第2の範囲へ荷重された場合それぞれについて、荷重センサでの検出値の校正値を規定した校正テーブルA361,B362を予め記憶する。荷重計は、載置面に対して荷重をかけられた場所が、第1の範囲および第2の範囲のいずれであるかを判別するためのモード判別部102と、荷重センサでの検出値に基づいて荷重値を算出するための荷重値算出部104とを備える。荷重値算出部104は、モード判別部102による判別結果に従い、校正テーブルA361,B362のうち用いるべき校正情報を選択し、選択した校正テーブルを荷重センサでの検出値に適用することにより荷重値を算出する。
(もっと読む)
計量装置を調整するための方法および装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
高精度粉粒体定量供給システム
【課題】粉粒体の精密な切り出しができるようにする。
【解決手段】ロスインテーブルフィーダ10と、その下方に設けた電磁力平衡式荷重センサを用いた秤量コンベヤ11間にシュート12を配置する。そして、前記秤量コンベヤ11を定速で作動して、ロスインテーブルフィーダ10から切り出される粉粒体を計量し、その計量に基づいて、ロスインテーブルフィーダ10の切り出し速度を制御する。このように、ロスインテーブルフィーダ10の速度を制御して切り出し量を適正になるように保つ。また、ロスインテーブルフィーダ10の計量値で秤量コンベヤ11の計量値を校正することにより、常に精度を保つことができる。
(もっと読む)
41 - 50 / 241
[ Back to top ]