
国際特許分類[G01S11/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 反射または再放射を用いない距離または速度の測定方式 (222) | 電磁波と音波の伝播時間差を用いるもの (54)
国際特許分類[G01S11/16]に分類される特許
21 - 30 / 54
位置検出システム
【課題】施工が容易で、且つ、超音波の利用効率を高めることができるとともに、位置検出の精度を高めることが可能な位置検出システムを提供する。
【解決手段】位置検出対象の移動体Aに搭載され超音波を送波する超音波送波部11を有する送信装置1と、超音波送波部11から送波された超音波を受波するとともに受波した超音波を電気信号である受波信号に変換する複数個の受波素子が同一基板上に配列されたアレイセンサからなる超音波受波部21を有する受信装置2と、超音波受波部21の各受波素子で超音波を受波した時刻の時間差と各受波素子の配置位置とに基づいて受信装置2に対して送信装置1の存在する方位を求めるとともに、受信装置2と送信装置1との距離を求め、受信装置2に対する送信装置1の相対位置を求める位置演算部22と、超音波送波部11から送波される超音波の指向性を調整する指向性調整部18とを備える。
(もっと読む)
位置検出システム

【課題】施工が容易で、且つ、移動体の移動空間に応じて超音波受波部の検知エリアを変更可能な位置検出システムを提供する。
【解決手段】位置検出対象の移動体Aに搭載され超音波を送波する超音波送波部11を有する送信装置1と、超音波送波部11から送波された超音波を受波するとともに受波した超音波を電気信号である受波信号に変換する複数個の受波素子が同一基板上に配列されたアレイセンサからなる超音波受波部21を有する受信装置2とを備える。受信装置2は、超音波受波部21の各受波素子で超音波を受波した時刻の時間差と各受波素子の配置位置とに基づいて受信装置2に対して送信装置1の存在する方位を求めるとともに、受信装置2と送信装置1との距離を求める位置演算部22と、超音波受波部21の指向性を調整する指向性調整部28とを備えている。
(もっと読む)
距離測定システム及び距離測定方法
【課題】送信装置と受信装置間の距離の測定精度の低下を抑制できる距離測定システム及び距離測定方法を提供する。
【解決手段】受信装置に、赤外線の受信を検出してから超音波の受信を検出するまでの時間である到達時間と該到達時間に対応する超音波の直接波の受信時における所要受信強度との関係を示すテーブルを備えておく。送信装置から赤外線と超音波を同時に発信し、受信装置は、赤外線及び超音波を受信すると、該超音波の受信強度とテーブルから取得したその到達時間に対応する所要受信強度とを比較し、超音波の受信強度がテーブルから取得した到達時間に対応する所要受信強度よりも大きいとき、その到達時間の値を基に送信装置との距離を算出する。
(もっと読む)
手書き筆跡入力システム
【課題】 手書き筆跡入力システムに於いて、従来の、赤外線信号を変化させて識別用信号を送信する方法は、電子ペンの基本的構造及び機能の他に識別用信号を送信する為の何らかの処理を伴う為、電子ペンの電力の消費が大きくなってしまい、連続使用時間が短くなってしまうなどの欠点があった。
【解決手段】 手書き筆跡入力システムにおいては、電子ペンは余分な機能を備えることなく、なるべく少ない部品構成にし、電子ペン以外の部分に種々の機能を備えた方がよく、本発明は、電子ペンより発信され、受信で受信された超音波信号、つまり、1つの位置座標を生成する為に発信された超音波信号の少なくとも一部を用いることで、電子ペンの消費電力を増やすことなく、電子ペンを同定したり、識別したりすることを可能とした。
(もっと読む)
移動ロボットの位置推定方法及び装置
【課題】 信号発生装置によって発信された信号を正確に検出して移動ロボットの位置推定の正確度を高める方法及び装置を提供する。
【解決手段】 本発明は移動ロボットの位置推定方法及び装置に関するもので、本発明の一実施形態による移動ロボット位置推定方法は所定の信号発生装置から発信された第1信号及び第2信号を移動ロボットに具備された第1信号を受信するセンサと第2信号を受信する3個以上のセンサによって第1信号及び第2信号を受信する段階、第1信号から抽出された時間情報を使用して第2信号を受信する各センサまでの発信距離を計算する段階、及び発信距離から移動ロボットの位置を計算する段階を含み、第2信号は信号発生装置から2回以上発信され、第2信号を受信する各センサは最初受信された第2信号の測定結果によって、それ以降受信される第2信号の増幅の可否を計算する。
(もっと読む)
撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法
【課題】電波の使用が認められていない環境においても、画像を撮影した位置を正確に求めることができるとともに、その画像に対する書き込みを行うことができる。
【解決手段】撮影指示と書込指示を取得する入力部11と、撮影指示を取得した場合に被写体を撮影する撮影部12と、3台の端末の位置を予め記憶する記憶部17と、撮影指示を取得した場合に光を放射する発光部13を有する。また、音波を受信する音波受信部14と、音波を受信した時刻と光を放射した時刻を取得する時刻取得部15と、音波を受信した時刻と光を放射した時刻との差と音速とに基づいて各端末までの距離を算出し、自撮影位置特定装置の位置を算出する制御部16と、撮影部12の撮影結果に対して書き込まれる画像を生成し書込画像として取得する書込画像取得部51を有する。また、記憶部17は、撮影結果と書込画像と自撮影位置特定装置10aの位置とを対応付けて記憶する。
(もっと読む)
信号伝送装置
【課題】真水あるいは海水あるいは液状の高誘電体物質あるいはこれらを含む液体中において、電磁波信号を低損失で伝送させるための信号伝送装置を実現する。
【解決手段】発信手段21からは、320MHz以下の周波数帯の電磁波信号を小型のループアンテナ213によって液体中に放射し、当該放射された電磁波信号は、受信手段22に接続された小型ループアンテナ223によって受信する。ループアンテナ213と223は、当該液体の比較的に高い誘電率によって共振状態あるいはマッチング状態となり、電磁波信号を低損失で効率よく伝送することができる。
(もっと読む)
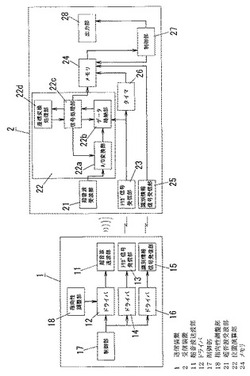
動線計測システム
【課題】検出対象が移動した位置を追跡するにあたり、検出対象ごとの移動の履歴の分析を容易にするとともに情報の秘匿性を高めた動線計測システムを提供する。
【解決手段】送信装置1は定位置に固定され疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体とするワイヤレス信号により識別データを送信する識別データ送信部12とを備える。受信装置2は、移動体のような位置検出の検出対象に搭載され、疎密波を受波することにより受信装置2の位置を記憶部26に格納する。受信装置2は、検出対象を特定する固有情報を入力する固有情報入力部28と、制御部20で求めた送信装置1の位置の履歴と固有情報入力部28から入力した固有情報とを記憶する記憶部27と、記憶部27に格納した記憶内容を非無線の伝送経路で取り出すインターフェイス26とを備える。
(もっと読む)
動線計測システム
【課題】検出対象が移動した位置を追跡するにあたり、誤差を考慮して位置を検出することにより求めた位置の信頼性を高める。
【解決手段】送信装置1は、疎密波を間欠的に送波する疎密波送波部11とを備える。受信装置2は、疎密波を受波する疎密波受波部21を備える。位置演算部24は、疎密波受波部21で受波した疎密波の到来方向を求め、さらに到来方向の誤差範囲から送信装置1が移動する平面内での送信装置1の位置の誤差範囲を求める。送信装置1の位置の誤差範囲の中心座標を送信装置1の座標位置として求め、さらに、誤差範囲の中で当該座標位置からの最大距離を最大誤差として求める。
(もっと読む)
プロジェクタ並びにプロジェクタの付属装置
【課題】従来の電子黒板では、信号処理器を取り付けたホワイトボードでしか平面上の座標が取れず、信号処理器を持たないホワイトボードでは座標取得ができない。また、画面4隅を指定するなど座標の初期化が必要である問題点があった。
【解決手段】信号処理器をプロジェクタに設け、またプロジェクタからスクリーンまでの距離を取得する手段をプロジェクタに設ける。これによって、信号処理器を持たないホワイトボードでも座標取得ができる。また、画面4隅を指定するなど座標の初期化が必要ない。
(もっと読む)
21 - 30 / 54
[ Back to top ]