
国際特許分類[G01S13/93]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783) | 衝突防止目的のもの (1,014)
国際特許分類[G01S13/93]に分類される特許
31 - 40 / 1,014
障害物検知装置及びコンピュータプログラム
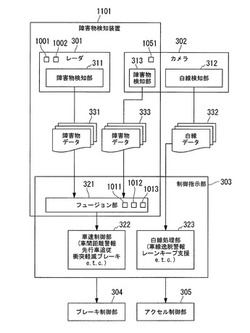
【課題】障害物検知装置1101において、障害物の誤検知を抑制する。
【解決手段】電波を送信する送信アンテナ1001と、前記送信された電波が障害物により反射された電波を受信する受信アンテナ1002と、前記受信された電波に基づいて障害物を検知する障害物検知部311と、前記検知された障害物について、あらかじめ設定された誤検知の特徴の有無を判定する誤検知判定部1011と、画像を撮像するカメラ302と、前記誤検知の特徴があることが判定された障害物について、前記カメラ302により撮像された画像に基づいて、当該障害物の有無を判定する障害物有無判定部1012と、を備える。
(もっと読む)
物体識別装置、および物体識別プログラム

【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】送信波照射に対する反射波に基づいて、少なくとも物体までの距離を含む物体単位データを車幅方向角度に対応して取得する。そして、反射波に基づいて得た物体の相対速度及び自車速に基づいて移動物か停止物という認識種別を判定し、認識種別の判定結果に基づいて、移動物の中から自車両180に対する先行車181及び先々行車182の各物体単位データを抽出し、停止物の中から道路に沿って設置された反射体の各物体単位データを抽出する。この後、自車両180、先行車181、及び先々行車182の各物体単位データを用いてこれら3点を円で近似することにより当該円の半径を算出し、円の半径と、反射体の列と、に基づいて道路形状を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出し、物体単位データに基づいて路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、抽出処理の後、前回周期の抽出処理で得た物体単位データを今回周期の抽出処理で得た物体単位データに追加するデータ追加処理を行い、認識処理ではデータ追加処理で得た物体単位データに基づき道路端を認識する。
(もっと読む)
システム及びプログラム
【課題】面白味があり、ユーザの注意を得やすく、親しみやすくなるシステム。
【解決手段】 警報対象の位置情報を記憶するデータベースから取得した当該警報対象の位置情報で特定される位置と、取得した車両の現在位置とが所定の接近関係を有する場合に表示部5のメイン表示領域R1に所定の警報を表示する制御部を備えたシステムである。所定の警報は、警報対象と関係のないキャラクタ300をアニメーション表示するようにした。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出する。また、抽出した物体単位データの中から、車幅方向の距離が最も自車側に位置する停止物体の横位置を抽出すると共に、車幅方向において最も自車側の停止物体の横位置から所定距離だけ離れた範囲内に位置し、かつ、自車からの直接の距離が最も小さい停止物体を起点に決定する。そして、接続条件として距離が単調増加であるデータ同士を起点から接続してグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
31 - 40 / 1,014
[ Back to top ]