
国際特許分類[G01S13/93]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783) | 衝突防止目的のもの (1,014)
国際特許分類[G01S13/93]に分類される特許
21 - 30 / 1,014
レーダ装置
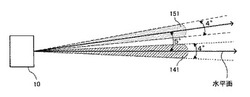
【課題】車両の遠方にいる歩行者等の物体、および、車両に近接した歩行者等物体の双方を高感度で検出できるレーダ装置を提供すること。
【解決手段】レーダ装置は、仰角面内において水平方向への指向性を有する指向性ビームを放射する水平用送受信アンテナと、水平より上方である所定の方向への指向性を有する指向性ビームとを放射する高仰角用送受信アンテナとを備える。また、レーダ装置は、指向性ビームを放射するアンテナを水平用送受信アンテナおよび高仰角用送受信アンテナのいずれか一方に切り替えるための切替手段を備える。
(もっと読む)
物標検出装置,壁判定方法

【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
船舶用航行支援装置
【課題】衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供する。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
(もっと読む)
車両用移動物体検出装置
【課題】自車両周辺における移動物体の移動状態ならびに移動量の認識精度を向上した車両用移動物体検出装置を提供することことを課題とする。
【解決手段】移動遷移状態把握部13によって、自車両の移動量に基づいて回避対象物体の特徴点位置の移動遷移状態を算出し、回避対象物体の特徴点位置の移動遷移状態に基づいて、回避対象物体の移動を認識する。また、移動量算出部19によって、回避対象物体における特徴点位置の移動遷移状態に基づいて、自車両に対する回避対象物体の相対的な移動量を算出し、回避対象物体の移動遷移状態を認識する処理周期と比較して十分に長い周期で回避対象物体の移動量を算出する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
21 - 30 / 1,014
[ Back to top ]