
国際特許分類[G01S17/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778)
国際特許分類[G01S17/88]の下位に属する分類
マッピングまたはイメージング用のもの (277)
衝突防止目的のもの (282)
気象用のもの (39)
国際特許分類[G01S17/88]に分類される特許
61 - 70 / 180
水中移動体の位置検知装置
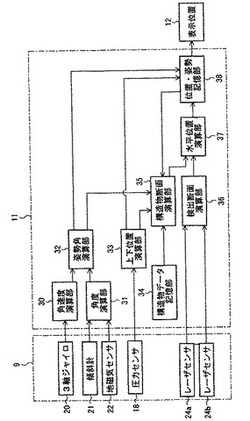
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
物体の位置情報算出方法

【課題】物体の存在だけでなく、物体の位置、寸法などの物体プロファイルまでを算出して出力することができる物体の位置情報算出方法を提供する。
【解決手段】3次元レーザレーダ10に取り込まれた物体の距離情報および走査情報などのレーザレーダ情報記録21を物体の位置情報を用いる座標系に座標変換22する。この変換情報から検出すべき領域の座標情報を検出領域設定23し、設定された領域外を背景情報として分離消去する。前記の検出すべき領域を複数のグリッドに分割し、各グリッド内の物体検出情報の個数をグリッド情報カウント25し、予め設定したカウント数より少ないカウント数のグリッドをノイズ情報グリッドとして消去する。消去されたグリッド以外のグリッドを囲む最小長方形領域27を求め、該領域の4つの頂点座標を物体の位置情報とし、該領域内の物体検出情報から物体の長さ、幅、高さなどの物体プロファイル情報として算出し出力する。
(もっと読む)
光走査型光電スイッチ
【課題】不慣れな者でも確実にカバーを取り付けることのできる光走査型光電スイッチを提供する。
【解決手段】光走査手段及び光電変換素子を収容し、軸線に直交する断面が略U字状の開口が形成された筐体1と、筐体1に対し取り付け取り外し可能に設けられ、筐体1の開口を覆うためのカバー4と、筐体1とカバー4との間に設けられる弾性変形可能なシール部材6とを備え、カバー4を筐体1に取り付ける取付方向Fにシール部材6を圧縮した状態でカバー4が筐体1に係合するためにカバー4および筐体1に形成された係合手段41,62と、カバー4が筐体1に係合した状態で取付方向Fとは異なる方向Sにシール部材6を圧縮する固定具40を受け入れ可能に形成された固定部43とを備えている。。
(もっと読む)
光位相差検出式の侵入物検知センサ
【課題】検知領域内に様々な距離が存在するような場合でも、正確に侵入物の有無を検知することができる光位相差検出式の侵入物検知センサを提供する。
【解決手段】第1〜第nの検知小領域DA1〜に夫々向かう第1〜第nの検出光DL1〜を、第1周期毎の第1〜第nの投光信号51〜に基づいて夫々投光する投光部33a〜,36と、検出光DL1〜の検知小領域DA1〜からの第1〜第nの反射光R1〜を夫々受光し、第1〜第nの受光信号71〜を夫々生成する受光部35a〜,37と、第1周期の自然数倍からなる第2周期毎に、投光信号51〜と受光信号71〜との第1〜第nの位相差PA1〜を夫々測定する位相差測定手段15,16,18bと、第1〜第nの位相差参照値PR1〜を夫々予め記憶した位相差参照値記憶手段18dと、位相差PA1〜と位相差参照値PR1〜との各差の何れかが所定範囲外にある場合、検知領域DA内に侵入物が有ると判定する判定手段18eと、を含む侵入物検知センサ1とした。
(もっと読む)
自己混合レーザセンサを有する安全システム及びそのような安全システムを駆動する方法
自己混合干渉で動作するレーザセンサ10を収容したセンサモジュール15を有する安全システムが記載されている。上記レーザセンサ10は、人間の身体等の物体の速度及びオプションとして該レーザセンサ10と該物体との間の距離に関する測定データを発生する。該レーザセンサ10により収集され、且つ、エアバッグコンピュータ等の制御回路30に供給される上記測定データに依存して、該エアバッグコンピュータは、エアバッグ35等の安全手段を駆動して人体の負傷を防止する。更に、このような安全システムを駆動する方法も記載されている。 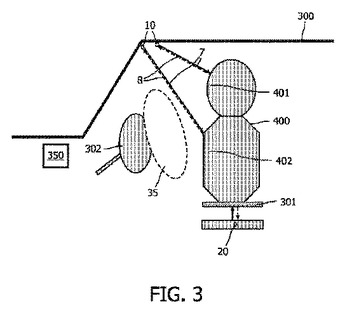 (もっと読む)
(もっと読む)
移動体位置測定装置、移動体位置測定方法、及び移動体位置測定プログラム
【課題】複数の装置を組み合わせて用いることなく、光学系による測定方法を工夫することにより飛翔体の位置測定精度を高めることができるようにする。
【解決手段】レーザ部1が2つの連続するレーザパルスを生成して発射すると、送信光学部2が送信レーザパルスP1を所定の時間間隔Δtでターゲット10へ送信する。受信光学部3が、ターゲット10で反射した受信レーザパルスP2を集光すると、多チャンネンル光検出部4が、受信レーザパルスP2を入射方向に対応するチャンネルごとに検出し、多チャンネル測距部5が送信レーザパルスP1の送信時刻と受信レーザパルスP2の受信時刻との時間差を測定する。そして、制御部8が、多チャンネル測距部5の測定した時間差によってターゲット10までの距離を算出すると共に、多チャンネンル光検出部4で検出されたチャンネルの位置からターゲット10の移動方向を算出する。
(もっと読む)
センサーユニットを備え自立走行可能な床用集塵装置及び対象
【課題】この種の装置及び対象を光学的な三角計測システムを用いて障害物からの距離計測に関して遠方領域でも正確な距離計測ができるように、改良すること。
【解決手段】本発明は、電動モータ駆動の走行ローラ(3)、装置筺体、集塵コンテナ、及び装置カバー(6)を備えた自立走行可能な床用集塵装置(1)であって、床用集塵装置(1)が障害物検出ユニットを有し、障害物検出ユニットが光源(10、10’)と、反射光用の受光レンズ(12)状の光学素子及び光検出素子(11)を有する受光ユニット(E)とを有する三角計測システム(T)である床用集塵装置に関する。課題を解決するために、光ビームが受光ユニット(E)内で、受光レンズ(12)によって集光(コリメート)された後に、障害物(13、13’)までの実際の距離の大きさに応じて、光検出素子(11)上に入射する光ビームの変位が大きくなるように、割り振られるように制御される。
(もっと読む)
ホットスカーフ溶削量測定方法及び測定装置
【課題】本発明は、鋼片上下面それぞれの溶削量を測定できるホットスカーフ溶削量測定方法および装置の提供を目的とする。
【解決手段】本発明は、鋼片の溶削前に上下面の表面高さ分布を測定するとともに、溶削しない側面の特定部位の上下方向の位置を記憶し、鋼片の溶削後に再度上下面の表面高さ分布を測定するとともに、前記特定部位の上下方向の位置を記憶し、前記特定部位の位置について溶削前後の上下方向の移動量及び傾き量を求め、当該上下方向の移動量及び傾き量により前記特定部位の位置を溶削前の状態に修正することにより、前記溶削後の鋼片の上下面の表面高さ分布を溶削前の位置に修正し、当該修正した鋼片の上下面の表面高さ分布と前記溶削前の上下面の表面高さ分布との比較から鋼片の上下面の溶削量の分布を求めることを特徴とする。
(もっと読む)
ボイラ火炉蒸発管の検査装置および検査方法
【課題】ボイラ火炉の内壁面に沿って上下方向に伸びて隣接配置される複数の蒸発管の減肉状態を、レーザ変位センサによって測定した蒸発管の表面形状に基づいて、精度良く、効率的に、広い範囲にわたって検査できるボイラ火炉蒸発管の検査装置および検査方法を提供すること。
【解決手段】ボイラ火炉内壁面に上下方向に伸びる複数の蒸発管4の表面に、マグネット18によって立設固定される支柱20と、該支柱20に固定されて蒸発管4の表面へ照射するレーザを生成する変位センサ12を支持する支持枠28と、該支持枠28に対して前記変位センサ12を蒸発管4の軸方向に移動せしめる移動機構31とから構成されるスキャン装置14を備え、さらに、前記変位センサ12からの信号による蒸発管4の断面表面形状と減肉の無い基準形状との差分から蒸発管4の減肉量を算出して減肉状態を評価する信号処理装置16を備えたこと。
(もっと読む)
データセンタのラック内に設置されたコンピューティング機器への位置情報の提供
【課題】データセンタのラック内に設置されたコンピューティング機器に位置情報を提供すること。
【解決手段】データセンタのラック内に設置されたコンピューティング機器に位置情報を提供する方法、装置、および製品であって、投影モジュールによって、データセンタのラックの上の少なくとも1つの反射面上の複数の基準点に複数の光信号を投影することであって、各光信号は、基準点のうちの1つに対応し、その対応する基準点の基準点位置情報を符号化する、投影することと、ラックのうちの1つに取り付けられた位置検出モジュールによって、反射面から反射された光信号のうちの1つまたは複数を検出することと、位置検出モジュールによって、基準点位置情報に従ってラック位置情報を判定することと、位置検出モジュールによって、位置検出モジュールが取り付けられるラックの位置を識別するのにラック位置情報を使用する位置情報コンシューマにラック位置情報を提供することとを含む方法、装置、および製品を開示する。
(もっと読む)
61 - 70 / 180
[ Back to top ]