
国際特許分類[G01S17/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778)
国際特許分類[G01S17/88]の下位に属する分類
マッピングまたはイメージング用のもの (277)
衝突防止目的のもの (282)
気象用のもの (39)
国際特許分類[G01S17/88]に分類される特許
41 - 50 / 180
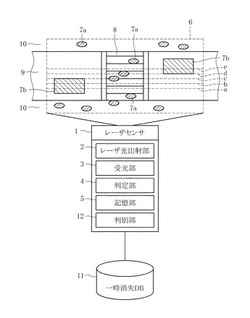
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
液晶表示装置および測距光学装置

【課題】 ビームスプリッタを備えた測距装置等において、安価で表現の自由度が高い液晶パネルを使用して、高輝度・高コントラストの表示が可能な表示装置を提供する。
【解決手段】 対物レンズと接眼レンズとの間の光路上に介装したビームスプリッタ3を介して、対物レンズからの観察像に、表示装置からの表示画像を合成する装置において、前記表示装置として、LEDをバックライト17aとして備える垂直配向型の液晶パネル17bを設け、かつ前記液晶パネルは、前記接眼レンズ(12)に向けた表示画像の光路L1に対して所定角度だけ傾斜して設ける。
(もっと読む)
センサ機構
【課題】
遮断手段を自動的に制御するためのセンサ機構であって、実際の通路部の領域および通路部の前方の領域の両方を確実かつ簡単な方法で検出できる機構を提供すること。
【解決手段】
ある走査角度(A)で互いに開いた2つのレッグの間に定義される走査範囲(12)を生成するスキャナ(10)を備え、該スキャナ(10)が水平方向の広がりが画定されている通路部の遮断手段(18)を制御するように構成された、走査領域(16)を走査するセンサ機構であって、スキャナ(10)が、通過方向(14)について見たときに、通路部および制御対象の遮断手段(18)から離して取り付けられ、走査範囲(12)が、通路部の方に向けられ、通路部を通過して延設されていること。
(もっと読む)
物体検出方法及びその装置
【課題】監視領域上における走査光の走査位置を基準にしなくても、監視領域の全体分に応じた走査光の反射光に関するデータを用いた正確な物体検出を実現すること。
【解決手段】信号処理部3で生成された計測データDを制御装置6がパケット通信により受信して、その計測データDを計測データ記憶領域64aの対応するアドレス箇所に記憶させる度に、受信した所定本数分の走査線に対応する計測データDからそれらの走査線上に存在する物体の検出を行い、さらに、解析結果記憶領域64bに記憶された最新の1フレーム分の物体検出データを用いて、走査範囲Eに存在する物体の検出を行う。1回のパケット通信により制御装置6が信号処理部3から受信する計測データDのデータ量は、走査線の1本分の計測データDと一致するデータ量とすることができる。
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
光電スキャナ
【課題】空間領域の走査において従来より大きな角度領域を捕らえられるスキャナの提供。
【解決手段】光線16を出射するための発光器12、第1の部分期間には前方の監視領域26を、また第2の部分期間にはスキャナ10の後方領域を交互に塗りつぶすように第1の偏向方向に光線を周期的に偏向させるための第1の偏向ユニット18、20、監視領域から拡散反射又は直反射された光線32から受光信号を発生させるための受光器38、及び受光信号に基づいて監視領域内の物体30を認識するように構成された評価ユニット40を備える光電スキャナを提供する。このスキャナには、光線を第2の偏向ユニット44へ向けて方向転換させるために後方領域に方向転換ユニット42が設けられ第2の偏向ユニットが光線を第1の偏向方向に対して横方向に延伸する第2の偏向方向に周期的に偏向させるように構成されている。
(もっと読む)
ホーム判定装置およびホーム判定方法ならびにそのプログラム
【課題】精度高く駅ホームの有無を判定できるホーム判定装置を提供する。
【解決手段】駅ホームの高さより高い列車の設置位置に設置され、駅ホームの上面から側面までの測距領域における複数の測距点と、設置位置との間の複数の距離を測定する測距センサから、当該複数の測距点に対応する複数の距離の入力を受け付ける。そして、測距センサの設置位置と、測定した複数の距離と、当該各距離を測定した際の測距センサからのそれぞれのセンシング角度と、を用いて、測距点と、設置位置との間の複数の距離を測定した際の、測距点それぞれの高さを算出する。そして、測距点それぞれの高さの算出結果と、ホーム高の予想高さとの関係に基づいて、駅ホームの有無を判定する。
(もっと読む)
障害物検出方法及びレーザ距離測定装置
【課題】踏切内の溝に人が入り込んだとしても、障害物として検出し得る障害物検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、踏切内に存在する歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、制御部6では、連続して取得する歩行者の計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理を行う。
(もっと読む)
水中移動体の位置検知装置及び位置検知方法
【課題】水中移動体の位置の検知精度を向上させることができる水中移動体の位置検知装置を提供すること。
【解決手段】水中検査装置9の垂直位置を検出する圧力センサ18と、水中検査装置と周囲の構造物との相対距離を検出するレンジセンサユニット23と、相対距離を検出した水平面における測定画像を算出する測定画像算出部36と、任意の水平面における構造物の外形の画像であって、画素の少なくとも1つに水平位置情報が付されている記憶画像が記憶された画像記憶部34と、水中検査装置の垂直位置に基づいて相対距離を検出した面に対応する記憶画像を選択する画像選択部35と、マップマッチングを行うことで選択画像上における測定画像に対応する部分を特定する対応部分特定部37と、対応部分特定部で特定された部分において相対距離を検出した位置に対応する画素を特定して水中検査装置の水平位置を算出する水平位置算出部38を備える。
(もっと読む)
光走査型光電スイッチ及びこれを組み込んだ外乱光表示装置
【課題】投受光に伴う光と外乱光とを区別して、受光した光が外乱光であると判別して外乱光の方位を特定する。
【解決手段】パーソナルコンピュータ(PC)によって光走査型光電スイッチ(1)の動作が常時モニタされているとき、光走査型光電スイッチ(1)のシンボル(S)から上方に扇状に広がるハッチングを付した領域に数多くの外乱光が見られ、この外乱光はシンボル(S)から放射状に延びる直線で表示される。投光タイミングと受光タイミングとの時間差tによって距離を計測し、また、受光した光軸番号によって方位を検知する。時間差tが非常に小さいときには外乱光であるとみなすことができる。
(もっと読む)
41 - 50 / 180
[ Back to top ]