
国際特許分類[G01S19/49]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | 衛星電波ビーコン測位システムからの信号から引き出される位置解と,さらなるシステムからの位置解とを,切り替えまたは組み合わせるもの (92) | さらなるシステムが慣性測位システムであるもの,例.loosely−coupled (52)
国際特許分類[G01S19/49]に分類される特許
41 - 50 / 52
測位装置、測位方法およびプログラム
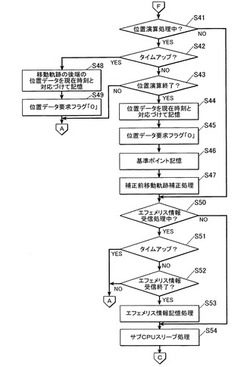
【課題】測位要求に応じて位置データを求める際に、測位衛星を利用した位置の測定が適切に遂行できなかった場合でも、位置データの欠落が生じることのない測位装置、測位方法およびプログラムを提供する。
【解決手段】測位要求がなされた際に、測位衛星を利用した位置の測定を実行させ、この位置の測定が遂行された場合に、この測位結果データを前記測位要求に応じた位置データとして取得する(S43,S44)一方、測位衛星を利用した位置の測定が遂行されなかった場合には、移動方向と移動量とを計測に基づく位置の測定結果データを測位要求に応じた位置データとして取得する(S42,S48)構成とする。
(もっと読む)
現在位置特定装置およびプログラム

【課題】GPS受信機を位置検出のための他の装置と併用する環境において、GPS受信機の消費電力低減を実現する新規な技術を提供する。
【解決手段】車両用ナビゲーション装置は、自律航法用のための信号を出力するセンサから出力される信号の値と車両の現在位置との間の関係式を用いて、センサが出力された信号に応じた前記車両の現在位置を算出し、また、GPS受信部が出力した信号に基づいて、間欠的に、前記関係式を補正する。また、車両用ナビゲーション装置は、関係式を補正したことに起因して(ステップ130)、GPSアンテナおよびGPS受信部への電力供給を一時的に停止させ(ステップ145)、その後、復帰条件が満たされたことに起因して、停止している前記電力供給を再開させる。
(もっと読む)
現在位置表示装置
【課題】GPS信号を再度受信した際に、GPS信号に基づく現在位置と、表示位置とが離れている場合に、スムーズにその誤差を解消して表示する。
【解決手段】GPS受信手段に基づいて現在位置を算出し、現在位置マークを表示する現在位置表示装置において、前記現在位置表示装置は、前記GPS受信手段によりGPS信号が受信できなくなった後、再度前記GPS信号が受信されると前記現在位置算出手段により前記再度GPS信号が受信された現在位置が算出され、該算出された現在位置と前記現在位置マークの位置とが所定距離以上離れているか否かを判定する位置比較手段を備え、前記表示位置決定手段は、前記位置比較手段が所定距離以上離れていると判定した場合、前記現在位置マークの位置を前記現在位置算出手段により算出された現在位置に段階的に近づくように移動させる。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】電力の消費を抑制しつつ、目的の変化に対応して位置精度を向上させる。
【解決手段】GPS受信部14及びCPU10は、所定の測位条件の成立毎に位置情報の測位(GPS測位)を行う。そして、地図データベース24は、一以上の景勝地の位置情報を複数種類のカテゴリーの何れかに対応付けて記憶する。そして、CPU10は、地図データベース24に記憶された景勝地から何れかを設定する。そして、CPU10は、設定された景勝地の属するカテゴリーに対応する大きさの領域を景勝地に対応付けて設定する。そして、CPU10は、GPS測位により測位した位置情報が設定された領域に属しているか否かを判定する。そして、CPU10は、この判定結果に基づいてGPS測位の測位条件を変更する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】測位手段による位置情報の精度の向上を図る。
【解決手段】CPU10は、GPS測位によって得られた少なくとも二以上の位置データに基づいて算出される移動ベクトルと、GPS測位によって得られた位置データとそれぞれ同時期に自律航法測位により得られた二以上の地点における移動ベクトルとをそれぞれ算出する。そして、CPU10は、算出された各移動ベクトルの差が所定範囲以内である場合には、GPS測位によって測定された位置データを移動履歴データ記憶部22に記憶するとともに、各移動ベクトルの差が所定範囲以内でない場合には、前回移動履歴データ記憶部22に記憶されたGPS測位によって測位された位置データを起点として自律航法測位による計測に基づいて算出された位置情報を移動履歴データ記憶部22に記憶する。
(もっと読む)
測位装置、測位方法及びプログラム
【課題】ユーザの現在位置の測位を行う測位装置において、ユーザの移動状態から有り得ない誤った測位結果が使用されることを防止する。
【解決手段】撮像装置1AのCPU10は、GPSユニット31における前回の測位結果と今回の測位結果に基づいて、ユーザの前回の測位位置からの移動距離Lを算出し、3軸加速度センサ16により検出されたユーザの移動状態に基づいて前回の測位位置からユーザが移動し得る距離の許容範囲を設定し、算出された移動距離Lが設定された許容範囲内である場合にGPSユニット31による測位結果を使用し、算出された移動距離Lが設定された許容範囲内ではない場合にGPSユニット31による測位結果を使用しないように制御する。
(もっと読む)
位置算出方法及び位置算出システム
【課題】ドップラー周波数の変動を考慮して、相関処理を適切に行うことを可能にすること。
【解決手段】INSユニット50及びGPSユニット60により算出された速度と、速度/方位センサーユニット70,80により検出された速度とが統合されて位置算出システム1の速度が算出される。また、INSユニット50及びGPSユニット60により算出された速度誤差と、速度/方位センサーユニット70,80により検出された速度誤差とを用いてドップラー誤差が決定される。そして、GPA15により決定された速度を用いてドップラー周波数が決定されるとともに、決定されたドップラー誤差を用いて相関積算時間が決定される。そして、INSユニット50及びGPSユニット60により算出された位置が統合されて、位置算出システム1の位置が算出される。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
慣性測定ユニット(IMU)のための空間整合判断
本明細書で開示する主題は、慣性測定ユニット(IMU)の空間整合を判断するためのシステムおよび方法に関する。例として、第1のビークルベース方向を識別し、第1のビークルベース方向を地球ベース座標フレームに変換可能な第1の方向に関連付ける方法について説明する。第1の方向に少なくとも部分的に基づいてIMUの空間整合を判断する。 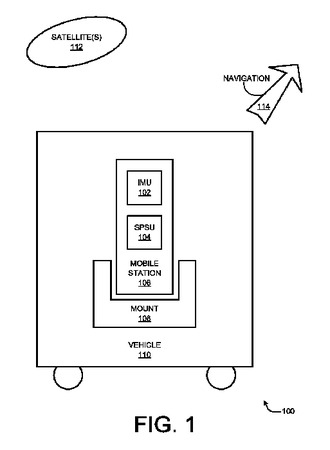 (もっと読む)
(もっと読む)
軌道ベースのロケーション決定
ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。 (もっと読む)
41 - 50 / 52
[ Back to top ]