
国際特許分類[G01S19/49]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 位置の決定 (226) | 衛星電波ビーコン測位システムからの信号から引き出される位置解と,さらなるシステムからの位置解とを,切り替えまたは組み合わせるもの (92) | さらなるシステムが慣性測位システムであるもの,例.loosely−coupled (52)
国際特許分類[G01S19/49]に分類される特許
21 - 30 / 52
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
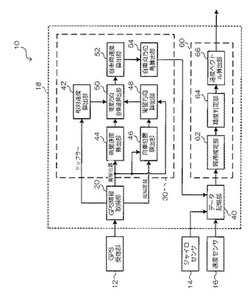
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
移動体用測位装置及びカーナビゲーション装置

【課題】測位精度を維持しながら省電力化が可能な移動体用測位装置を提供する。
【解決手段】GPS受信器10で、GPS衛星から送信される信号を受信し、受信した信号に基づいて車両の現在位置を検出する。制御部40では、車速センサ20により検出した車両の走行速度と方位センサ30で検出した車両の方位に基づいて、車両の現在位置を推測する。推測した車両の現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正した後、GPS受信器10の電源をオフし、その時点から、車速センサ20の車速検出誤差及び方位センサ30の方位検出誤差のうち少なくとも1つの誤差の時間経過に伴う累積値に基づき、車両の推測現在位置の誤差を算出し、誤差が予め設定した許容範囲を超えたときに、GPS受信器10の電源をオンして、車両の推測現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正するという動作を繰り返す。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 歩行体の移動に対する追従性が良好で、且つ、高精度な測位を行うことのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて歩行運動と方位に関する検出を行う自律航法用センサと、自律航法用センサの出力と歩幅データとに基づいて歩行体の移動量を算出する移動量算出手段と、前記自律航法用センサの出力に基づいて一歩ごとの移動方向を算出する移動方向算出手段(ステップS1)とを備え、移動量算出手段は、自律航法用センサの出力に基づき左右の足の踏込み方向の違いに起因する移動方向の一歩毎のブレ角度(θ)を算出するブレ角度算出手段(S2〜S4)を有し、歩幅データの値をブレ角度(θ)が大きくなるに従って歩幅が大きくなるように補正して一歩ごとの移動量として算出するようにした(S5)。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法測位と間欠的なGPS測位とを併用して移動経路中の各地点の位置データを取得していく場合に、間欠的にGPS測位を実行するタイミングを適切に決定することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS測位手段に間欠的に測位を行わせる(S11〜S14)一方、この間欠的な測位の間に自律航法測位手段に連続的に測位を行わせて(S5,S6)移動経路に沿った位置情報を取得していく測位制御手段を備え、前記測位制御手段は、基準地点と測位地点との二点間距離を算出する距離算出手段(S8)と、距離算出手段により算出された二点間距離に基づきGPS測位手段の間欠的な測位の実行タイミングを制御する測位タイミング制御手段(S10)とを有する。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
測位装置、測位方法、および、プログラム
【課題】 測定精度の高い位置データおよび軌跡データを取得することのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段と、移動方向及び移動量を計測する移動計測手段と、移動計測手段により計測された移動情報を当該移動の始点の位置情報に積算していくことで現在位置を算出する自律測位手段と、絶対位置測定手段により求められた現在位置の精度指標と自律測位手段により求められた現在位置の精度指標とを比較して、より高精度な現在位置データを選択する位置選択手段とを備え、絶対位置測定手段により求められた現在位置データが位置選択手段によって選択された場合には、選択された現在位置を基準点として設定し、自律測位手段により求められた現在位置の精度指標は、基準点から累積的に精度が低下するように設定される。
(もっと読む)
測位装置、測位方法、及び、プログラム
【課題】 車両移動を含む移動経路の軌跡の取得精度を向上させることができて、且つ、消費電力量を抑えることのできる測位装置、測位方法、および、プログラムを提供する。
【解決手段】 現在位置を測定する絶対位置測定手段(15)と、方位及びユーザの動きを計測する計測手段(16、17)と、計測手段の計測結果に基づき、ユーザの移動種別又は停止の判定を行う判定手段(21)、及び、ユーザの移動方向を特定する特定手段(22)と、車両による平均移動速度を算出する移動速度算出手段(10)と、車両による移動中に、特定手段で特定された移動方向へのこの平均移動速度での移動距離を、絶対位置測定手段により求められた基準位置情報に積算することにより移動位置を求める位置算出手段(10)と、を備える。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
サンプリング機能付きセンサデバイス及びそれを用いたセンサデータ処理システム
【課題】センサデバイス間での測定数比を任意に設定・保持し、その測定数比を維持したまま自律的に測定可能にすること。
【解決手段】複数のセンサデバイス間で測定数比を維持して測定するためのカウント命令をカウントするカウンタ511と、測定数比を所望の測定数比に設定し、複数のセンサデバイスが各自対応するように測定数比の設定値を保持する測定数比保持部512と、カウンタ511のカウンタ値と、測定数比保持部512により保持された測定数比の設定値とを入力し、カウンタ値と設定値との一致後にサンプリングタイミング信号を生成するサンプリングタイミング生成部513と、検知部514で検知された検知信号をサンプリングタイミング生成部513によるサンプリングタイミング信号でサンプリングするサンプリング部515とで構成されている。
(もっと読む)
測位システム、通信装置、及び測位方法
【課題】測位機能を有する情報処理装置の車載時の自律航法による位置情報の精度を向上させることができる測位システム、通信装置、及び測位方法を提供する。
【解決手段】測位システム10は、車両300に設けられたコネクタ308と嵌合するコネクタ110と、上記コネクタを介して、上記車両から上記車両の車速情報又は進行距離情報を受信する車両通信部102と、上記車両通信部により取得した上記車速情報又は進行距離情報に基づく伝送情報を、情報処理装置に送信する情報処理装置通信部104と、を有する通信装置100と、上記通信装置から上記伝送情報を受信する通信部214と、上記車速情報又は進行距離情報に基づいて現在位置を算出する位置算出部242と、を有する情報処理装置200と、を有する。
(もっと読む)
21 - 30 / 52
[ Back to top ]