
国際特許分類[G01S19/53]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 姿勢の決定 (16)
国際特許分類[G01S19/53]の下位に属する分類
国際特許分類[G01S19/53]に分類される特許
1 - 10 / 12
方位情報取得方法
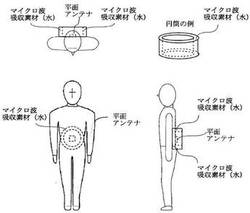
【課題】GPS衛星より送信される信号によりGPS受信機により方位情報を取得する方法に関して装置の使用文脈に適した廉価で効率的な方法で回折波の影響を弱化して正確な情報を得ることを可能にする。
【解決手段】体躯を用いて上空半天球の片側に存在するGPS衛星からの衛星信号の遮蔽を行うと同時に、体躯に沿い大地に垂直に設置されたGPS受信機に
他方の片側に存在するGPS衛星の衛星信号の探索を行わせつつ、捕捉した衛星信号を用いて方位を限定的に得る過程において、遮蔽物としての体躯の両脇からの回折波については、中空構造の容器中に充填された水又はそれに近い誘電損係数を備える物質を、前記GPS受信機の周囲に配備することで、廉価なGPS受信機を流用しているため影響を与えようとする回折波の弱化を効率的かつ必然性を有して所持している物質の有効活用を図りつつ実現し、GPS受信機が回折波の影響を排除し方位限定する事を助ける。
(もっと読む)
方位情報取得方法

【課題】GPS衛星より送信される信号によりGPS受信機により方位情報を取得する方法に関して装置の使用文脈に適した廉価で効率的な方法で回折波の影響を弱化して正確な情報を得ることを可能にする。
【解決手段】体躯を用いて上空半天球の片側に存在するGPS衛星からの衛星信号の遮蔽を行うと同時に、体躯に沿い大地に垂直に設置されたGPS受信機に
他方の片側に存在するGPS衛星の衛星信号の探索を行わせつつ、捕捉した衛星信号を用いて方位を限定的に得る過程において、遮蔽物としての体躯の両脇からの回折波については、中空構造の容器中に充填された水又はそれに近い誘電損係数を備える物質を、前記GPS受信機の周囲に配備することで、廉価なGPS受信機を流用しているため影響を与えようとする回折波の弱化を効率的かつ必然性を有して所持している物質の有効活用を図りつつ実現し、GPS受信機が回折波の影響を排除し方位限定する事を助ける。
(もっと読む)
異常値判定装置、測位装置、及びプログラム
【課題】GPS情報とINS情報とを統合して測位を行う場合に、GPS情報の異常値を精度良く判定する。
【解決手段】区間幅決定部22で、速度情報の累積誤差と擬似距離誤差との差が所定範囲の値となるように、INS情報とGPS情報とを統合する区間幅を決定する。区間幅内の各時刻で観測された速度情報及び擬似距離を、N点観測値記憶部24に記憶する。初期値設定部26で、N点観測値記憶部24に記憶されたINS情報に基づいて方位角及び移動ベクトルの初期値を設定し、最適解推定部28で、観測値(ρ,Δx)から推定初期値からの変位で表される状態(dx,Cb,dθ)を推定する方程式を立て、最小二乗法により推定初期値を更新しながら収束するまで繰り返して状態を推定し、収束したときの状態及び推定初期値から測位解を推定する。異常値判定部30は、測位解と擬似距離から得られる位置との残差γが閾値を超える擬似距離を異常値と判定する。
(もっと読む)
運転支援装置
【課題】停車状態でのGPSモジュールにより検出される自車両の位置の精度を判定することができるようにする。
【解決手段】GPSモジュールと、他車両情報取得手段と、衝突可能性判定手段と、情報提供手段とを備える運転支援装置において、自車両から出力される車速パルスに基づいて走行速度を検出する車速検出手段と、車速検出手段により検出された走行速度が0である時に、GPSモジュールにより検出された自車両の位置に基づいて、GPSモジュールの検出結果の有効性を判定するGPS有効性判定手段とを備える。
(もっと読む)
方位測定装置
【課題】高緯度における方位誤差を従来よりも低減する。
【解決手段】慣性センサの検出量に基づいて航走体の第1の方位角を測定するマスタコンパスと、一定間隔を隔てて配置された2つに受信アンテナを備え、各受信アンテナで間欠的に受信した測位用電波に基づいて各受信アンテナの位置を演算し、当該各受信アンテナの位置に基づいて航走体の基準方位角を測定する基準方位角測定手段と、該基準方位角測定手段から間欠的に入力される基準方位角に基づいて当該基準方位角よりも細かい間隔のバックアップ方位角を出力するバックアップ方位角演算部と、緯度が所定の基準緯度を超えない状態では第1の方位角を外部に出力し、緯度が所定の基準緯度を超えた状態ではバックアップ方位角を外部に出力する出力方位角切替部とを具備する。
(もっと読む)
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】車両速度及びヨーレートの算出精度を向上させることができる、車両用推定航法装置を提供する。
【解決手段】GPS情報から車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、タイヤの回転情報を検出するタイヤ回転情報検出手段と、タイヤの回転情報から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを逐次算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを逐次算出する第2パラメータ算出手段とを備える。
(もっと読む)
角速度センサ補正装置および角速度センサ補正方法
【課題】短期間であっても角速度の導出精度を向上させる技術を提供する。
【解決手段】測定部10は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサ26から出力された対象物の角速度とを取得する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、測位データと角速度との組合せを変更しながら、仮のオフセット値を逐次導出した後、仮のオフセット値に対して統計処理を実行することによって、オフセット値を導出する。感度係数演算部30は、測位データと角速度とをもとに、仮の感度係数を逐次導出した後、仮の感度係数に対して統計処理を実行することによって、感度係数を導出する。角速度変換部14は、感度係数、オフセット値、角速度とをもとに、最終的な角速度を導出する。
(もっと読む)
方位角推定装置及びプログラム
【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
1 - 10 / 12
[ Back to top ]