
国際特許分類[G05B11/36]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 自動制御装置 (494) | 電気式 (493) | 特別な特性,例.比例,微分,積分,を得るための装置をもつもの (345)
国際特許分類[G05B11/36]の下位に属する分類
比例特性を得るためのもの
積分特性を得るためのもの (2)
比例と時間依存特性の両方,例.P.I.,P.I.D,を得るためのもの (26)
国際特許分類[G05B11/36]に分類される特許
21 - 30 / 317
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
追加型制御装置およびその制御方法

【課題】既設の主たる制御装置に、容易に追加して制御能力を向上させることができるようにする。
【解決手段】制御対象2の温度をフィードバック制御する主たる制御装置1から出力される主制御信号に基づいて、制御対象2を制御する追加制御信号を出力する追加型制御装置7であって、前記主制御信号を、前記主たる制御装置1と当該追加型制御装置7とが干渉しないように、前記追加制御信号に変換する変換手段を備え、前記変換手段は、前記主制御信号の操作量を演算して、該操作量に予め対応付けられた操作量の前記追加御信号に変換する。
(もっと読む)
バンプレス調節弁操作
【課題】操作の安全性および弁の耐久性確保に不可欠な要件であるバンプレス調節弁操作を実現する手法を提供する。
【解決手段】制御系の開ループ手動操作で、適切なリセット時間で発生する操作量のランプ(傾斜)変化と、これに対する制御量応答とを計測および解析する。解析結果から、操作量から制御量までの定位性制御対象信号伝達特性値、すなわちゲイン定数Kと遅れ時間(等価時定数T+等価むだ時間L)とより、最適リセット時間RoをRo=4*|K|*(T+L)とする。ワンパラメータ(R)チューニングによりバンプレスな調節弁操作を行うことができる。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
フィードバック制御装置、フィードバック制御方法、モータ及びロボット
【課題】所定動作量(例えば動作速度)以下においても位置決め精度の低下や振動の抑制を図ることを目的とする。
【解決手段】制御対象の動作状態を検出する状態検出器を介して、フィードバック信号を取得するフィードバック信号取得手段と、前記フィードバック信号取得手段で取得したフィードバック信号から誤差成分の周期情報を検出する誤差周期検出手段と、制御指令信号、又は前記フィードバック信号と、前記誤差周期検出手段で検出した周期情報とに基づき、前記誤差成分の周波数を算出する誤差周波数算出手段と、前記誤差周波数算出手段で算出した周波数の信号成分を除去するフィルタを用いて、前記制御対象に出力する制御信号をフィルタリングするフィルタリング手段と、前記制御指令信号の示す動作量又は前記フィードバック信号の示す動作量に基づき、フィルタ形状を算出するフィルタ形状算出手段と、を備える。
(もっと読む)
物理量制御装置
【課題】動作条件の設定が容易で設定ミスを起こしにくい物理量制御技術を提供する。
【解決手段】物理量制御装置は、被制御物の被制御値と予め与えられた設定値とを一致させるように、被制御物の被制御値を変化させる手段へ供給する駆動信号を出力するコントローラと、第1の目標値に対して単位時間毎に一定の変化量を減算して得られる値、又は第1の目標値より相対的に小さい第2の目標値に対して変化量を加算して得られる値を設定値としてコントローラに出力する設定値出力部と、設定値出力部により出力される設定値が第1の目標値又は第2の目標値に至ったときに設定値出力部による変化量の減算又は加算を停止させる停止判定部と、変化量を入力するための操作部を備える。
(もっと読む)
多重系モータの制御装置及び移動体
【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
制御系の評価装置およびその方法
【課題】 周波数特性に不確かさを有する制御対象を含む制御系の安定性を正確に評価する。
【解決手段】 特性データ取得部11は、制御器の周波数特性を取得する。変動データ取得部12は、制御対象のゲイン特性および位相差特性を取得する。伝達特性演算部13は、複素座標系において、ゲイン特性の変動範囲と位相差特性の変動範囲が重なる領域を制御対象の周波数特性の変動範囲として、周波数特性の変動範囲と制御器の周波数特性から制御系の一巡伝達特性とその変動範囲を演算する。評価部13は、一巡伝達特性とその変動範囲から制御系の安定性を評価する。
(もっと読む)
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて制御対象の安定した制御を実現すると共に、目標値の推移を操作員によって容易に設定する。
【解決手段】制御装置128は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部140と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部142と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部144とを備え、第1伝達関数は、ユーザによる操作入力に応じて設定された複数の目標点に基づき、隣接する目標点同士を結線して形成される。
(もっと読む)
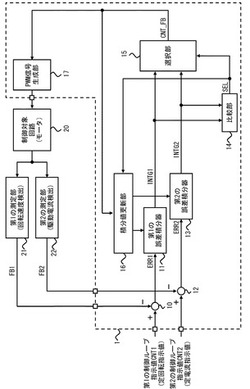
制御装置及び制御方法
【課題】一方の測定器から他方の測定器へ切り替えられた場合においても、測定値を突然変化させることなく熱間圧延装置の制御を適切に継続する。
【解決手段】第1のプロセス値として測定するマルチゲージ123(第1の測定部)と、第2のプロセス値として測定する平坦度計127(第2の測定部)と、マルチゲージ123(第1の測定部)の異常を検出する異常検出部12と、プロセス情報を記憶するプロセス情報記憶部2と、第2のプロセス値を補正するための学習項Zを算出する学習項算出部13と、学習項Zを記憶する学習項記憶部3と、補正板幅値(補正プロセス値)を生成する補正部14と、異常が検出された時点以前における第1のプロセス値と、異常が検出された時点以降における補正板幅値(補正プロセス値)とを選択する選択部15と、選択されたプロセス値及び補正プロセス値に基づいて、圧延ラインの制御を行う機器制御部16とを備える。
(もっと読む)
21 - 30 / 317
[ Back to top ]