
国際特許分類[G05B11/36]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 自動制御装置 (494) | 電気式 (493) | 特別な特性,例.比例,微分,積分,を得るための装置をもつもの (345)
国際特許分類[G05B11/36]の下位に属する分類
比例特性を得るためのもの
積分特性を得るためのもの (2)
比例と時間依存特性の両方,例.P.I.,P.I.D,を得るためのもの (26)
国際特許分類[G05B11/36]に分類される特許
31 - 40 / 317
プラント制御装置及び厚板圧延システム
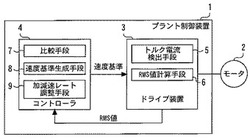
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
流体制御装置

【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
制御装置および制御方法
【課題】制御動作が不安定化するパラメータ設定が行なわれてしまう恐れを低減する。
【解決手段】制御装置は、設定値SPの変更による過渡応答時に有効な操作量上限値OHsを記憶する過渡操作量上限値記憶部3と、定常運転時に有効な操作量上限値OHgを記憶する定常操作量上限値記憶部4と、設定値SPの変更を検出する設定値変更検出部5と、過渡応答の完了を検出する過渡応答完了検出部6と、設定値SPの変更時点から過渡応答の完了時点までの時間帯では操作量上限値OHsを制御演算で使用する操作量上限値OHとして設定し、それ以外の時間帯では操作量上限値OHgを操作量上限値OHとして設定する操作量上限値切り替え部7と、制御演算により操作量MVを算出し、操作量MVを操作量上限値OH以下に制限する上限処理を実行して出力する制御演算部8とを備えている。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
データ収集装置およびデータ収集方法
【課題】制御量と操作量の整定状態を検出して、制御対象のモデリングのためのデータ収集を実行する。
【解決手段】データ収集装置は、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、制御量の挙動を計測する整定判定条件検出部2と、操作量上限値が出力される時間と操作量下限値が出力される時間を計測する出力時間計測部3と、AT実行中の平均操作量を算出して整定操作量とし、AT実行時の操作量切換点となる制御量を整定制御量とする整定状態推定部4と、AT終了後、整定操作量を出力する出力維持部5と、制御量が整定制御量の近傍にある継続時間が、特定時間以上になった場合に、整定状態になったと判定する整定状態検出部6と、整定状態が検出されたときに、制御対象のモデリングのためのデータ収集を実行するデータ収集実行部7とを備える。
(もっと読む)
プログラム、記録媒体、サーボドライバの制振制御の設定装置および設定方法
【課題】サーボドライバの制振制御の設定におけるユーザの作業性を向上させることを可能にする技術を提供する。
【解決手段】制振制御のパラメータを設定するためのプログラムが提供される。プログラムは、サーボモータの試運転のための運転パラメータを受付ける第1の入力部41と、サーボモータを試運転させるための要求を受付ける第2の入力部42と、制振制御を設定するための制御パラメータを受付ける第3の入力部(制振制御設定部50)とを有する設定ウィンドウW1を、表示装置の画面に表示させる。ユーザは、サーボモータのテスト運転および制振制御の設定を1つのウィンドウ(サブウィンドウW1)の中で行なうことができる。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
電力使用量予測装置および電力使用量予測方法
【課題】ヒータの昇温能力の経時変化を電力使用量の予測に反映する。
【解決手段】電力使用量予測装置は、ヒータの加熱する能力を表すヒータ能力係数HPを記憶するヒータ能力係数記憶部5と、制御対象を単位温度加熱するのに必要な時間を表す昇温時間係数THを記憶する昇温時間係数記憶部6と、ヒータの電力使用量を予測する電力使用量予測部7と、操作量上限値OHを取得する操作量上限値取得部8と、昇温を開始した後に操作量MVが操作量上限値OHに到達している時間帯において制御対象を単位温度加熱するのに必要な時間を表す実績値THxを求める時間実績計測部11と、実績値THxに基づく補正が昇温時間係数THを大きくする補正になると判定した場合のみ、実績値THxを用いて昇温時間係数THを補正する昇温時間係数補正部12とを備える。
(もっと読む)
初期化操作方法
【課題】目標操作量まで滑らかに変化するように接続できるとともに応答性を改善し得る初期化操作方法を提供する。
【解決手段】積分器3からの出力が比例成分項を含む多項式で表わされる制御器1を用いて制御を開始する際、その時点での目標値rと制御量yとの差である制御偏差を無くすようにする初期化操作方法であって、初期化時に、多項式の内、少なくとも1つの比例成分項を積分バイアス量xbとして分離し、独立した式として設定することを特徴とする。
(もっと読む)
31 - 40 / 317
[ Back to top ]