
国際特許分類[G05B11/36]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 自動制御装置 (494) | 電気式 (493) | 特別な特性,例.比例,微分,積分,を得るための装置をもつもの (345)
国際特許分類[G05B11/36]の下位に属する分類
比例特性を得るためのもの
積分特性を得るためのもの (2)
比例と時間依存特性の両方,例.P.I.,P.I.D,を得るためのもの (26)
国際特許分類[G05B11/36]に分類される特許
51 - 60 / 317
液体流量制御装置、液体流量制御方法、基板処理装置および記憶媒体
【課題】液体流量制御装置の制御可能総流量範囲を広くすること。
【解決手段】第1の流量制御ユニット21Aは、小流量の第1の制御可能流量範囲を有する第1の流量制御弁23Aを有しており、第2の流量制御ユニット21Bは、大流量の第2の制御流量範囲を有する第2の流量制御弁23Bを有しており、第1および第2の制御流量範囲には重複範囲がある。総流量の要求値の変化に応じて、第1および第2の流量制御ユニットの一方または両方に液体が流れる。第1および第2の流量制御ユニットを流れる液体の合計流量を増大させてゆく過程においては、第1および第2の流量制御ユニットの一方を流れる流量を固定しつつ他方を流れる流量を増大させる。
(もっと読む)
プラントの制御装置

【課題】 プラントを制御する制御量のリミット処理を行うことによる制御性の悪化を最小限に抑制することができるプラントの制御装置を提供する。
【解決手段】 リミット処理の対象となるフィードバック制御量UMとリミット処理後フィードバック制御量UMFとの差分値dLMTの過去値に応じて、フィードバック制御量の修正値DLMが算出され、フィードバック制御量Uを修正値DLMにより修正して、修正フィードバック制御量UMが算出される。修正フィードバック制御量UMのリミット処理が行われ、リミット処理後フィードバック制御量UMFが制御入力としてプラントに入力される。修正値DLMは、プラントの応答特性を示す応答特性パラメータαに応じた値に設定される修正係数KMと、差分値dLMTの過去値とを用いて算出される。
(もっと読む)
オートチューニング実行装置および方法
【課題】ATの実行を可能な限り効率化する。
【解決手段】オートチューニング実行装置は、リミットサイクル方式のATを実行するAT実行部1と、干渉関係の存在によりATの同時実行が禁止される制御ループを示す同時実行禁止情報を記憶するインターロック登録部2と、ATを起動すべき制御ループを記憶し、ATの実行が完了した制御ループの登録を削除するAT起動登録部3と、AT起動指示部5から起動を指示された制御ループについて、予め規定された規則に従って同時実行禁止情報を参照して、ATの実行を許可する制御ループを決定し、決定した制御ループのATを起動するようAT実行部1に指示するインターロック実行部4と、AT起動登録部3の登録内容を参照し、AT未実行の制御ループのATの起動を指示するAT起動指示部5とを備えている。
(もっと読む)
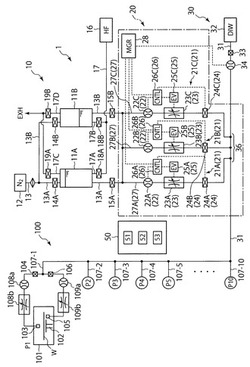
加熱処理制御装置および加熱処理制御方法
【課題】高い加熱効率を図ることができると共に、被加熱物の温度分布の均一化を図ることができる加熱処理制御装置および加熱処理制御方法を提供する。
【解決手段】オフラインPC10は、シミュレーションに必要な被加熱物Wのデータと電気炉1のデータとにより、被加熱物Wの内部を含む全体を均熱加熱するためのシミュレーションを行って、時間ごとの加熱温度を示す加熱温度データとして算出する。次に、制御用PC20は、加熱温度データに応じて加熱手段の出力を制御する。このとき、温度センサからの測定温度データに基づいて推定変動温度データを算出し、この推定変動温度データに応じてヒーターKを制御する。
(もっと読む)
セットアップシステム
【課題】簡単で確実な配線確認が可能になり、セットアップ時間を短縮できるセットアップシステムを提供する。
【解決手段】複数の入出力端子を有するモータ制御装置と、前記モータ制御装置と通信するセットアップ装置と、を備え、前記セットアップ装置が前記入出力端子の状態を設定する設定キーを少なくとも表示させる表示部と、操作入力部と、を備え、前記表示部における表示に基づいて、前記モータ制御装置に対する周辺装置と前記モータ制御装置との配線を確認する配線確認機能を有するセットアップシステムにおいて、前記操作入力部からの前記設定キーへの操作入力により、前記セットアップ装置が前記設定キーに応じた前記出力信号を前記モータ制御装置から出力させるようにした。
(もっと読む)
フィードバック制御回路、フィードバック制御システム
【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
オートチューニング実行装置および方法
【課題】マルチループ制御系において次にオートチューニングを実行すべき未実行ループを効率よく選択する。
【解決手段】オートチューニング実行装置は、制御ループ毎に設けられ、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、AT未実行の制御ループを記憶するAT未実行ループ登録部2と、制御ループ毎に設けられ、ループ間干渉により各制御ループに発生する制御量PVの最大変動量を検出する最大変動量検出部3と、所定の特定処理開始時点において最大変動量検出部3の検出結果とAT未実行ループ登録部2の登録内容とを参照して、最大変動量が規定条件以内でかつ最大になるAT未実行ループを特定する特定部4と、AT未実行ループが特定されたときにこの制御ループのAT実行部1に対してATを起動するよう指示するAT起動部5とを備えている。
(もっと読む)
発電プラントおよび発電プラント制御装置
【課題】蒸気タービン回転数の変動に基づいてガバナ弁を制御する制御機能の試験を的確に安全に行なう。
【解決手段】発電プラント制御装置は、ガバナ弁位置指令信号14を出力するボイラ・タービン協調制御部40と、調整信号21とガバナ弁位置指令信号14とを加算してガバナ弁指令信号22を出力するガバナ制御部41と、を有する。ガバナ制御部41は、定格周波数と蒸気タービンの回転数の実測データとを比較して偏差信号18を出力する減算器17と、偏差信号18に模擬試験信号を加算して調整基礎信号43を出力する試験信号加算部42と、調整基礎信号43に比例処理を行なって調整信号21を出力する比例器20と、調整信号21にガバナ弁位置指令信号14を加算してガバナ弁指令信号22を出力する協調制御加算器23と、を具備する。
(もっと読む)
ロボットおよびその行動制御システム
【課題】上体の運動によって指定タスクを実行しながら、継続的に安定することができるロボット等を提供する。
【解決手段】本発明のロボット1または行動制御システム2によれば、確率遷移モデルにしたがって、腕体の運動状態を表わす「第1状態変数」の時系列的な変化態様が、第1状態変数のうち少なくとも1つがロボット1に指定タスクを実行させるための第1指定運動軌道{r}に追従するように生成される。また、同じく確率遷移モデルにしたがって、上体の運動状態を表わす「第2状態変数」の時系列的な変化態様が、第2状態変数が継続的に安定な動力学的条件を充足するように生成される。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム
【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
51 - 60 / 317
[ Back to top ]