
国際特許分類[G05B11/36]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 自動制御装置 (494) | 電気式 (493) | 特別な特性,例.比例,微分,積分,を得るための装置をもつもの (345)
国際特許分類[G05B11/36]の下位に属する分類
比例特性を得るためのもの
積分特性を得るためのもの (2)
比例と時間依存特性の両方,例.P.I.,P.I.D,を得るためのもの (26)
国際特許分類[G05B11/36]に分類される特許
11 - 20 / 317
制御装置及び方法
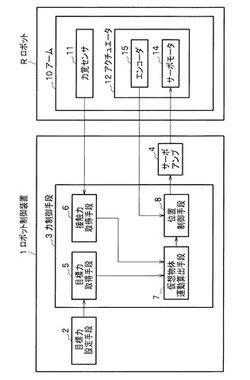
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置

【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
出力制御方法および出力制御装置
【課題】位相制御器を用いずに、分解能を低下させることなく、オン/オフされる操作対象の出力を平滑化することができる、出力制御方法および出力制御装置を提供する。
【解決手段】まず、一定の制御周期Ts内にリレーをオンさせるオン信号を出力するオン期間Tsonおよびリレーをオフさせるオフ信号を出力するオフ期間Tsoffが設定される。次に、制御周期Tsに対するオン期間Tsonの割合Msおよびリレーに向けて出力可能な最小のパルス幅である出力最小期間dTsに基づいて、制御周期Ts内に複数の小時分割周期Tssが設定される。そして、各小時分割周期Tssにおいて、制御周期Tsに対するオン期間Tsonの割合Msに応じた期間にわたって、リレーに向けてオン信号が出力され、残りの期間にわたって、リレーに向けてオフ信号が出力される。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】定常状態において電力使用量が一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないようにする。
【解決手段】電力総和抑制制御装置は、割当総電力の情報を受信する割当総電力入力部(10)と、総電力実測値を取得する総電力実測値入力部(11)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(12)と、使用電力が最大状態に到達していると見なされる状況で総電力実測値が割当総電力より小さい場合に補正係数を大きくする第2の補正係数更新部(13)と、各制御ループの電力余裕が公平な状態に近づくように操作量出力上限値を算出する電力抑制手段(14〜20)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部21と、制御ループ毎に設けられ、操作量を算出して操作量の上限処理を実行する制御部(22−i)を備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(11)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(15〜17)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(21)と、総電力実測値が割当総電力より小さい場合に補正係数HSを大きくする第2の補正係数更新部(22)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部(23)と、制御部(24−i)とを備える。
(もっと読む)
制御装置および方法
【課題】瞬間総エネルギーが一定値を超えないように、かつ温度のオーバーシュートの発生を抑制できる確率が高くなるようにする。
【解決手段】制御装置は、各制御ループLiの昇温電力量PWiを予測する昇温電力量予測部3と、昇温電力量PWiが大きい方から小さい方への順序を各制御ループLiの昇温実行順序として決定する昇温実行順序決定部4と、最初の昇温開始のとき、あるいは昇温対象の制御ループの昇温が進むことにより操作量が下降して電力余裕が生じたと判断されるときに、昇温実行順序に従って昇温対象の制御ループを選択する昇温対象選択部5と、各制御ループLiのヒータに供給する電力の制限操作を行なう電力制限操作部6と、制御ループLi毎に設けられた制御部7−iとから構成される。
(もっと読む)
制御装置、照射装置及び駆動装置
【課題】複数のモータの制御において、同期の高精度化及び制御の高速化の両立に有利な技術を提供する。
【解決手段】複数のモータのそれぞれについてフィードフォワード制御器を備え、前記複数のモータをそれぞれ制御する制御装置であって、前記フィードフォワード制御器の少なくとも1つは、当該フィードフォワード制御器が制御対象とするモータとは異なる少なくとも1つのモータの入出力特性を表す関数を含む、ことを特徴とする制御装置を提供する。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れたアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】最短時間制御を用いると共に、予め、計測されたアクチュエータの制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、制御のための計算を行う計算時刻t0からの経過時間表示で、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出する算出ステップと、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了する制御出力ステップを備えると共に、前記算出ステップを予め設定した時間毎に繰り返して、切替時刻t1と終了時刻t2を算出して更新する更新ステップを備える。
(もっと読む)
制御装置の設計支援装置および設計支援方法、ならびに制御装置
【課題】入力信号間または入出力信号間で信号周期が異なる制御装置を簡易に設計する。
【解決手段】本発明にかかる設計支援装置は、第1センサおよび第2センサからの入力信号に基づいて制御対象へ制御信号を出力する制御装置を設計するための設計支援装置であって、第1センサから入力される第1入力信号の入力周期、第2センサから入力される第2入力信号の入力周期、制御対象への制御信号の出力周期を、ユーザから受け付ける周期入力手段と、制御装置の設計情報をユーザから受け付ける設計情報入力手段と、第1入力信号と第2入力信号の信号周期を制御信号の出力周期にレート変換するフィルタ機能と、レート変換された第1入力信号と第2入力信号を入力として前記設計情報にしたがって制御対象への制御信号を演算するための演算機能と、を含むプログラムコードを出力するコード生成手段と、を備える。
(もっと読む)
11 - 20 / 317
[ Back to top ]