
国際特許分類[G05G5/03]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 機械的構成のみによって特徴づけられた制御装置または制御系 (1,489) | 制御機構の一部の移動を防止しまたは制御する手段,例.制御部材の係止 (445) | 指令位置または基準位置への制御部材の到達を操作者が認識するのを高める手段;操作感覚を与えるもの,例.操作反力を発生させる手段[5,2008.04] (229)
国際特許分類[G05G5/03]に分類される特許
81 - 90 / 229
ペダル装置
【課題】ペダル位置の調整とペダル反力の調整を同時に行えるペダル装置を提供する。
【解決手段】電動モータ13、ネジ機構14およびストッパ部15により構成されるペダル位置・反力調整装置7により、ペダルアーム4を踏み込み方向前後に移動させる。これにより、ペダルアーム4に備えられたカムフォロワ16も移動し、カム17を移動させる。このため、カム17の移動に伴ってバネ19が撓み、バネ19の弾性力がカム17に反力として加えられる。この反力がカム17およびカムフォロワ16を介してブレーキペダル2に加えられる。さらに、ペダル位置・反力調整装置7によってペダルアーム4を移動させれば、反力調整を同時に行うことが可能となる。
(もっと読む)
非接地型力覚提示装置

【課題】物体を把持した状態で手を動かした際の慣性力の感覚を人の手に提示するための力覚提示装置を提供する。
【解決手段】力覚提示装置100は、ガイド部102と保持用取手部104とがT字型に組み合わされている。押圧部110aと110bとは、それぞれ、スライダ112aと112bと
によりガイド部102に沿って移動可能なようにガイド部102に取り付けられている。力覚提示装置100の位置および加速度がマーカ204〜208を用いたモーションキャプチャにより検知される。押圧部110aと110bとが、ユーザの把持に応じて、力覚付与部120に接すると、以後は、力覚付与部120は、押圧部110aと110bとに対して、仮想物体からの手の運動に伴う慣性力に対応した反力を加える。
(もっと読む)
車両におけるパーキングブレーキレバーの配置構造及び操作レバーの配置構造
【課題】パーキングブレーキレバーのロック状態の認識をし易くでき、かつ、パーキングブレーキレバーのハンドルバーにおける収まりも良くすることのできるパーキングブレーキレバーの配置構造を提供する。
【解決手段】パーキングブレーキレバー28を、パーキングブレーキキャリパをロック解除状態とするロック解除位置でレフトハンドルバー20の後方に隣接するハンドル後方アーム部66と、パーキングブレーキキャリパをロック解除状態とするロック解除位置でレフトハンドルバー20の上方に隣接するハンドル上方アーム部67とで構成し、パーキングブレーキレバー28の回動軸44を、ハンドル後方アーム部66においてレフトハンドルバー20の軸方向と略平行に設け、パーキングブレーキレバー28を上方向に引き上げることでパーキングブレーキキャリパをロック状態に操作可能にした。
(もっと読む)
ペダルアセンブリの抵抗機構
ペダルに印加される抵抗力を生成するための抵抗機構及びモジュール(10)。抵抗モジュールは、ペダルによりプランジャーに対して印加される圧縮力に応答して休止及び押下げ位置の間でモジュール内で移動するように適合したプランジャー(70)を含む。プランジャーは、外部カム面を含む。アクチュエータ(100)もまたモジュールの内部に位置し、外部カム面に当接し、プランジャーの移動に応答してプランジャー上の外部カム面に対して滑動するように適合した外部カム面を含む。モジュール内のスプリング(94)は、アクチュエータに当接し、アクチュエータにバイアス力を印加するように適合される。プランジャーとアクチュエータの外部カム面の間の相互作用が、ペダルに印加される抵抗を生成する。 (もっと読む)
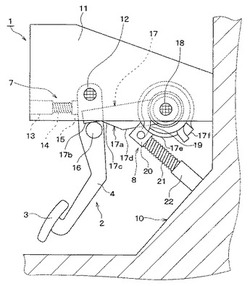
非接触式センサを有するブレーキペダルアッセンブリ
非接触式位置センサを使用し、カム面に載るばね付勢式ローラを活用して従来式ブレーキペダルの感触をシミュレートするアッセンブリが提供されている。ペダルアッセンブリは、カム面を有する細長いブレーキサポートブラケットと、ばね付勢式ローラを有するペダルアームを含んでいる。ばね付勢式ローラアッセンブリは、ペダルアームの内方面又は近傍に取り付けられているか、又はペダルアームの両面に取り付けられている。ローラアッセンブリは、ペダルアームの内側面から伸張する固定脚と、ペダルアームに枢動式に取り付けられている可動脚を含んでいる。ローラに対する付勢力を生成するように、付勢部材がサポートの上を固定脚と可動端の間に伸張している。ペダルが押し下げられると、ローラがサポートブラケットのカム面に沿って動かされ、それによって、従来式ペダルアッセンブリの「感触」が作り出される。 (もっと読む)
入力装置
【課題】1つの操作部で操作感覚の提示とその調整ができる操作性に優れた入力装置を提供する。
【解決手段】軸11の方向に移動可能な移動部と軸11を中心として回転可能な回転部を一体的に備えた操作部10と、移動部を構成する操作ノブ12のストロークを検出するストローク検出器としてのリニアエンコーダ21と回転部を構成する操作ノブ12の回転を検出する回転検出器としてのロータリエンコーダ22を備えた検出部20と、操作部10の操作ノブ12に力を付与する駆動部としてのリニアモータ30と、リニアエンコーダ21の出力に基づいてリニアモータ30を制御し、ロータリエンコーダ22の出力に基づいてリニアモータ30に付与する力を調整する制御部40と、を有して構成する。
(もっと読む)
操作感触可変入力装置
【課題】装置全体の薄型化が容易で回転モータの大きさも制約されにくい操作感触可変入力装置を提供すること。
【解決手段】基台1に回転可能に支持された回転操作体10と、回転操作体10と回転中心線Lを合致させて一体に回転するギヤ部7と、ギヤ部7を介して回転操作体10に外力が付与可能な力覚付与手段8と、回転操作体10の回転位置が検出可能な回転検出手段9(コードホイール14およびフォトインタラプタ15)とを備えた操作感触可変入力装置であって、ギヤ部7を回転操作体10の外周面側に設けると共に、力覚付与手段8の回転モータ11等を回転操作体10の後方からずらした位置に配設する。力覚付与手段8には、回転モータ11のモータ軸11aに固着された第1ギヤ体12と、第1ギヤ体12およびギヤ部7に噛合する第2ギヤ体13とが設けられている。
(もっと読む)
入力装置
【課題】操作部における複数機能の操作感覚の提示とスイッチ動作が可能な操作性に優れた入力装置を提供する。
【解決手段】軸11の方向に移動可能な移動部を備えた操作部10と、移動部を構成する操作ノブ12のストロークを検出するストローク検出器としてのリニアエンコーダ21を備えた検出部20と、操作部10の操作ノブ12に力を付与する駆動部としてのリニアモータ30と、複数の機能を選択し、この選択された前記機能に対応して、リニアエンコーダ21の出力に基づいたリニアモータ30の制御を行なって操作部10に付与する力を制御する制御部40と、を有して構成する。
(もっと読む)
力覚付与型入力装置
【課題】操作レバーを傾動させる操作と押下操作とを連続的に行えると共に、押下操作検出手段の配線が複雑化せず断線の虞もない力覚付与型入力装置を提供すること。
【解決手段】操作レバー2の傾動を検出する傾動操作検出手段10の信号に基づき、回転モータ3が操作レバー2に力覚を付与する力覚付与型入力装置において、自身のスライド移動を操作レバー2の傾動に変換する動作変換部を有するスライダ6と、スライダ6に昇降可能に装着されて側方へ押圧駆動部8aを突設した操作ノブ8と、押圧駆動部8aの昇降動作を検出する押下操作検出手段20、ドーム形状部7aや衝撃吸収部7bを有するラバーシート7とを備えた構成とする。操作ノブ8をスライド操作することで操作レバー2が傾動し、操作ノブ8を押下操作すると、押圧駆動部8aにより押下操作検出手段2のプランジャ21が下動されて検出スイッチ22を駆動すると共に、ドーム形状部7aがクリック感を生起する。
(もっと読む)
力覚提示操作レバー装置
【課題】アクチュエータの不連続な運動に代表される作業機械の状態を力覚として操縦者に対して柔軟に提示するための技術を提供する。
【解決手段】力覚提示操作レバー装置100は、操作レバー1と、前記操作レバー1を傾倒可能に支持する操作レバー支持体2と、前記操作レバー1の傾倒に対する反力として電磁的なトルクを発生させる電磁的手段(DCブラシレスモータ3等)と、前記操作レバー1の傾倒に対する反力として摩擦によるトルクを発生させる摩擦ブレーキ機構7(摩擦ブレーキ手段)と、前記の電磁的手段と摩擦ブレーキ機構7とが、前記操作レバー1の傾倒に対する反力としてのトルクを相互補完的に発生するように、前記の電磁的手段と摩擦ブレーキ機構7の動作を制御する制御手段50と、を備える。
(もっと読む)
81 - 90 / 229
[ Back to top ]