
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
6,321 - 6,330 / 7,349
車両乗上制御システム及び車両乗上制御方法
【課題】車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができるようにする。
【解決手段】道路における段差部を認識する段差部認識処理手段と、車両の予想走行軌跡を算出する予想走行軌跡算出処理手段と、予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかを判断する乗上判定処理手段と、車輪の段差部への乗上げが予測される場合に、車両支持機構の動作を制御する車両支持機構制御処理手段とを有する。予想走行軌跡に基づいて車輪の段差部への乗上げが予測されるかどうかが判断され、乗上げが予測される場合に、車両支持機構の動作が制御されるので、車輪が段差部に乗り上げた際に確実に突上げ感を小さくすることができる。
(もっと読む)
安全走行支援装置

【課題】本発明では地図データとその利用に関する知識(道路知識)を用いて安全誘導を行なうことを課題とする。
【解決手段】上記の課題を解決するため、道路の個々のレーン、停止線、導流線、および車歩道境界(道路縁石)を記載した道路地図データに車両位置を重畳させ、交差点での車両位置を地図にて把握し、さらに道路知識DBによって道路構造物と車両位置の関係を判定し位置関係、距離に基づいて次に取るべき運転情報を運転者に知らせる。
(もっと読む)
交差点認識システム及び交差点認識方法
【課題】車両の交差点への進入を正確に認識することができるようにする。
【解決手段】車両の所定の箇所に取り付けられ、車両の前方を撮影する撮像装置49Fと、照射媒体に対して照射して被照射物までの距離を測定するレーダ装置と、撮像装置49Fから送られた複数のフレームの画像データに対して画像認識処理を行い、交差点を移動する交差車両を車両候補物として検出する画像認識処理手段と、検出された車両候補物の移動変数を算出する移動変数算出処理手段と、移動変数をパラメータとしてレーダ装置に与え、交差車両までの距離を取得する距離取得処理手段とを有する。画像認識処理を行い、車両候補物を検出し、検出された車両候補物の移動変数を算出し、移動変数をパラメータとしてレーダ装置に与えることによって交差車両までの距離を測定する。
(もっと読む)
車両制御装置
【課題】 多段階で一連の運転支援を適切に行う。
【解決手段】 多段階で一連の運転支援を行う車両制御装置において、自車位置検出手段と、地図データ記憶手段と、進行方向前方の注意地点を検出する注意地点検出手段と、自車の走行状態を検出する走行状態検出手段と、走行状態、及び、注意地点に対する自車位置の位置関係に基づいて、少なくとも2段階以上の支援実施タイミングを検出し、各支援実施タイミングでそれぞれ異なる態様の運転支援を行う運転支援手段と、を備え、前記運転支援手段は、前回周期で把握された注意地点に対する自車位置の位置関係が、今回周期で行われたGPS誤差補正等の定期的又は不定期的な自車位置補正処理により大きく変化したことに起因して、第1段階と第2段階の支援実施タイミングが時間的に近くなった場合、第2段階の支援実施タイミングを補正することを特徴とする。
(もっと読む)
安全運転支援装置
【課題】 自車両の進行方向の信号機の赤信号を自動的に検出して停止などに関する制御を行うことができるようにする。
【解決手段】 安全運転支援装置1は、処理装置3と、車両に設けられ進行方向を撮像して撮像画像を出力する前方監視カメラ4とを備えている。前記処理装置3は、前方監視カメラ4による撮像画像から赤色発光部を抽出して信号機の赤色信号を検出する赤信号検出部3aと、前記赤信号が検出されたときに当該信号機が自車両の進路上に存在する信号機であるか否かを判定する進路上信号機判定部3bと、この進路上信号機判定部3bにより自車両の進路上に存在する信号機であることが判定されたときに、車両停止などに関する対応制御を行う対応制御部3dとを備えている。
(もっと読む)
方向情報報知装置
【課題】 音像が定位された音に加えて機械的刺激をヘルメットの装着者に与えることにより、同装着者に認識させたい方向をより明瞭に知覚させることができる方向情報報知装置を提供すること。
【解決手段】 この方向情報報知装置は、自動二輪車BYに適用され、ヘルメット10に装着された運転者用ヘッドホン11及び複数のバイブレータ13、警報装置22、並びに車載ユニット30等からなる。方向情報報知装置は、警報装置から発生される音源信号とその付随情報(例えば、どの方向から障害物が接近するかについての情報)に基づいて同音源信号に基づく警報音の音像を定位させるとともに、その音像の定位位置の方向にあるバイブレータ13の少なくとも一つを振動させる。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】 記録した画像データと新たに取得した画像データとを用いた画面の更新頻度を向上することができる駐車支援方法及び駐車支援装置を提供する。
【解決手段】 ナビゲーション装置1は、カメラ25から画像データを取得し、画像データと撮像位置と対応付けて記録画像データとして画像メモリ15に格納する。また、車両が画像更新距離分移動する度に、撮像位置データに基づいて、進行方向において所定距離以上後方の撮像位置で撮像された記録画像データを読み出す描画処理部18とを備えた。描画処理部18は、車両が画像更新地点に到達した際に、読出した記録画像データの撮像位置と現在位置との相対距離に応じて、記録画像データの合成領域を選択する。そして記録画像データの合成領域の過去画像と、現在画像データの合成領域に基づく現在画像とをディスプレイ6に出力する。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】 記録した画像データと新たに取得した画像データとを用いた画面の更新頻度を向上することができる駐車支援方法及び駐車支援装置を提供する。
【解決手段】 ナビゲーション装置1は、車両位置を特定する制御部3及びGPS受信部7と、車両に設けられたカメラ25から画像データを取得する画像データ取得部10とを備える。さらに、画像データのうち、車両が合成用距離分移動した際に、カメラの死角となる領域のみを抽出し、抽出したデータを撮像位置と対応付けて記録画像データとして画像メモリ15に格納する描画処理部18を備える。描画処理部18は、車両が画像更新距離分移動する度に、進行方向において合成用距離後方の撮像位置で撮像された前記記録データを読出し、記録画像データの合成領域に基づく過去画像と、現在画像データに基づく現在画像とを並べた駐車支援画像をディスプレイ6に出力する。
(もっと読む)
自動車のリアルタイム駐車支援方法と、それに対応する装置
本発明は、初期位置から一つのスペースへの車両の移動を支援する、自動車のリアルタイム駐車支援方法に関し、本方法は、スペース及び前記スペースの周囲の障害物を認識する予備ステップ(20)を含む。本発明による方法では、運転者に伝達されるステアリングホイール角の連続設定ポイント(Cpar)を決定し、前記設定ポイントによって、車両の最適な駐車軌道をモニタリングすることができる。最適な軌道の決定は、車両の旋回中心の第1の軌跡(LG1)と第2の軌跡(LG2)の交点(F)を求めることにより、車両後部の最適な位置を車両の初期位置に従って求め、車両後部の最適な位置は、車両の旋回中心が交点(F)を通過し、車両が最大舵角設定ポイントに従って逆進するときに得られる。 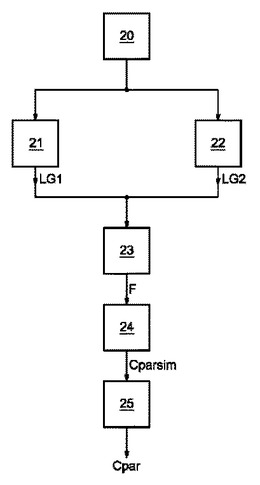 (もっと読む)
(もっと読む)
車両の障害物回避報知装置
【課題】自車両の後側方を走行する車両に自車両が急接近又は衝突してしまうのを防止しつつ、自車両前方の障害物との衝突の回避方向を報知することができる。
【解決手段】障害物回避報知装置は、前方障害物に自車両が衝突する可能性があると判定した場合(ステップS2〜ステップS5)、後方障害物に基づいて、当該前方障害物と自車両との衝突を回避可能な方向を決定し(ステップS20)、その決定に基づいて衝突回避方向を示す情報を撮像画像に重畳して画像表示する(ステップS30)。
(もっと読む)
6,321 - 6,330 / 7,349
[ Back to top ]