
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
61 - 70 / 7,349
車両用外界認識装置およびそれを用いた車両システム
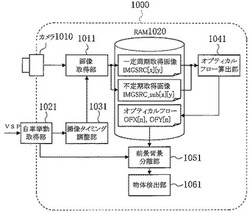
【課題】自車挙動に応じて撮像タイミングを調整することにより、一定の処理周期の中で自車速に応じて効果的、効率的に物体の動きを観測する車両用外界認識装置を提供する。
【解決手段】車両用外界認識装置1000は、カメラ1010等の撮像装置から画像を取り込む画像取得部1011と、カメラから画像を取り込むタイミングを調整する撮像タイミング手段1031とを有し、撮像タイミング手段で設定された一定周期での画像取り込みと、その周期の間に不定期での画像取り込みを行う。自車挙動取得手段1021で自車速を取得し、取得された自車速に応じて不定期での画像取り込みのタイミングを調整し、取り込まれた画像を用いて前景と背景を分離し、前景から衝突の可能性がある物体を検出する。
(もっと読む)
ナビゲーション装置

【課題】装置構成が複雑化したり、装置構成に要する費用が嵩むことを防止しつつ、信号機の位置を精度良く検出する。
【解決手段】ナビゲーション装置10は、車両の加速度の周波数分析から周波数に対応するパワースペクトルを算出する周波数分析部26と、パワースペクトルに基づき渋滞予兆度を算出する渋滞予測部29と、地図データ記憶部11に記憶された信号機の位置情報および現在位置検出部23により取得された車両の現在位置に基づき、信号機が現在位置から所定範囲内に存在するか否かを判定する位置判定部24と、を備える。渋滞予測部29は、予め渋滞予兆度の大小と現在位置から信号機までの距離の長短との相関を示すデータを記憶し、信号機が現在位置から所定範囲内に存在する場合に、渋滞予兆度に応じて現在位置から信号機までの距離を推定する。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
判断支援装置、及び、判断支援方法
【課題】歩行者などの対象物が車両との接触可能性を知ることができるようにすること。
【解決手段】所定時間後における車両の走行エリアを予測する走行エリア予測装置と、予測した前記走行エリアに対応する領域に可視光の照射を行う路面描画装置と、を備える判断支援装置である。このような判断支援装置において、前記走行エリアの予測は、前記車両の速度情報及び前記車両の進行方向の少なくともいずれか1つに基づいて行われることが望ましい。
(もっと読む)
車両の運転支援装置
【課題】自車両の前方側に存在する他車に対して自車両の旋回が行なわれる状況でも、自車両に対する他車の相対位置を高い信頼性で推定することができる運転支援装置を提供する。
【解決手段】自車両2の前方側の監視領域に他車が存在する場合に、自車両2が他車に対して旋回中であるか否かを判断する旋回判断手段7と、旋回判断手段7の判断結果が肯定的である場合に、レーザレーダ3が生成した計測データに基づいて、他車の前端面及び後端面のうちの自車両2に臨む端面と他車の両側面のうちの自車両2に臨む側面とが交差する角部の自車両2に対する相対位置を逐次推定する他車位置推定手段8とを備える。他車と自車両2との接触を回避するための処理を実行する接触回避処理手段9は、旋回判断手段7の判断結果が肯定的である場合に、他車位置推定手段8により推定された相対位置を用いて他車と自車両2との将来の接触の可能性を判断する。
(もっと読む)
運転支援装置
【課題】適切に運転支援を行うことができる運転支援装置を提供することを目的とする。
【解決手段】自車両2の運転を支援する運転支援情報を出力可能である支援装置4と、検知した他車両及び通行者に応じて支援装置4を制御する制御装置5とを備え、制御装置5は、自車両2の走行位置に基づいて、他車両及び通行者の検知領域を変更することを特徴とする。したがって、運転支援装置1は、例えば、不要情報の提示を抑制し、適切に運転支援を行うことができる、という効果を奏する。
(もっと読む)
運転支援システム
【課題】演算処理の負荷を軽減すること。
【解決手段】複数の運転支援情報を外部から受信する通信装置10と、各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置30と、運転支援情報選別装置30で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置40と、を備えること。ここで、通信装置10で受信した運転支援情報が格納される記憶装置20を設け、運転支援情報選別装置30は、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を運転支援装置40に送信する。
(もっと読む)
車線境界線認識装置
【課題】車線境界線の検出精度の改善。
【解決手段】車両の進行方向の路面の画像を所定時間の経過毎に取得し(ステップ210)、その画像に基いて輝度の変化点をエッジ点として抽出する(ステップ220)。更に、抽出されたエッジ点を通る白線候補線を抽出し(ステップ230)、その抽出された白線候補線の中から所定の条件を満足する白線候補線を車線境界線として選択する(ステップ250)。この車線境界線認識装置は、前記抽出されたエッジ点のうちの前記白線候補線が通過するエッジ点の個数をシグナル量Sと見做すとともに、前記抽出されたエッジ点のうちの前記白線候補線が通過しないエッジ点の個数をノイズ量Nと見做し、前記ノイズ量に対する前記シグナル量の割合に応じた値(S/N比)に基づいて算出される画像評価値(ステップ240を参照。)が閾値よりも小さい場合には前記画像に基く前記車線境界線の選択結果を破棄する(ステップ260)。
(もっと読む)
車両周辺監視装置
【課題】 車両に搭載された赤外線カメラにより撮像した画像から監視しようとする対象物を認識し、認識した対象物を車両の運転者に提供する車両周辺監視装置の処理負荷を軽減する。
【解決手段】認識処理部102は、画像に含まれる複数種別の物体(車両、人工構造物、又は歩行者等の対象物)毎に個別認識処理{車両形状認識処理(ステップS13)、人工構造物形状認識処理(ステップS19)、対象物認識処理(ステップS25)}を実行する。除外継続時間設定部106は、前記個別認識処理の結果、認識された物体の画像領域に対して、前記物体の種別に応じて、前記認識処理の効果を継続する除外継続時間T1、T2、T3を設定する。除外継続時間T1、T2、T3が設定された前記画像領域については、解除残時間T1′、T2′、T3′となるまで、当該物体の個別認識処理を行わないようにしたので、処理負荷を軽減することができる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】対象物体までの距離を測定する際に、距離精度を向上させ、従来より遠い距離の対象物でも正確な距離を測定することができる画像処理装置及び画像処理方法を得ること。
【解決手段】一対の撮像素子で同時刻に同方向を撮像した一対の画像の一方の画像から対象物の画像を含む一方画像対象物領域302を抽出する。そして、一方画像対象物領域302を構成する複数の画像構成部分についてそれぞれ対象物画像構成部分304と背景画像構成部分303のいずれであるかの確度である背景度を算出する。そして、背景度を用いて他方の画像501内から一方画像対象物領域302と類似した画像を有する他方画像対象物領域503を抽出して、一方画像対象物領域302と他方画像対象物領域503との視差を算出する。
(もっと読む)
61 - 70 / 7,349
[ Back to top ]