
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,061 - 1,070 / 7,349
車間距離検知装置及び車間距離検知方法
【課題】低コストで車間距離を検知する車間距離検知装置及び車間距離検知方法を提供することを課題とする。
【解決手段】道路上の指定領域内の車両台数を検知する車両台数検知手段2と、特定車両が指定領域に入ってから指定領域内の車両台数が増加した時点までの特定車両の走行距離に基づいて特定車両の後続車両との車間距離を検知又は指定領域内の車両台数が減少してから特定車両が指定領域を出た時点までの特定車両の走行距離に基づいて特定車両の前方車両との車間距離を検知する車間距離検知手段32とを備えることを特徴とする。
(もっと読む)
車両制御装置、車両制御システムおよび管制装置

【課題】車両の走行状態についてのパラメータを適切なものとすることができる車両制御装置を提供すること。
【解決手段】取得した所定の情報に応じて車両の走行状態についての可変なパラメータLを生成することと、パラメータに基づく車両の走行制御あるいは運転操作によるパラメータの実現を支援する運転者に対する情報提供の少なくともいずれか一方を行う所定制御と、を実行可能であり、所定の情報とは、所定制御を実行可能な車両である所定車両CSの割合である。
(もっと読む)
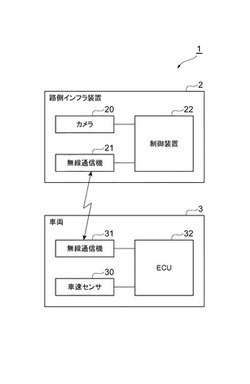
情報管理装置、データ解析装置、信号機、サーバ、情報管理システム、およびプログラム
【課題】信号機付近で撮影された画像内の車両等に関する情報を取得すること。
【解決手段】信号機に取り付けられた撮像装置が取得した撮像画像データに基づき、解析対象の種類、属性、および個数のうち少なくとも1つを判定する判定部と、前記判定部が判定した結果を示す判定結果情報を、当該判定結果情報に基づき前記解析対象の属性に基づき解析結果情報を作成するデータ解析部に出力する出力部とを備えることを特徴とする。
(もっと読む)
車車間通信システム、車載装置、車車間通信方法及びプログラム
【課題】セキュリティ機能を実現するための認証処理を効率的に行なうことが可能な車車間通信技術を提供する。
【解決手段】本実施形態によれば、車両に搭載される車載装置は、無線通信装置と、認証情報取得装置と、情報送受信装置と、コントローラとを備えた構成である。認証情報取得装置は、前記無線通信装置を介して路側装置との間で認証処理を実行し、道路の特定エリアでの正当性を示す認証情報を取得する。情報送受信装置は、前記無線通信装置を介して、他の車両に搭載された他の車載装置との間で前記認証情報を含む情報の送受信を行なう。コントローラは、前記認証情報に基づいて、前記情報送受信装置による前記認証情報以外の情報の送受信を制御する。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両用障害物検出装置
【課題】カメラレンズに付着した異物等を検出対象の範囲から除外して、障害物の検出精度を向上できる「車両用障害物検出装置」を提供することである。
【解決手段】車両の周囲の障害物検出領域を撮影するカメラと、カメラが撮影した障害物検出領域の画像に基づいて車両の周囲に障害物が存在するか否かを判定する障害物判定手段とを備えた車両用障害物検出装置であって、カメラが撮影した障害物検出領域内の変化しない部分である不動領域を検出する不動領域検出手段(S15)と、不動領域検出手段により検出された不動領域から検出不可領域を決定する検出不可領域決定手段(S16)と、検出不可領域決定手段により決定された検出不可領域を障害物検出領域から除外する検出不可領域除外手段(S18)とを備える。
(もっと読む)
歩行方位検出装置および歩行方位検出方法
【課題】歩行者の歩き始めの歩行方位を、素早く高精度に検出することができる歩行方位検出装置を提供すること。
【解決手段】歩行方位検出装置700は、人の歩行方位を検出する装置であって、人の加速度の鉛直成分および水平成分を取得する加速度成分算出部730と、鉛直成分および水平成分の時系列データに基づき、歩行方位を判定する歩行方位算出部770とを有し、歩行方位算出部770は、人が停止状態にあった直後に鉛直成分が極小を呈したとき、加速度の方位を歩行方位とする。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
駐車枠の横線検出方法及び駐車支援装置
【課題】本発明は、輝度画像から縦の白線間の横線を容易に検出すること、駐車枠の後端を検出して適当なタイミングで表示画像を切り換えることを目的としている。
【解決手段】このため、輝度画像を変換した俯瞰画像の2本の白線間の領域に画素行を設定し、各画素行輝度と上下の画素行輝度から算出した差分の最大値が予め設定された値以上の時、差分が最大の画素行位置を2本の白線間の横線位置とする。また、撮像手段と歪み補正手段と画像変換手段と表示手段と表示切換制御手段とを備えた駐車支援装置において、画素行設定手段と、各画素行の輝度と上下の画素行の輝度の差分を算出する差分算出手段と、差分の最大値を抽出する最大値抽出手段と、差分の最大値がしきい値以上かを判定するしきい値判定手段と、差分がしきい値以上の時、差分が最大の画素行位置を縦線間の横線位置とし、駐車枠の後端と認識し、表示切換制御手段で俯瞰画像に切り換える。
(もっと読む)
運転支援装置、情報配信装置、運転支援方法及びコンピュータプログラム
【課題】取得した逆走車両情報に基づく適切な運転の支援を行うことが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】複数の取得元から逆走車両を特定する逆走車両情報を取得し(S1〜S4)、取得した逆走車両情報の取得元の種類を特定し(S6)、特定された取得元の種類に基づいて取得した逆走車両情報の信頼度を判定し(S7)、判定された信頼度に基いて、自車両に対する逆走車両を回避する為の運転の支援を行う(S8〜S10)ように構成する。
(もっと読む)
1,061 - 1,070 / 7,349
[ Back to top ]