
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,031 - 1,040 / 7,349
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
物体検出装置

【課題】夜間または夜間に相当する暗さにおいて物体の誤検出を低減する物体検出装置を提供する。
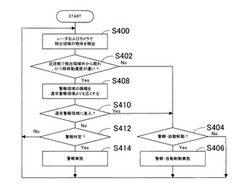
【解決手段】夜間状態ではない場合(S400:No)、物体検出装置は、判定閾値を50%に設定する(S402)。夜間状態の場合(S400:Yes)、物体検出装置は、先行車両および対向車両を除き車両前方の物体を検出すると(S404:Yes)、前照灯をハイビームにするよう指令し(S406)、判定閾値を65%に設定する(S408)。物体を検出しなかった場合(S404:No)、物体検出装置は、前照灯がハイビームであれば(S410:No)、判定閾値を65%に設定し(S408)、前照灯がロービームであれば(S410:Yes)、判定閾値を80%に設定する(S412)。物体検出装置は、カメラとレーダとを合わせた検出信頼度が判定閾値以上であれば(S414:Yes)、警報および自動制動の少なくとも一方を指令する(S416)。
(もっと読む)
画像表示システム、画像処理装置、および、画像処理方法
【課題】駐車スペースの車両の進行方向に沿った距離を精度よく測定できる技術を提供する。
【解決手段】車両のユーザの選択により第1基準位置を設定して、車両の特定部位に基づく第2基準位置と第1基準位置との第1距離を導出し、第1距離が駐車に必要な第2距離以上となった場合にユーザへ報知する。これにより、車両の位置と駐車スペースとの位置関係を明確にして駐車スペースの距離を精度よくユーザへ知らせることができる。
(もっと読む)
走行支援システム
【課題】路側機の支援により効率よく車車間通信させて、走行支援を行う走行支援システムを得る。
【解決手段】車載器110は、自車両の走行情報を形成するカーナビゲーション装置112と、自アドレスを格納した自アドレス格納メモリ113と、走行情報を送信する相手先のアドレスを格納する相手アドレス格納メモリ114とを有し、一方、路側機210は、車載器110の走行情報の発報地点を判断する発報位置判断機能212を有し、路車間通信により、車載器110の走行情報及び車載器110のアドレスを読み取り、発報位置判断機能212により判断された発報地点情報及び相手先のアドレスを車載器110に書き込み、車載器110は、路側機210により書き込まれた発報地点に到達した場合に、相手先のアドレスに、車車間通信により自車両の走行情報を発報するようにした。
(もっと読む)
自車両の右折判定装置
【課題】本発明は、渋滞時にカーブで発進/停止を繰り返す場合や駐車場内で右折を繰り返すような場合に、自車両が右折するとの誤判定を防止することを目的としている。
【解決手段】このため、右折判定手段を備えた自車両の右折判定装置において、位置情報取得手段と、時間計測手段と、右折判定手段により自車両が右折すると判定された回数をカウントする右折カウント手段とを備え、右折判定手段により最初に右折すると判定された時に、位置情報取得手段により自車両の位置情報を取得し、時間計測手段により経過時間を計測し始め、自車両が取得された位置情報に示される位置から予め設定された距離範囲内にあり、かつ、時間計測手段により計測中の経過時間が予め設定された時間内であり、かつ、右折カウント手段によりカウントされた回数が予め設定された回数になった時には、この後自車両が右折すると判定しない。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車載装置及び携帯情報端末に実装されるアプリケーションプログラム
【課題】簡易な構成で携帯情報端末のアプリケーションの車両走行中の使用を適切に規制することができる車載装置等の提供。
【解決手段】本発明は、複数のアプリケーションが搭載された携帯情報端末が接続される車載装置であって、接続された携帯情報端末から送信される情報であって、該携帯情報端末において現在実行中のアプリケーションが車両走行中に使用してもよい属性を有することを示す情報が、継続的に受信できない場合に、車両乗員に対して注意又は警告情報を出力するように構成されることを特徴とする。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
自動車運転中の居眠り予兆検知システム、および自動車運転中の居眠り予兆検知方法
【課題】運転者に対して煩わしくない刺激信号と、煩わしくない応答方法を用いた、確実に居眠り予兆を検知できる自動車運転中の居眠り予兆検知システム、および自動車運転中の居眠り予兆検知方法を提供する。
【解決手段】一定条件の除外期間を除いた期間において、反復的に触覚の刺激信号を送信する手段と、前記触覚の刺激信号に対応した振動を発生する手段と、前記触覚の刺激信号によって起こされた振動に対する運転者からの応答を検出する手段と、前記刺激信号の送信後の実経過時間を知る手段と、前記運転者からの応答がない実時間長に基づいて運転者の覚醒度の確認を判断する手段とで構成する自動車運転中の居眠り予兆検知システムで具体的な構成として、ステアリングホイール1に振動発生装置21,22が配置され、更にステアリングホイール1にシート状の圧力センサ31、32,33,34が配置された自動車運転中の居眠り予兆検知システムとする。
(もっと読む)
物体認識装置
【課題】 物体を識別できない場合においても、物体の移動を予測して危険度の推定を行うことを可能とする物体認識装置を提供する。
【解決手段】 物体認識装置10は、センサ入力部1、物体識別部2及びモデル配置部4を備えている。センサ入力部1は、自車両の周辺に存在する物体を検出する。物体識別部2は、検出された物体の識別を行う。モデル配置部4は、物体識別部2が物体を識別できない場合に、物体の大きさに基づいて、センサ入力部1で検出された物体を含む物体領域に対して物体モデルを配置する。
(もっと読む)
1,031 - 1,040 / 7,349
[ Back to top ]