
国際特許分類[H01L21/68]の内容
電気 (1,674,590) | 基本的電気素子 (808,144) | 半導体装置,他に属さない電気的固体装置 (445,984) | 半導体装置または固体装置またはそれらの部品の製造または処理に特に適用される方法または装置 (183,847) | 製造または処理中の半導体または電気的固体装置の取扱いに特に適用される装置;半導体または電気的固体装置もしくは構成部品の製造または処理中のウエハの取扱いに特に適用される装置 (11,346) | 位置決め,方向決め,または整列のためのもの (1,768)
国際特許分類[H01L21/68]に分類される特許
101 - 110 / 1,768
4軸アライメントステージの原点位置設定方法
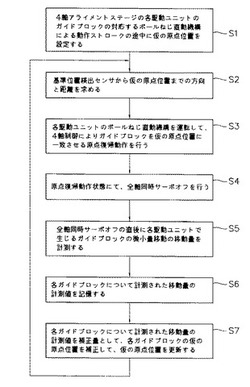
【課題】 4軸制御の原点復帰動作を駆動軸同士の機械的な姿勢の相互干渉を抑えた状態で可能にする。
【解決手段】 XYθガイドとボールねじ直動機構からなる駆動ユニットを4台備えた4軸アライメントステージにて、各駆動ユニットに仮の原点位置を設定して(S1)、それを基準に4軸制御による原点復帰動作を行う(S3)。次いで、全軸同時サーボオフを行い(S4)、その直後に生じる各駆動ユニットのガイドブロックの移動量を計測し(S5)記憶させる(S6)。その後、移動量の計測値を補正量として各駆動ユニットの仮の原点位置を補正し(S7)、補正後の仮の原点位置を基準とする原点復帰動作と、全軸同時サーボオフ直後の移動量の計測及び記憶と、移動量の計測値を補正量とする仮の原点位置の補正を繰り返し、全軸同時サーボオフ直後の移動量が収束したときの仮の原点位置を、4軸制御による実際の原点復帰動作用の原点位置に設定する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法

【課題】2つのステージを異なる経路に沿って露光位置と交換位置との間で移動する。
【解決手段】 ウエハステージWST1に保持されたウエハの露光が終了した際に、ウエハステージWST1が露光位置の−X側に位置する第1帰還経路に沿ってウエハの交換が行われる第1交換位置へ移動され、かつウエハステージWST2に保持されたウエハの露光が終了した際に、ウエハステージWST2が露光位置の+X側に位置する第2帰還経路に沿ってウエハの交換が行われる第2交換位置へ移動される。これにより、ウエハステージWST1,WST2にはそれぞれ−X側及び+X側から配線・配管用のケーブルを取り付けることで、それらのケーブルの縺れを防止することができるとともに、その長さを極力短くすることができる。
(もっと読む)
移動体装置、露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び移動体装置の組立方法。
【課題】運動性能の向上した基板ステージ装置を提供する。
【解決手段】 基板ステージ20は、X軸方向に関する位置を個別に制御可能であってY軸方向に関して互いに分離して配置される第1Xテーブル24aと第2Xテーブル24bとを含み、X軸方向に沿って移動するX粗動ステージ23xと、基板Pを保持し、X粗動ステージ23xに誘導されて少なくともX軸方向に沿って移動する微動ステージ30と、Y軸方向に関して第1Xテーブル24aと第2Xテーブル24bとの間に配置され、微動ステージ30を下方から支持し、微動ステージ30と共に少なくともX軸方向に沿って移動可能な重量キャンセル装置50と、を備える。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】電磁石と吸引ターゲットとの間のギャップの大きさの変動による位置決め精度の低下を防止する。
【解決手段】位置決め装置は、第1部材と第2部材との相対位置を制御するように構成され、前記第1部材に固定された電磁石と、前記電磁石によって吸引されるように前記第2部材に固定された吸引ターゲットと、前記電磁石が発生する磁束値を検出する磁束センサと、前記電磁石と前記吸引ターゲットとの間のギャップの大きさに応じて磁束指令値を補正することによって得られた補正磁束指令値と前記磁束センサによって検出された磁束値との偏差に応じて前記電磁石を駆動する駆動部とを備える。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】物体の位置の測定に有利な技術を提供する。
【解決手段】第1ヘッド112a、112c又は第2ヘッド113aで第1物体に対する第2物体の相対的な位置を測定する第1測定部110と、第1物体に対する第2物体の相対的な位置を求める処理を行う処理部と、を有し、処理部は、第1ヘッド112a、112c及び第2ヘッド113aのうち一方のヘッドで以前に検出された回折格子111a、111b上の位置を他方のヘッドの視野の中心に位置決めした状態で一方のヘッドで以前に検出された回折格子上の位置とは別の位置を一方のヘッドで検出する処理を、一方のヘッドが回折格子の全面を検出するまで繰り返して回折格子の変形量を求める第1処理と、回折格子の変形量に基づいて、第1ヘッド112a、112c又は第2ヘッド113aで測定された第1物体に対する第2物体の相対的な位置を補正する第2処理と、を行う。
(もっと読む)
基板を基板テーブル上にロードする方法、デバイス製造方法、コンピュータプログラム、データキャリア、および装置
【課題】リソグラフィ装置において第1のオブジェクトを第2のオブジェクト上にロードする方法を提供すること。
【解決手段】この方法は、a)第1のオブジェクトを第2のオブジェクト上にロードすること、b)ある時間量だけ待つこと、c)応力緩和アクションを実施することを含む。第1のオブジェクトは基板とすることができ、第2のオブジェクトは基板テーブルとすることができる。また、第1のオブジェクトは基板テーブルとすることができ、第2のオブジェクトは、基板テーブルを支持するサポート構造とすることができる。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
リペア装置のメンテナンス機構
【課題】大型化した装置に対して、メンテナンス時の作業性を向上させる。
【解決手段】リペア対象板が載置されるワークテーブルと、当該ワークテーブルの両側に配置されたガイドレールと、当該各ガイドレールに移動可能に支持されて上記ワークテーブル上に架け渡される門型ステージと、当該門型ステージに上記ガイドレールと直交する方向にスライド可能に支持されて上記ワークテーブル上の上記リペア対象板をリペアするリペアユニットとを備えたリペア装置のメンテナンス機構である。このメンテナンス機構を、上記各ガイドレールにそれぞれ嵌合する足台と、当該各足台に載置されて上記ワークテーブル上に架け渡される天板とから構成した。
(もっと読む)
モータ装置、ステージ装置及び露光装置並びにデバイス製造方法
【課題】コイルユニットの収容部に生じる温度分布を抑制できるモータ装置を提供する。
【解決手段】固定子11と可動子12との一方にコイルユニットCUが設けられ、固定子と可動子との他方に発磁ユニット13,15が設けられる。収容部材31に囲まれた収容空間32にコイルユニットを収容する収容部30と、収容部材の外側に設けられ収容部材との間に気体流動空間40、41を形成する空間形成部35、36と、気体流動空間に気体を流動させる気体流動装置FLとを備える。
(もっと読む)
101 - 110 / 1,768
[ Back to top ]