
国際特許分類[H03H21/00]の内容
電気 (1,674,590) | 基本電子回路 (63,536) | インビーダンス回路網,例.共振回路;共振器 (15,336) | 適応型回路網 (157)
国際特許分類[H03H21/00]に分類される特許
71 - 80 / 157
高速かつ正確な適応制御方法及びシステム

【課題】従来の方法とシステムに付随する不利益や問題の少なくとも一部を実質的に除去または低減する、正確な適応制御システム及び方法を提供するものである。
【解決手段】一実施形態では、高速最急降下法を用いた適応フィルタアーキテクチャにおいてローパスフィルタを備える段階を含む方法を提供する。該方法は、エラー信号を分解する段階と、線形結合器の少なくとも1つの重みパラメータに微少変化を与える段階と、エラー相関ベクトルの変化を測定する段階と、少なくとも1つの傾きを計算する段階とを含み、傾きはローパスフィルタにより処理される。
(もっと読む)
未知系の同定方法

【課題】
IIR型フィルタ又はこれに近い構造のフィルタを用いて未知系を同定する未知系の同定方法であって、従来よりも収束時間が短い未知系の同定方法を提供する。
【解決手段】
本発明に係る未知系の同定方法は、ある未知の系100と同じ又はこれに近い応答をするデジタルフィルタ200を生成するために、前記デジタルフィルタ200に適応フィルタを用い、前記未知の系100と前記デジタルフィルタ200を並列に接続して、前記デジタルフィルタ200に前記未知の系100に入力する入力信号と同じ信号xを入力し、前記未知の系100から出力された信号y(d)と前記デジタルフィルタ200から出力された信号uとの誤差eに基づいて、前記デジタルフィルタ200の係数γが最適な係数になるよう係数更新を行う未知系の同定方法であって、前記デジタルフィルタ200をIIR型フィルタの構造とし、前記デジタルフィルタ200の係数更新にはFIR型フィルタに適用可能な係数更新アルゴリズムを用いる。
(もっと読む)
状態推定装置及び状態推定方法
【課題】推定処理の途中で、必要なモデルを判別して、不要なモデルのカルマンフィルタの処理結果がフィルタ全体の推定精度に与える悪影響を抑制することができるようにする。
【解決手段】統合処理部10がカルマンフィルタ処理部3−1〜3−3から出力された各モデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)のうち、モデル構成判定部8により使用すると判別されたモデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)を、モデル確率計算部6により計算されたモデル確率μk(j)に応じた統合加重で統合する。
(もっと読む)
受信信号等化器
【課題】時間長が短い参照信号によって受信信号の歪みを補償することが可能な受信信号等化器を提供する。
【解決手段】複素受信信号yにフィードフォワードタップ係数による演算を施す構成部と、基準信号sとして選択された受信側参照信号にフィードバックタップ係数による演算を施す構成部とを備える。加算合計部32は、これらの構成部から出力される信号を加算合計して出力する。誤差計算部40は、加算合計部32が出力する信号と受信側参照信号との差異を求め誤差信号eとして出力する。タップ係数算出部34は、複素受信信号yと受信側参照信号を遅延させた信号と誤差信号eに基づいて、フィードフォワードタップ係数およびフィードバックタップ係数を求める。受信側参照信号出力部36が出力する受信側参照信号には補間参照値が挿入されている。
(もっと読む)
同相成分抽出方法及び装置
【課題】信号処理の複雑さを抑えつつ、直接的に両チャンネル間で同相な成分を抽出することを可能とした同相成分抽出方法及び装置を提供する。
【解決手段】
2チャンネルの入力信号X,Yの信号入力部1X,1Yの出力側を、それぞれ適応フィルタ2X,2Y、フィルタ係数生成器3X,3Y及びサンプル遅延器4X,4Yに接続する。時刻kにおける入力信号X(k),Y(k)に適応フィルタ係数WX,WYを畳み込み、得られる信号をZX(k),ZY(k)とする。サンプル遅延器4X,4Yは、入力信号Y(k)を適応フィルタ長Mの半分であるM/2の遅延が施された信号X’(k),Y’(k)を生成する。同相信号としてZ’(k)=(ZX(k)+ZY(k))/2を出力しかつ、X’(k)およびY’(k)からZ’(k)をそれぞれ差し引いた無相関信号XO’(k)とYO’(k)を出力する。
(もっと読む)
信号処理装置、信号処理方法、ならびに、プログラム
【課題】通信路の伝搬状況が時間変動する場合にも環境雑音や他のユーザからの干渉を抑制する適応的な線形フィルタを算出する信号処理装置等を提供する。
【解決手段】信号処理装置において、Nチップのシグネチャを正逆に反転させて1ビットを伝送する送信局の信号を得るための適応線形フィルタを得るため、所望局のシグネチャs[1]および振幅初期値A[1]と、干渉局のシグネチャ推定値s[2],…,s[J]および振幅推定値A[2],…,A[J]と、から、2次計量行列Qを求めて、線形フィルタh[1]を求める。計量行列Qは、s[・],A[・]から求められる線形フィルタ推定値h*と、現在の線形フィルタの値h[1]と、の差に直交行列Uを乗じて微少量δを加算したものを対角成分とする行列であり、必要に応じて更新される。
(もっと読む)
等化装置
【課題】高い精度で等化処理を行い得る等化装置を提供する。
【解決手段】第1のデータDa、トレーニング用データDb(以下、データDb)および第2のデータDcの順で入力される1スロット分の受信データDrを記憶する第1の記憶部2と、第1のデータDaを逆方向で読み出して後方等化処理を行って第1の等化データy(t)を出力する判定帰還型等化器3と、第2のデータDcを時系列方向で読み出して前方等化処理を行って第2の等化データy(t)を出力する判定帰還型等化器4とを備え、各等化器3,4は、受信データDrを遅延させる遅延回路32,72、並びに受信データDrおよび遅延された受信データDrをタップ利得ω(t)で増幅して出力する複数のタップ33,73を備え、複数のタップ33,73におけるセンタータップ33c,73cは、その前段および後段に他のタップが存在するように規定されている。
(もっと読む)
音像制御装置および音像制御方法
【課題】 MDCTなどの重複直交変換による変換係数に対して音像制御情報に基づいて補正を行って得た音声音響信号に歪を生じさせないようにする。
【解決手段】 音像制御装置1においては、音像制御パラメータ決定部11が音声音響信号を定位させるための音像制御情報に基づいて音像制御パラメータを決定する。音像制御部12は、入力された重複直交変換による変換係数を音像制御パラメータに基づいて、位相をずらすなどで、補正する。そして、係数逆変換部13は、補正された変換係数を時間領域の音声音響信号に変換する。合成窓制御部14は、音像制御情報に基づいて合成窓関数を生成し、合成窓重畳部15は、音声音響信号に対して適切な合成窓関数を乗算して、出力信号として歪の低減した音声音響信号を得ることができる。
(もっと読む)
雑音抑圧装置および雑音抑圧方法
【課題】AR係数の推定を必要としないシンプルで雑音抑圧能力が高い、カルマンフィルタに基づく雑音抑圧装置および雑音抑圧方法を提供する。
【解決手段】雑音抑圧処理部150は、AR係数を用いないカルマンフィルタを内蔵している。従来手法が線形予測を用いてAR係数を推定した後、その結果を用いてカルマンフィルタを実行することで雑音抑圧を実現しているのに対し、本手法では、カルマンフィルタのみを用いて雑音抑圧を実現するべく、信号源からのクリアな信号のみを用いて状態方程式を構成し、そのクリアな信号と付加雑音信号を用いて観測方程式を構成することで、高い雑音抑圧を実現している。
(もっと読む)
通信システム
フィルタからアウトプットされる信号内のリンギングを減少するための方法であって、信号をフィルタ内にインプットする工程と、インプット信号の第1の部位をフィルタしてアウトプット信号のフィルタされた部位を生成する工程と、アウトプット信号のフィルタされた部位を解析する工程と、上記解析に基づいて、アウトプット信号のフィルタされた部位にリンギングが存在するかどうか検出する工程と、リンギングが存在すると判定されるとアウトプット信号のその後のフィルタされた部位内のリンギングを減少するようにフィルタ特徴を調整する工程とを含む方法。 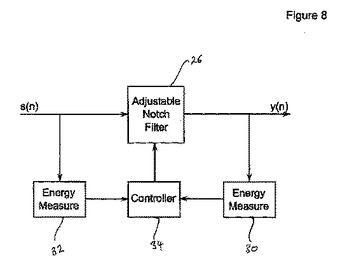 (もっと読む)
(もっと読む)
71 - 80 / 157
[ Back to top ]