
国際特許分類[H04N13/02]の内容
電気 (1,674,590) | 電気通信技術 (544,871) | 画像通信,例.テレビジョン (280,882) | 立体テレビジョン方式;その細部 (5,330) | 画像信号発生装置 (1,116)
国際特許分類[H04N13/02]に分類される特許
11 - 20 / 1,116
立体撮影装置およびそれを用いた携帯端末装置
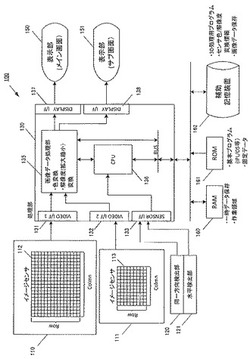
【課題】正面撮影を行うメインカメラと,自分撮影用のサブカメラを利用して静止画像や動画像の立体画像撮影が可能な立体撮影装置およびそれを用いた携帯端末装置を提供する。
【解決手段】画像データ処理部135は、メインカメラ110の画像から構造物を確定し、背景画像からの切り出しを行う。サブカメラ111の画像から構造物位置情報を抽出し、それに基づいて構造物をメインカメラで得られた画像位置から移動する。背景と隠れたオブジェクトを補正する。また、サブカメラ111の画像の画像情報からメインカメラ110で撮影した画像では隠れた部分の画像情報を生成するので、間違いのない補正が可能である。
(もっと読む)
顕微鏡装置

【課題】単一の撮像素子を用いて、試料の像を視差のある2つの像として同時に撮像可能な顕微鏡装置を提供する。
【解決手段】対物レンズ8により集光された試料Sからの光を第1の像として結像させる第1の結像光学系9aおよび第2の像として結像させる第2の結像光学系9bと、第1の結像光学系9aおよび第2の結像光学系9bの焦点位置に配置され、第1の像が結像される第1の撮像領域R1と第2の像が結像される第2の撮像領域R2とを有する撮像素子10とを備える顕微鏡装置1を提供する。
(もっと読む)
ステレオマッチングシステムの前処理装置
【課題】不揮発性メモリーの数を減らし、ステレオカメラのウェイト情報を均一な値として提供することによって、同一性能を維持しながらもハードウェアの大きさ及び価格を減らすことができるステレオマッチングシステムの前処理装置を提供する。
【解決手段】ステレオマッチングシステムの前処理装置は、ステレオカメラの座標情報を保存し、該座標情報を用いて新しいピクセルのアドレスを指定し、該新しいピクセルのアドレスを用いてステレオカメラから入力される左映像及び右映像を矯正する。
(もっと読む)
立体映像撮影システム
【課題】 フォーカスと連動して輻輳角が動作する立体映像撮撮影システムにおいて、フォーカスと輻輳角を、必要に応じて連動と非連動に切換える立体映像撮影システムを提供すること。
【解決手段】 立体映像撮影システムは、一対のレンズ装置と、該一対のレンズ装置による被写体像を撮像するカメラ装置と、該一対のレンズ装置の輻輳角を変更する輻輳角変更手段と、該一対のレンズ装置のフォーカス群の動作に連動して、該一対のレンズ装置の輻輳角を制御する制御手段と、該輻輳角をフォーカス群の動作に連動させる連動状態と連動させない非連動状態とで切換える連動切換手段と、を有する。
(もっと読む)
複眼カメラの制御方法及び制御装置
【課題】 複数の固体撮像素子間の画質の差異を小さくすることを可能にした固体撮像素子の駆動制御方法を提供すること。
【解決手段】 第1の撮像素子と第2の撮像素子と、前記第1、第2の撮像素子の駆動回路と、前記第1、第2の撮像素子からの映像信号のノイズ量を比較するための画像処理回路と、を具え、前記第1の撮像素子を駆動している期間において、前記ノイズ量の比較結果に応じて、第2の撮像素子を駆動することを特徴とする構成とした。
(もっと読む)
表示装置、電子カメラ、表示システム及びカメラシステム
【課題】 本発明は、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供する。
【解決手段】 表示装置は、表示部と、読込部と、立体画像生成部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。立体画像生成部は、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
(もっと読む)
画像符号化方法、画像復号方法、並びにそれらの装置及びプログラム
【課題】デプスマップの符号化において優れた符号化効率を得ることが可能な画像符号化方法を提供する。
【解決手段】本発明の画像符号化方法は、画素毎の視点からの距離を示すデプス値からなるデプスマップを構成する一部の領域であるマクロブロック毎に、画像符号化装置1がデプス予測画像マクロブロックを用いてデプスマップの予測符号化を行う。この画像符号化方法では、画像符号化装置1が、1つのマクロブロックについて、画素毎の輝度値からなるテクスチャ画像のうち上記1つのマクロブロックに対応する領域であるテクスチャ画像マクロブロックの視差ベクトルと、撮影装置間の距離と撮影装置の焦点距離とを含む撮影条件情報とに基づいてデプス値を算出する算出ステップと、画像符号化装置1が、算出したデプス値に基づいてデプス予測画像マクロブロックを生成する生成ステップとを有する。
(もっと読む)
撮像装置
【課題】装置を大型化することなく簡素な構成で被写体の立体画像を取得することができる撮像装置を提供する。
【解決手段】本技術の一実施形態に係る撮像装置は、接眼部を有し、被写体光束を伝送する鏡筒と、前記被写体光束のうち第1の方向に振動する第1の偏光成分を透過させ前記第1の方向と直交する第2の方向に振動する第2の偏光成分を遮光する第1のフィルタ部と、前記被写体光束のうち前記第1の偏光成分を遮光し前記第2の偏光成分を透過させる第2のフィルタ部とを有し、前記被写体光束の光路上に配置された偏光フィルタと、前記接眼部に接続され、前記第1の偏光成分と前記第2の偏光成分とを受光する撮像素子を有する撮像ユニットと、を具備する。
(もっと読む)
3D映像撮影制御システム、3D映像撮影制御方法、およびプログラム
【課題】 撮影条件および鑑賞条件を総合的に考慮し、好適な3D効果を得るため、または安全性を維持するために、一対の撮像装置の位置および方向を制御する3D映像撮影制御システムを提供する。
【解決手段】 3D撮影・放送モデルおよび3D被写体モデルを統合した統合モデルに基づいて、一対の撮像装置の基線長と輻輳角を制御する。基線長決定部6d−1は、統合モデル式1で表わされる関係(撮像装置の基線長と人間両眼の基線長との比率が、引込率に比例する関係)に基づいて基線長を決定し、カメラ制御部6eは、一対の撮像装置が、決定された基線長になるよう、当該一対の撮像装置の位置を移動させる。また、輻輳角制御部2d−2は、統合モデル式2の関係(引込率と撮像装置の画角との掛け算が定数になる関係)に基づいて求められた引込率によって輻輳角を制御し、基線長決定部6d−1は、当該引込率と統合モデル式1に基づいて基線長を決定する。
(もっと読む)
光学機器、画像処理方法およびプログラム
【課題】光軸が互いに異なる複数の撮影光学系を有して高画質な画像を生成することが可能な光学機器を提供すること
【解決手段】撮影光学系6、7の光軸O1、O2上の対応する位置にある光学面9、11に形成された反射防止膜16、17を有する光学機器の各撮影光学系が形成した光学像を光電変換することによって得られる画像は、前記光学面における反射に起因して前記画像に発生したゴースト像14、15を特定する特定処理と、前記特定処理によって特定された前記ゴースト像を各画像から除去する除去処理と、を有する画像処理の対象とされ、前記反射防止膜は、前記特定処理が前記ゴースト像の光学特性の差に基づいて前記ゴースト像を特定することができるように互いに反射特性が異なっている。
(もっと読む)
11 - 20 / 1,116
[ Back to top ]