
トロイダル型無段変速機
【課題】部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易く、しかも変速動作を安定させられる構造を実現する。
【解決手段】トラニオン10dの支持梁部27aに対してスラスト玉軸受29aを構成する外輪30aを、揺動変位可能に支持する。この外輪30aに結合固定した被検出ブラケット35に設けた被検出面38の変位をセンサ42により測定し、前記外輪30aの変位量を測定可能とする。そして、このセンサ42の測定信号により、変速比に関するフィードバック制御を行う。前記トラニオン10dと前記外輪30aとの間に存在する隙間の影響を受けずに、パワーローラ9aの変位を測定できるので、変速動作の安定化を図れる。
【解決手段】トラニオン10dの支持梁部27aに対してスラスト玉軸受29aを構成する外輪30aを、揺動変位可能に支持する。この外輪30aに結合固定した被検出ブラケット35に設けた被検出面38の変位をセンサ42により測定し、前記外輪30aの変位量を測定可能とする。そして、このセンサ42の測定信号により、変速比に関するフィードバック制御を行う。前記トラニオン10dと前記外輪30aとの間に存在する隙間の影響を受けずに、パワーローラ9aの変位を測定できるので、変速動作の安定化を図れる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば車両(自動車)用、建設機械用、航空機等で使用される発電機用、ポンプ等の各種産業機械用の自動変速機として利用する、ハーフトロイダル型のトロイダル型無段変速機の改良に関する。
【背景技術】
【0002】
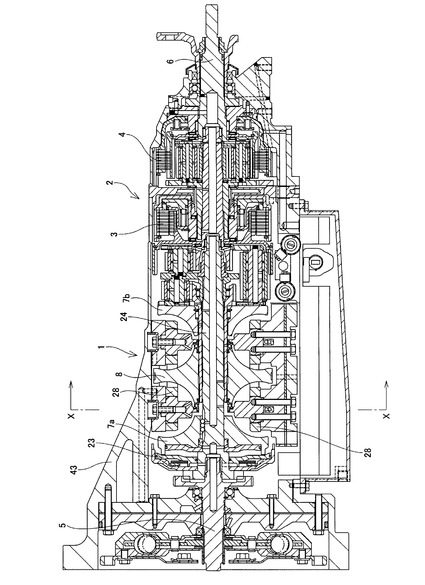
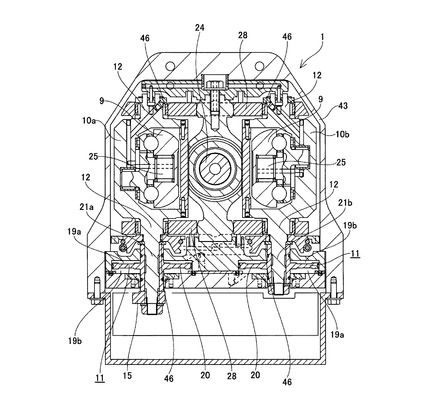
自動車用自動変速装置として使用可能なトロイダル型無段変速機が、従来から広く知られている。又、トロイダル型無段変速機と遊星歯車式変速機とを組み合わせて無段変速装置を構成する事も、特許文献1に記載される等により、従来から広く知られている。この無段変速装置は、図8〜9に示す様に、ダブルキャビティ型のトロイダル型無段変速機1と、前段、中段、後段の3段階のユニットを備えた遊星歯車式変速機2とを、低速用クラッチ3と高速用クラッチ4とを介して組み合わせて成る。そして、これら両クラッチ3、4の断接状態を切り換えると共に、前記トロイダル型無段変速機1の変速比を調節する事により、入力軸5と出力軸6との間の変速比を無限大に調節可能としている。即ち、前記低速用クラッチ3を接続すると共に前記高速用クラッチ4の接続を断った低速モード状態で、前記トロイダル型無段変速機1の変速比を調節する事により、前記入力軸5を一方向に回転させた状態のまま、前記出力軸6を、停止状態を挟んで、両方向に回転させられる様にしている。これに対して、前記高速用クラッチ4を接続すると共に前記低速用クラッチ3の接続を断った高速モード状態で、前記トロイダル型無段変速機1の変速比を増速側に変化させる程、前記無段変速装置全体としての変速比も増速側に変化させる様にしている。
【0003】
上述の様な無段変速装置に組み込まれる前記トロイダル型無段変速機1は、互いに同期して回転する1対の入力ディスク7a、7bと、これら両入力ディスク7a、7b同士の間に、これら両入力ディスク7a、7bに対する相対回転を可能に支持した出力ディスク8と、複数のパワーローラ9、9とを備える。これら各パワーローラ9、9は、それぞれトラニオン10a、10bの内側面に、それぞれ複数個ずつの転がり軸受を介して回転及び前記各ディスク7a、7b、8の軸方向に関する若干の変位を可能に支持した状態で、この出力ディスク8の軸方向両側面と前記両入力ディスク7a、7bの軸方向片側面との間に、それぞれ複数個ずつ挟持されている。そして、前記各パワーローラ9、9は、前記両入力ディスク7a、7bの回転に伴って回転する事により、これら両入力ディスク7a、7bと前記出力ディスク8との間で動力を伝達する。
【0004】
前記トロイダル型無段変速機1の変速比の調節は、前記各トラニオン10a、10bをそれぞれ油圧式のアクチュエータ11、11により、これら各トラニオン10a、10bの両端部に互いに同心に設けた各傾転軸12、12の軸方向に変位させる事により行う。前記各トラニオン10a、10bをこれら各傾転軸12、12の軸方向に変位させると、これら各トラニオン10a、10bに支持された前記各パワーローラ9、9の周面と、前記各ディスク7a、7b、8の軸方向側面との転がり接触部(トラクション部)に作用する接線方向の力の向きが、前記各傾転軸12、12の軸方向に対し変化する。具体的には、前記各トラクション部が中立位置(各トラクション部の中心が、前記各ディスク7a、7b、8の中心軸を含み、前記各傾転軸12、12の中心軸同士を結ぶ仮想直線に対し直交する仮想平面上に存在する状態)からずれると、ずれの方向に応じ、前記各トラニオン10a、10bに、前記各傾転軸12、12を中心として、減速側又は増速側に揺動させる方向の力が加わる。そして、前記各トラクション部の位置が、前記各ディスク7a、7b、8の径方向に関して変化し、前記変速比が変化する。この変速比が所望の値になった状態で、前記各トラクション部を前記中立位置に戻せば、前記トロイダル型無段変速機1の変速比を、前記所望の値に保持できる。
【0005】
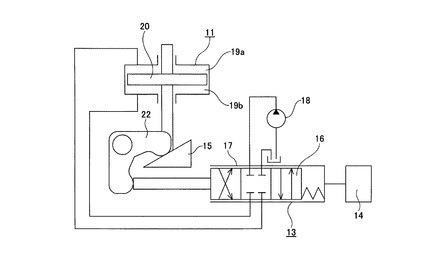
上述の様に、前記トロイダル型無段変速機1の変速比を所望の値に調節し、調節後の値に保持する為の機構に就いて、特許文献2の記載に基づいて説明する。この機構は、図10に示す様に、変速比制御弁13と、ステッピングモータ14と、プリセスカム15とにより構成している。このうちの変速比制御弁13は、スプール16とスリーブ17とを、軸方向の相対変位を可能に組み合わせたもので、これらスプール16とスリーブ17との相対変位に基づき、油圧源18と、前記アクチュエータ11の油圧室19a、19bとの給排状態を切り換える。又、前記スプール16と前記スリーブ17とは、前記各トラニオン10a、10bのうちの何れか1個のトラニオン10aの動きと前記ステッピングモータ14とにより、相対変位させる様にしている。又、前記プリセスカム15は、各トラニオン10aの下端部から連続して、前記各アクチュエータ11、11のピストン20、20に連結したロッド21a、21bのうちの何れか1本(図9の左側)のロッド21aの先端部(図9の下端部)に固定している。そして、この何れか1本のロッド21aの基端部を結合したトラニオン10aの動き、即ち、前記傾転軸12の軸方向の変位及びこの傾転軸12を中心とする揺動変位を、前記プリセスカム15及びリンク腕22を介して前記スプール16に伝達してこのスプール16を軸方向に変位させ、前記ステッピングモータ14により前記スリーブ17を軸方向に変位させる様にしている。
【0006】
前記トロイダル型無段変速機1の変速比を調節する際には、前記ステッピングモータ14により前記スリーブ17を所定位置にまで変位させ、前記変速比制御弁13を所定方向に開く。すると、前記各トラニオン10a、10bに付属の前記各アクチュエータ11、11の油圧室19a、19bに対して圧油が所定方向に給排され、これら各アクチュエータ11、11により前記各トラニオン10a、10bが、それぞれ前記各傾転軸12、12の軸方向に変位する。この結果、これら各トラニオン10a、10bに支持された前記各パワーローラ9、9に関する前記各トラクション部が前記中立位置からずれて、前記変速比が変化し始める。この様にこれら各トラクション部がこの中立位置からずれて変速比が変化し始める瞬間には、前記各トラニオン10a、10bの軸方向変位に伴って、前記変速比制御弁13の開閉状態が、前記所定方向とは逆方向に切り換わる。従って、前記各トラニオン10a、10bは、変速の為に揺動変位を開始し始めた瞬間から、軸方向に関して中立位置に向け移動し(戻り)始める。そして、前記変速比が前記所望の値になった状態で、前記各トラクション部が前記中立位置に戻ると同時に、前記変速比制御弁13が閉じられる。この結果、前記トロイダル型無段変速機1の変速比が、前記所望の値に保持される。
【0007】
ところで、上述の様なトロイダル型無段変速機1により前記両入力ディスク7a、7bと前記出力ディスク8との間で動力を伝達する為には、前記各トラクション部の面圧を十分に確保する必要がある。この為に、前記図8に示した構造には、油圧式の押圧装置23を組み込んでいる。前記無段変速装置の運転時には、前記入力軸5により一方(図8の左方)の入力ディスク7aを、前記押圧装置23を介して回転駆動する。この結果、入力回転軸24の両端部に支持された前記両入力ディスク7a、7bが、互いに近づく方向に押圧されつつ同期して回転する。そして、この回転が、前記各パワーローラ9、9を介して前記出力ディスク8に伝わり、この出力ディスク8から取り出される。
【0008】
上述の様な無段変速装置に組み込まれているか、単独で使用されるかに拘らず、トロイダル型無段変速機1の運転時には、動力の伝達に供される各部材、即ち、前記入力、出力各ディスク7a、7b、8と前記各パワーローラ9、9とが、前記押圧装置23が発生する押圧力に基づいて弾性変形する。そして、この弾性変形に伴って、前記入力、出力各ディスク7a、7b、8が軸方向に変位する。又、前記押圧装置23が発生する押圧力は、前記トロイダル型無段変速機1により伝達するトルクが大きくなる程大きくなり、それに伴って前記各部材7a、7b、8、9の弾性変形量も多くなる。従って、前記トルクの変動に拘らず、前記入力、出力各ディスク7a、7b、8の内側面と前記各パワーローラ9、9の周面との接触状態を適正に維持する為に、前記各トラニオン10a、10bに対してこれら各パワーローラ9、9を、前記各ディスク7a、7b、8の軸方向に変位させる機構が必要になる。上述した従来構造の第1例の場合には、前記各パワーローラ9、9を支持した各支持軸25、25の先半部を、同じく基半部を中心として揺動変位させる事により、前記各パワーローラ9、9を前記軸方向に変位させる様にしている。
【0009】
上述の様な従来構造の第1例の場合、前記各パワーローラ9、9を前記軸方向に変位させる為の構造が複雑で、部品製作、部品管理、組立作業が何れも面倒になり、コストが嵩む事が避けられない。この様な問題を解決する為の技術として特許文献3には、図11〜16に示す様な構造が記載されている。本発明は、この図11〜16に示した従来構造の第2例を改良するものであるから、次に、この従来構造の第2例に就いて説明する。この従来構造の第2例の特徴は、トラニオン10cに対してパワーローラ9aを、入力、出力各ディスク7a、7b、8(図8参照)の軸方向の変位を可能に支持する部分の構造にあり、トロイダル型無段変速機全体としての構造及び作用は、前述の図8〜9に示した従来構造の第1例と同様である。
【0010】
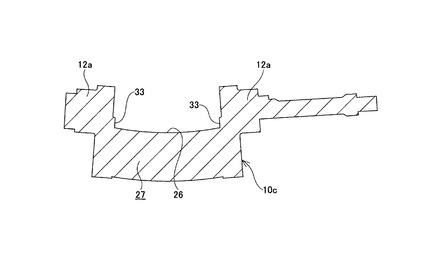
前記従来構造の第2例を構成するトラニオン10cは、両端部に互いに同心に設けられた1対の傾転軸12a、12aと、これら両傾転軸12a、12a同士の間に存在し、少なくとも入力、出力各ディスク7a、7b、8(図8参照)の径方向(図12、14〜16の上下方向)に関する内側(図12、14〜16の上側)の側面を円筒状凸面26とした、支持梁部27とを備える。前記両傾転軸12a、12aは、それぞれラジアルニードル軸受46、46を介して、支持板28、28(図8〜9参照)に、揺動を可能に支持する。
【0011】
又、前記円筒状凸面26の中心軸イは、図12、15〜16に示す様に、前記両傾転軸12a、12aの中心軸ロと平行で、これら両傾転軸12a、12aの中心軸ロよりも、前記各ディスク7a、7b、8の径方向に関して外側(図12、15〜16の下側)に存在する。又、前記支持梁部27とパワーローラ9aの外側面との間に設けるスラスト玉軸受29を構成する外輪30の外側面に、部分円筒面状の凹部31を、この外側面を径方向に横切る状態で設けている。そして、この凹部31と、前記支持梁部27の円筒状凸面26とを係合させ、前記トラニオン10cに対して前記外輪30を、前記各ディスク7a、7b、8の軸方向に関する揺動変位を可能に支持している。
【0012】
又、前記外輪30の内側面中央部に支持軸25aを、この外輪30と一体に固設して、前記パワーローラ9aをこの支持軸25aの周囲に、ラジアルニードル軸受32を介して、回転自在に支持している。更に、前記トラニオン10cの内側面のうち、前記支持梁部27の両端部と1対の傾転軸12a、12aとの連続部に、互いに対向する1対の段差面33、33を設けている。そして、これら両段差面33、33と、前記スラスト玉軸受29を構成する外輪30の外周面とを、当接若しくは近接対向させて、前記パワーローラ9aからこの外輪30に加わるトラクション力を、何れかの段差面33、33で支承可能としている。
【0013】
上述の様に構成する従来構造の第2例のトロイダル型無段変速機によれば、前記パワーローラ9aを前記各ディスク7a、7b、8の軸方向に変位させて、構成各部材の弾性変形量の変化に拘らず、前記パワーローラ9aの周面と前記各ディスク7a、7b、8との接触状態を適正に維持できる構造を、簡単で低コストに構成できる。
即ち、トロイダル型無段変速機の運転時に、入力、出力各ディスク7a、7b、8、各パワーローラ9a等の弾性変形に基づき、これら各パワーローラ9aをこれら各ディスク7a、7b、8の軸方向に変位させる必要が生じると、これら各パワーローラ9aを回転自在に支持している前記スラスト玉軸受29の外輪30が、外側面に設けた部分円筒面状の凹部31と支持梁部27の円筒状凸面26との当接面を滑らせつつ、この円筒状凸面26の中心軸イを中心として揺動変位する。この揺動変位に基づき、前記各パワーローラ9aの周面のうちで、前記各ディスク7a、7b、8の軸方向片側面と転がり接触する部分が、これら各ディスク7a、7b、8の軸方向に変位し、前記接触状態を適正に維持する。
【0014】
前述した通り、前記円筒状凸面26の中心軸イは、変速動作の際に各トラニオン10cの揺動中心となる傾転軸12a、12aの中心軸ロよりも、前記各ディスク7a、7b、8の径方向に関して外側に存在する。従って、前記円筒状凸面26の中心軸イを中心とする揺動変位の半径は、前記変速動作の際の揺動半径よりも大きく、前記両入力ディスク7a、7bと前記出力ディスク8との間の変速比の変動に及ぼす影響は少ない(無視できるか、容易に修正できる範囲に留まる)。
【0015】
図11〜16に示した従来構造の第2例の場合、図8〜9に示した同第1例に比べて、部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易いが、変速動作を安定させる面からは、改良の余地がある。この理由は、前記各支持梁部27を中心とする前記各外輪30の揺動変位を円滑に行わせる為、これら各支持梁部27の両端部分に1対ずつ設けた、前記各段差面33、33同士の間隔Dを、前記各外輪30の外径dよりも少し大きく(D>d)する為である。これら各外輪30、及び、これら各外輪30と同心に支持された前記各パワーローラ9aは、前記間隔Dと前記外径dとの差(D−d)分だけ、前記各支持梁部27の軸方向に変位可能になる。
【0016】
一方、トロイダル型無段変速機を搭載した車両の運転時、前記各パワーローラ9aには前記各ディスク7a、7b、8から、加速時と減速時(エンジンブレーキの作動時)とで逆方向の力(トロイダル型無段変速機の技術分野で周知の「2Ft」)が加わる。そして、この力2Ftにより、前記各パワーローラ9aが、前記各外輪30と共に、前記各支持梁部27の軸方向に変位する。この変位の方向は、前述した各アクチュエータ21、21による各トラニオン10a、10b(図9参照)の変位方向と同じであり、変位量が0.1mm程度であっても、変速動作が開始される可能性がある。そして、この様な原因で変速動作が開始された場合には、運転動作とは直接関連しない変速動作となり、何れ修正されるにしても、運転者に違和感を与える。
【0017】
上述の様にして生じる、運転動作とは直接関連しない変速動作の発生を抑える為には、前記間隔Dと前記外径dとの差(D−d)を僅少に(例えば数十μm程度に)抑える事が考えられる。但し、ハーフトロイダル型のトロイダル型無段変速機の運転時には、トラクション部から前記各パワーローラ9a、前記各外輪30を介して前記各支持梁部27に加わるスラスト荷重により、前記各トラニオン10cが、図17に誇張して示す様に、前記各外輪30を設置した側が凹となる方向に弾性変形する。そして、この弾性変形の結果、前記各トラニオン10c毎に1対ずつ設けた段差面33、33同士の間隔が縮まる。この様な状態でも、これら各段差面33、33同士の間隔Dが前記各外輪30の外径d以下にならない様にする為には、通常状態(前記各トラニオン10cが弾性変形していない状態)での、前記間隔Dと前記外径dとの差を或る程度確保する必要がある。この結果、上述の様な、運転動作とは直接関連しない変速動作が発生し易くなる。
【0018】
一方、前記特許文献3には、支持梁部側に設けた円筒状凸面の一部に係止したアンカ駒と、外輪側の凹部の内面に形成したアンカ溝とを係合させる事により、前記力2Ftを支承する構造が記載されている。又、円筒状凸面と凹部との互いに整合する部分に形成された、それぞれが断面円弧形である転動溝同士の間に複数個の玉を掛け渡して、前記力2Ftを支承する構造も記載されている。但し、前者の構造の場合には、前記アンカ駒を前記支持梁部に、前記力2Ftを支承できる程度の強度及び剛性を確保して支持固定する事が難しく、低コスト化と十分な信頼性確保とを図りにくい。又、後者の場合には、前記力2Ftが大きくなり、前記各玉の転動面と前記各転動溝との転がり接触部の面圧が上昇すると、これら各転動溝の内面に圧痕が形成され、各トラニオンに対して各外輪が揺動変位する際に振動が発生する可能性がある。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開2009−30749号公報
【特許文献2】特開2006−283800号公報
【特許文献3】特開2008−25821号公報
【発明の概要】
【発明が解決しようとする課題】
【0020】
本発明は、上述の様な事情に鑑み、部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易く、しかも変速動作を安定させられる構造を実現すべく発明したものである。
【課題を解決するための手段】
【0021】
本発明のトロイダル型無段変速機は、少なくとも1対のディスクと、複数のトラニオンと、これら各トラニオンと同数のパワーローラと、同じく同数のスラスト転がり軸受と、押圧装置とを備える。
このうちの各ディスクは、それぞれが断面円弧形のトロイド曲面である互いの軸方向片側面同士を対向させた状態で、互いに同心に、相対回転を自在に支持している。
又、前記各トラニオンは、それぞれ、1対の傾転軸と、支持梁部と、1対の段差面とを備える。このうちの両傾転軸は、前記各トラニオンの両端部に、互いに同心に設けている。又、前記支持梁部は、これら両傾転軸同士の間に存在し、少なくとも前記各ディスクの径方向に関する内側の側面を、これら両傾転軸の中心軸と平行でこの中心軸よりも前記各ディスクの径方向に関して外側に存在する中心軸を有する、円筒状凸面としている。又、前記両段差面は、前記支持梁部の両端部に、互いに対向する状態で設けている。それぞれがこの様な構成を有する、前記各トラニオンは、軸方向に関して前記各ディスクの軸方向側面同士の間位置の周方向に関して複数箇所に、これら各ディスクの中心軸に対し捩れの位置にある前記両傾転軸を中心とする揺動変位を自在に設けている。
又、前記各パワーローラは、前記各トラニオンの内側面に、それぞれスラスト転がり軸受を介して回転自在に支持しており、球状凸面としたそれぞれの周面を、前記各ディスクの軸方向片側面にそれぞれ当接させている。
又、前記各スラスト転がり軸受は、前記各トラニオンの支持梁部と前記各パワーローラの外側面との間に設けている。そして、これら各支持梁部側に設けられた外輪と、これら各外輪の内側面に設けられた外輪軌道と前記各パワーローラの外側面に設けられた内輪軌道との間に転動自在に、それぞれ複数個ずつ設けられた転動体とを備える。
又、前記各スラスト転がり軸受の外輪は、これら各外輪の外側面に設けられた凹部と前記各支持梁部の円筒状凸面とを係合させると共に、これら各支持梁部の両端部に設けられた前記各トラニオン毎に1対ずつの段差面同士の間に配置している。そして、これら各トラニオンに対し、前記各支持梁部の軸方向の変位を規制した状態で、前記各ディスクの軸方向に関する揺動変位を可能に支持している。
更に、前記押圧装置は、前記各パワーローラを挟んだ状態で互いに対向する前記各ディスク同士を、互いに近づく方向に押圧する。
【0022】
特に、本発明のトロイダル型無段変速機に於いては、前記各スラスト転がり軸受を構成する外輪のうちの、少なくとも1個の外輪自体、若しくは、この外輪に結合固定されてこの外輪と同期して変位する部材の一部に、前記支持梁部を中心とするこの外輪の揺動方向に対し傾斜した被検出面を設けている。又、運転時にも変位する事のない固定部分に支持したセンサにより、前記支持梁部の軸方向に関する、前記被検出面の変位を検出可能としている。
【0023】
この様な本発明のトロイダル型無段変速機を実施する場合、具体的には、請求項2に記載した発明の様に、変速比制御弁の切り換えに基づいて油圧式のアクチュエータへの圧油の給排を行い、前記各トラニオンをそれぞれの両端部に設けた傾転軸の軸方向に変位させる事で、これら各トラニオンをこれら各傾転軸を中心として揺動変位させ、前記各ディスク同士の間の変速比を変更する、変速比制御手段を備える。又、前記変速比制御弁は、スプールとスリーブとの軸方向に関する相対変位に基づいて油圧回路を切り換え、前記各トラニオン毎に設けた油圧式のアクチュエータを構成するピストンを挟んで設けた1対の油圧室に圧油を給排するものとする。そして、前記スプールと前記スリーブとのうちの何れか一方の部材を、変速比設定用の第一電動アクチュエータにより軸方向に変位させ、同じく他方の部材を、前記センサの検出信号に基づいて制御される、フィードバック用の第二電動アクチュエータにより軸方向に変位させる。
【0024】
又、好ましくは、請求項3に記載した発明の様に、前記外輪を揺動変位可能に支持した前記支持梁部を緩く(この支持梁部を中心とするこの外輪の揺動変位を可能として)跨ぐ状態でこの外輪に、アーチ状の被検出ブラケットを支持固定する。そして、この支持梁部の軸方向に関して、この被検出ブラケットの片側面に、前記被検出面を設ける。
【発明の効果】
【0025】
上述の様に構成する本発明のトロイダル型無段変速機によれば、部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易く、しかも変速動作を安定させられる構造を実現できる。
このうちのコスト低廉化は、前述の図11〜16に示した従来構造の第2例と同様の理由により、図り易い。
【0026】
又、変速動作の安定化は、外輪自体若しくはこの外輪に結合固定された部材の一部に設けた被検出面の変位を検出する事により図れる。この外輪は、トラニオンの支持梁部の軸方向に関し、パワーローラと同期して変位する為、この外輪がこの支持梁部の軸方向に変位しても、この軸方向に関する、前記パワーローラの位置を正しく検出できる。言い換えれば、従来構造の様に、トラニオンを介してパワーローラの位置を測定する場合の様に、これらトラニオンとパワーローラとの間に存在する隙間が、このパワーローラの位置測定に関する誤差に結び付く事はない。
【0027】
この為、例えば請求項2に記載した発明の様に、センサにより検出した前記外輪の姿勢を表す信号に基づいて、変速比制御弁の切り換えを行えば、前記トラニオンと前記パワーローラとの間に存在する隙間に拘らず、トロイダル型無段変速機の変速比を精度良く調節できる。
更に、請求項3に記載した発明の様に、アーチ状の被検出ブラケットを前記外輪に対し、支持梁部を跨ぐ状態で支持固定すれば、比較的簡単で、しかもセンサを設置し易い構造で、前記外輪の変位を求められる構造を実現できる。しかも、トロイダル型無段変速機を組み立てる以前の状態でも、前記トラニオンと前記外輪とが分離する事を防止できる。この為、これらトラニオン及び外輪を含む部分をサブアッセンブリユニットとして取り扱う事ができて、トロイダル型無段変速機の組立性の向上を図れる。
【図面の簡単な説明】
【0028】
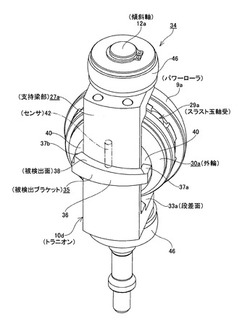
【図1】本発明の実施の形態の第1例を示す、トラニオンとスラスト玉軸受とパワーローラとを取り出して、各ディスクの径方向外側から見た斜視図。
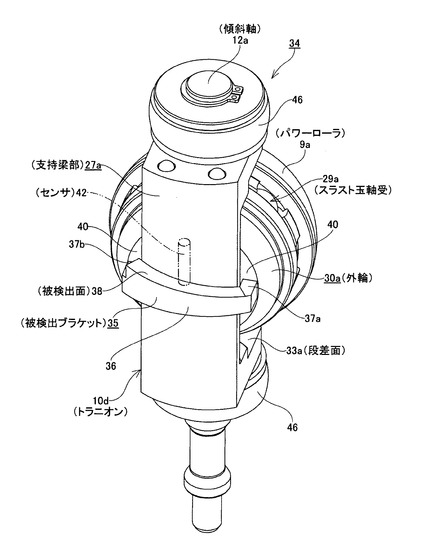
【図2】同じく周方向且つ径方向に関して少し内方から見た斜視図。
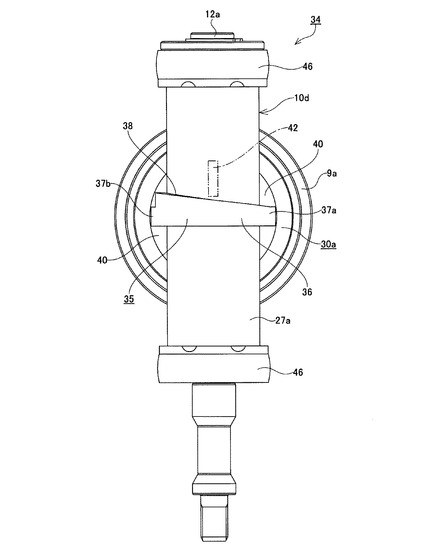
【図3】同じく径方向外方から見た正投影図。
【図4】同じく周方向から見た正投影図。
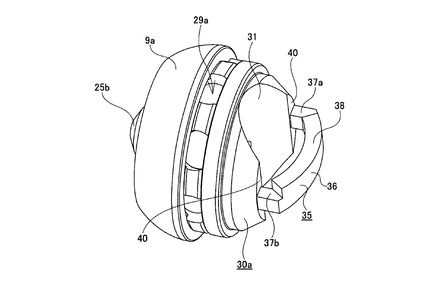
【図5】同じくスラスト玉軸受とパワーローラとを取り出して、各ディスクの径方向外側から見た斜視図。
【図6】同じく異なる角度から見た斜視図。
【図7】スラスト玉軸受を構成する外輪と被検出ブラケットとを結合する前の状態を、図6と円周方向に関して異なる方向から見た状態で示す斜視図。
【図8】従来構造の第1例を示す断面図。
【図9】図8のX−X断面図。
【図10】変速比制御の為の油圧制御装置部分の略断面図。
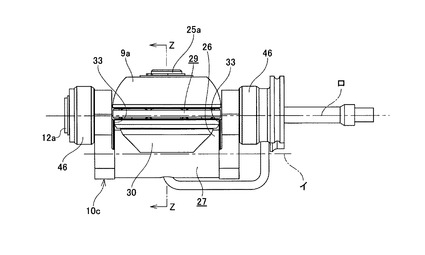
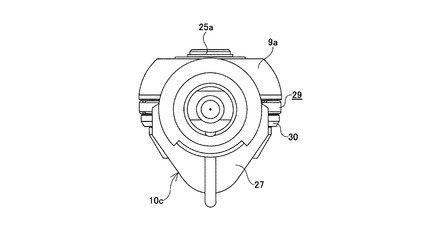
【図11】従来構造の第2例を示す、スラスト玉軸受を介してパワーローラを支持したトラニオンを、各ディスクの径方向外側から見た斜視図。
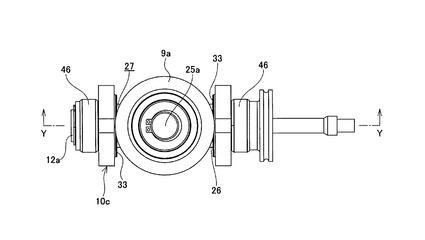
【図12】同じく、ディスクの周方向から見た状態で示す正投影図。
【図13】図12の上方から見た平面図。
【図14】図12の右方から見た側面図。
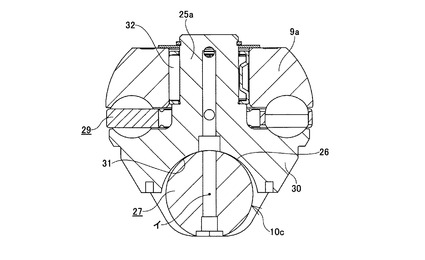
【図15】図13のY−Y断面図。
【図16】図12のZ−Z断面図。
【図17】パワーローラから加わるスラスト荷重に基づいてトラニオンが弾性変形した状態を誇張して示す、図15と同方向から見た断面図。
【発明を実施するための形態】
【0029】
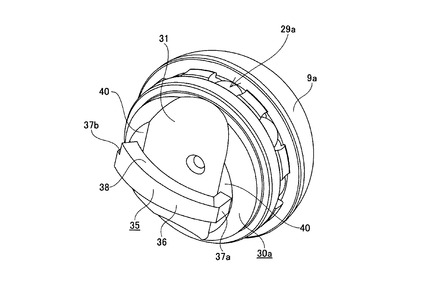
図1〜7は、本発明の実施の形態の1例を示している。尚、本例の特徴は、トラニオン10dに対してパワーローラ9aを、スラスト荷重を支承しつつ回転自在に支持する為のスラスト玉軸受29aを介して、前記トラニオン10dの支持梁部27aに対し揺動変位可能に支持した構造で、前記パワーローラ9aの変位を、前記スラスト玉軸受29aを構成する外輪30aの変位として測定する点にある。トロイダル型無段変速機全体としての構成は、前述の図8〜9に示した構造を含めて、従来から広く知られているトロイダル型無段変速機と同様である。又、前記トラニオン10dの支持梁部27aに対して前記スラスト玉軸受29aを構成する外輪30aを揺動変位可能に支持する為の構造は、基本的には、前述の図11〜16に示した従来構造の第2例と同様である。就いては、前述した、或いは特許文献1〜3に記載される等により従来から広く知られている部分の構造及び作用に就いては、図示並びに説明を、省略若しくは簡略にし、以下、本例の特徴部分を中心に説明する。
【0030】
トロイダル型無段変速機は、それぞれがトラニオン10dとパワーローラ9aとをスラスト玉軸受29aを介して組み合わせて成る、複数組のパワーローラユニット34を備える。これら各パワーローラユニット34の仕様は、前記トラニオン10dと前記パワーローラ9aとの相対変位に結び付く仕様に関する限り、各組で同じとする。具体的には、少なくとも次述する(1)〜(3)の仕様を同じとし、前記トロイダル型無段変速機の運転時に、前記トラニオン10dと前記パワーローラ9aとを、総てのパワーローラユニット34同士の間で、同じだけ相対変位させる。この理由は、何れか1個のトラニオン10dの動き(軸方向の変位量と傾転角度との合成値)をフィードバックして、総てのトラニオン10dの動きを制御する為である。この点は、前述した従来構造の場合に、複数のトラニオン10a、10bのうちの何れか1個のトラニオン10aにのみプリセスカム15(図9参照)を設置し、この何れか1個のトラニオン10aの動きを変速比制御弁13(図10参照)にフィードバックして、総てのトラニオン10a、10bの動きを制御するのと同様である。
【0031】
(1) 各トラニオン10dにそれぞれ1対ずつ形成した段差面33a、33a同士の間隔Dと、前記外輪30aのうちでこれら両段差面33a、33a同士の間に配置される部分の、前記支持梁部27aの軸方向に関する寸法dとの差「D−d」
この差「D−d」を同じにする事は、トロイダル型無段変速機の運転時に、総てのパワーローラユニット34で、前記各トラニオン10dに対して前記各パワーローラ9a(を支持したスラスト玉軸受29aの外輪30a)を、前記支持梁部27aの軸方向に関して同じだけ変位させる為に重要である。図示の例では、前記外輪30aの外周面形状を単なる円形としているので、この外輪30aの外径が、前記軸方向に関する寸法dとなる。これに対して、この外輪30aの外周面の径方向反対側2個所位置に、前記両段差面33a、33aとの当接部の面圧を低く抑える為に、これら両段差面33a、33aと対向する、互いに平行な1対の平坦面を形成する場合がある。この様な場合には、これら両平坦面同士の間隔が、前記軸方向に関する寸法dとなる。
【0032】
(2) 前記各トラニオン10dの支持梁部27aの剛性
前述の図17により説明した様に、トロイダル型無段変速機の運転時に前記各トラニオン10dは、前記各支持梁部27aの内側面側が凹となる方向に弾性変形し、前記両段差面33a、33a同士の間隔Dが縮まる。前記各パワーローラユニット34同士の間で、前記各支持梁部27aの弾性変形量、延いては、前記間隔Dの変化量が異なると、前記各パワーローラユニット34同士の間で、前記各トラニオン10dに対する前記各パワーローラ9aの変位量に差が生じる。この様な差が生じない様にする為に、前記各支持梁部27aの剛性、特に、各ディスクの径方向に関する曲げ剛性を同じとする事が重要になる。
【0033】
(3) 前記各スラスト玉軸受29aのラジアル剛性
トロイダル型無段変速機の運転時に前記各パワーローラ9aには、前述した様に、2Ftと呼ばれる力が加わる。この力2Ftは、前記各スラスト玉軸受29aを介して前記各トラニオン10dに設けた何れかの段差面33aにより支承する。この際、前記力2Ftは前記各スラスト玉軸受29aに対し、ラジアル方向に加わる。これら各スラスト玉軸受29aは、スラストアンギュラ型の玉軸受であり、スラスト荷重に加えてラジアル荷重も支承できる。但し、ラジアル荷重に基づいて、前記各パワーローラ9aと前記各外輪30aとがラジアル方向(各ディスクの回転方向)に、僅かとは言え変位する事は避けられない。後述する様に、本例の構造で変速比制御の為にフィードバックするのは、前記各外輪30aのうちの何れか1個の外輪30aの変位量であるのに対して、実際に変速に関係する変位は、前記各パワーローラ9aの変位量である。そこで、前記各スラスト玉軸受29aを構成する玉の数、直径、接触角を、これら各スラスト玉軸受29a同士の間で互いに同じとして、これら各スラスト玉軸受29aのラジアル剛性を互いに同じとする。
【0034】
上述の様に、前記トラニオン10dと前記パワーローラ9aとの相対変位に結び付く仕様を互いに同じとした複数組のパワーローラユニット34のうち、何れか1個のパワーローラユニット34に組み込んだスラスト玉軸受29aを構成する外輪30aに、アーチ状の被検出ブラケット35を支持固定している。この被検出ブラケット35は、被検出部36と、この被検出部36の両端部から互いに同じ方向に折れ曲がった1対の脚部37a、37bとから成る。この被検出部36は、前記被検出ブラケット35を前記外輪30aに支持固定した状態で、前記トラニオン10dの両端部に互いに同心に設けた傾転軸12aの中心軸と同心の部分円弧状であり、片側面を被検出面38としている。この被検出面38は、前記傾転軸12aの中心軸をその中心とする円周方向に関し傾斜した傾斜面であり、前記パワーローラユニット34を組み立てた状態で、円周方向に関する位置変化に伴って、前記支持梁部27aの軸方向位置が変化する。
【0035】
上述の様な被検出ブラケット35は、前記両脚部37a、37bの先端面に突設した円柱状の突起39、39を、前記外輪30aの外側面のうちの凹部31の両側部分に存在する肩部40、40に形成した、円形の凹孔41、41に圧入する事で、前記外輪30aの外側面の所定位置に支持固定している。尚、この外輪30aに前記被検出ブラケット35を支持固定するのに先立って、この外輪30aの凹部31と前記支持梁部27aの円筒状凸面26aとを係合させておく(この外輪30aと前記トラニオン10dとを組み合わせておく)。又、この外輪30aに前記被検出ブラケット35を支持固定した状態で、この被検出ブラケット35と前記支持梁部27aとの間には、前記トロイダル型無段変速機の運転時に各部材の弾性変形に基づく、この支持梁部27aに対する前記外輪30aの揺動変位を許容できるだけの隙間を介在させる。
【0036】
尚、上述の様に、前記外輪30aと前記トラニオン10dとを組み合わせると共に、この外輪30aに前記被検出ブラケット35を支持固定した状態では、トロイダル型無段変速機を組み立てる以前の状態でも、前記トラニオン10dと前記外輪30aとが分離する事を防止できる。又、この外輪30aと、前記スラスト玉軸受29aの他の構成部材及び前記パワーローラ9aとは、この外輪30aと一体の支持軸25bの先端部に係止した止め輪44及びワッシャ45により非分離に組み合わされている。この為、前記トラニオン10d及び前記外輪30aを含む、前記パワーローラユニット34部分を、非分離に組み合わされたサブアッセンブリユニットとして取り扱う事ができて、トロイダル型無段変速機の組立性の向上を図れる。
【0037】
上述の様な被検出ブラケット35を組み込んだ、前記パワーローラユニット34は、この様な被検出ブラケット35を備えていない、他のパワーローラユニットと共に、例えば前述の図8〜9に示す様に、入力ディスク7a、7bと出力ディスク8との間に組み込んで、トロイダル型無段変速機1を構成する。そして、前記被検出ブラケット35とセンサ42との組み合わせにより、前記パワーローラユニット34を構成する前記外輪30aの変位量を求め、この変位量を表す信号に基づいて、前記トロイダル型無段変速機1の変速比を、フィードバック制御により規制する様にしている。このフィードバック制御により、前記トロイダル型無段変速機1の構成各部材の弾性変形に基づいてこのトロイダル型無段変速機1の変速比が目標値からずれる、所謂トルクシフトを補正できる等、高精度の変速比制御を行える。尚、前記センサ42は、前記トロイダル型無段変速機1を収納したケーシング43(図8、9参照)の内面、或いはこのケーシング43内に支持固定されたブラケット等、前記トロイダル型無段変速機1の運転時にも変位する事のない部分に支持している。
【0038】
前記センサ42の検出信号は、例えば前述の図10に示した変速比制御の為の油圧制御装置で、変速比制御弁13のスプール16を軸方向に所定量(前記外輪30aの変位量に見合う分だけ)変位させる為に利用する。即ち、前記図10に示した従来構造の場合には、パワーローラを支持したトラニオンの変位を機械的に前記スプール16に伝達する様にしていた。この様な構造では、前述の図11〜16に示した構造の場合に、変速比制御が不安定になる事は、前述した通りである。これに対して、本例の場合には、前記トラニオン10dの変位ではなく、前記外輪30aの変位を測定している。この外輪30aの変位量と前記パワーローラ9aとの変位量は、全く同じではないが、その差は無視できる程に僅かである。従って、前記外輪30aの変位に基づいて前記変速比制御弁13のスプール16を変位させれば、前記トロイダル型無段変速機1の変速比制御を安定して行える。この変速比制御が、段差面33a、33a同士の間隔Dと、前記外輪30aのうちでこれら両段差面33a、33a同士の間に配置される部分の寸法dとの差「D−d」の大小に影響される事はない。但し、総てのパワーローラユニット34同士の間で、この差「D−d」が等しい必要がある。
【0039】
尚、前記センサ42の出力信号に基づいて前記スプール16を変位させる為には、前記図10に示した構造で、変速比設定用のステッピングモータ14と別に、フィードバック制御用のステッピングモータを設ける。そして、この変速比設定用のステッピングモータ14が、送りねじ機構等の直動機構により前記変速比制御弁13のスリーブ17を軸方向に変位させるのと同様に、前記フィードバック制御用のステッピングモータにより、前記スプール16を軸方向に変位させる。
【産業上の利用可能性】
【0040】
センサの出力信号に基づいてトロイダル型無段変速機の変速比を制御する構造は、図示の様な構造に限定されない。又、図示の構造の様に、変速比設定用のステッピングモータ14とフィードバック制御用のステッピングモータとにより、変速比制御弁13のスプール16とスリーブ17とをそれぞれの軸方向に変位させる構造に於いて、各ステッピングモータにより変位させる部材16、17を逆にする事もできる。
【0041】
又、外輪30aの変位を測定する為の被検出ブラケット35の設置位置に関しても、図示の様にこの外輪30aの中央位置に限らず、上端位置や下端位置としても良いし、センサの設置が可能であれば、外輪の一部に、直接被検出面を設ける事もできる。
更に、センサの構造は、変位量を精度良く測定できるものであれば、非接触式、接触式の何れも採用可能である。前記外輪30aの揺動変位に拘らず、十分な耐久性を確保する為には、非接触式のセンサが好ましい。一方、トロイダル型無段変速機の運転時には、センサの設置部分に、トラクションオイルの飛沫が多量に浮遊する状態となるので、光電式、静電容量式等の非接触式のセンサでは、測定値の信頼性を確保できない可能性がある。この様な場合には、接触式のセンサを利用する事が好ましい。
【符号の説明】
【0042】
1 トロイダル型無段変速機
2 遊星歯車式変速機
3 低速用クラッチ
4 高速用クラッチ
5 入力軸
6 出力軸
7a、7b 入力ディスク
8 出力ディスク
9、9a パワーローラ
10、10a、10b、10c、10d トラニオン
11 アクチュエータ
12、12a 傾転軸
13 変速比制御弁
14 ステッピングモータ
15 プリンセスカム
16 スプール
17 スリーブ
18 油圧源
19a、19b 油圧室
20 ピストン
21a、21b ロッド
22 リンク腕
23 押圧装置
24 入力回転軸
25、25a、25b 支持軸
26、26a 円筒状凸面
27、27a 支持梁部
28 支持板
29、29a スラスト玉軸受
30、30a 外輪
31 凹部
32 ラジアルニードル軸受
33、33a 段差面
34 パワーローラユニット
35 被検出ブラケット
36 被検出部
37a、37b 脚部
38 被検出面
39 突起
40 肩部
41 凹孔
42 センサ
43 ケーシング
44 止め輪
45 ワッシャ
46 ラジアルニードル軸受
【技術分野】
【0001】
この発明は、例えば車両(自動車)用、建設機械用、航空機等で使用される発電機用、ポンプ等の各種産業機械用の自動変速機として利用する、ハーフトロイダル型のトロイダル型無段変速機の改良に関する。
【背景技術】
【0002】
自動車用自動変速装置として使用可能なトロイダル型無段変速機が、従来から広く知られている。又、トロイダル型無段変速機と遊星歯車式変速機とを組み合わせて無段変速装置を構成する事も、特許文献1に記載される等により、従来から広く知られている。この無段変速装置は、図8〜9に示す様に、ダブルキャビティ型のトロイダル型無段変速機1と、前段、中段、後段の3段階のユニットを備えた遊星歯車式変速機2とを、低速用クラッチ3と高速用クラッチ4とを介して組み合わせて成る。そして、これら両クラッチ3、4の断接状態を切り換えると共に、前記トロイダル型無段変速機1の変速比を調節する事により、入力軸5と出力軸6との間の変速比を無限大に調節可能としている。即ち、前記低速用クラッチ3を接続すると共に前記高速用クラッチ4の接続を断った低速モード状態で、前記トロイダル型無段変速機1の変速比を調節する事により、前記入力軸5を一方向に回転させた状態のまま、前記出力軸6を、停止状態を挟んで、両方向に回転させられる様にしている。これに対して、前記高速用クラッチ4を接続すると共に前記低速用クラッチ3の接続を断った高速モード状態で、前記トロイダル型無段変速機1の変速比を増速側に変化させる程、前記無段変速装置全体としての変速比も増速側に変化させる様にしている。
【0003】
上述の様な無段変速装置に組み込まれる前記トロイダル型無段変速機1は、互いに同期して回転する1対の入力ディスク7a、7bと、これら両入力ディスク7a、7b同士の間に、これら両入力ディスク7a、7bに対する相対回転を可能に支持した出力ディスク8と、複数のパワーローラ9、9とを備える。これら各パワーローラ9、9は、それぞれトラニオン10a、10bの内側面に、それぞれ複数個ずつの転がり軸受を介して回転及び前記各ディスク7a、7b、8の軸方向に関する若干の変位を可能に支持した状態で、この出力ディスク8の軸方向両側面と前記両入力ディスク7a、7bの軸方向片側面との間に、それぞれ複数個ずつ挟持されている。そして、前記各パワーローラ9、9は、前記両入力ディスク7a、7bの回転に伴って回転する事により、これら両入力ディスク7a、7bと前記出力ディスク8との間で動力を伝達する。
【0004】
前記トロイダル型無段変速機1の変速比の調節は、前記各トラニオン10a、10bをそれぞれ油圧式のアクチュエータ11、11により、これら各トラニオン10a、10bの両端部に互いに同心に設けた各傾転軸12、12の軸方向に変位させる事により行う。前記各トラニオン10a、10bをこれら各傾転軸12、12の軸方向に変位させると、これら各トラニオン10a、10bに支持された前記各パワーローラ9、9の周面と、前記各ディスク7a、7b、8の軸方向側面との転がり接触部(トラクション部)に作用する接線方向の力の向きが、前記各傾転軸12、12の軸方向に対し変化する。具体的には、前記各トラクション部が中立位置(各トラクション部の中心が、前記各ディスク7a、7b、8の中心軸を含み、前記各傾転軸12、12の中心軸同士を結ぶ仮想直線に対し直交する仮想平面上に存在する状態)からずれると、ずれの方向に応じ、前記各トラニオン10a、10bに、前記各傾転軸12、12を中心として、減速側又は増速側に揺動させる方向の力が加わる。そして、前記各トラクション部の位置が、前記各ディスク7a、7b、8の径方向に関して変化し、前記変速比が変化する。この変速比が所望の値になった状態で、前記各トラクション部を前記中立位置に戻せば、前記トロイダル型無段変速機1の変速比を、前記所望の値に保持できる。
【0005】
上述の様に、前記トロイダル型無段変速機1の変速比を所望の値に調節し、調節後の値に保持する為の機構に就いて、特許文献2の記載に基づいて説明する。この機構は、図10に示す様に、変速比制御弁13と、ステッピングモータ14と、プリセスカム15とにより構成している。このうちの変速比制御弁13は、スプール16とスリーブ17とを、軸方向の相対変位を可能に組み合わせたもので、これらスプール16とスリーブ17との相対変位に基づき、油圧源18と、前記アクチュエータ11の油圧室19a、19bとの給排状態を切り換える。又、前記スプール16と前記スリーブ17とは、前記各トラニオン10a、10bのうちの何れか1個のトラニオン10aの動きと前記ステッピングモータ14とにより、相対変位させる様にしている。又、前記プリセスカム15は、各トラニオン10aの下端部から連続して、前記各アクチュエータ11、11のピストン20、20に連結したロッド21a、21bのうちの何れか1本(図9の左側)のロッド21aの先端部(図9の下端部)に固定している。そして、この何れか1本のロッド21aの基端部を結合したトラニオン10aの動き、即ち、前記傾転軸12の軸方向の変位及びこの傾転軸12を中心とする揺動変位を、前記プリセスカム15及びリンク腕22を介して前記スプール16に伝達してこのスプール16を軸方向に変位させ、前記ステッピングモータ14により前記スリーブ17を軸方向に変位させる様にしている。
【0006】
前記トロイダル型無段変速機1の変速比を調節する際には、前記ステッピングモータ14により前記スリーブ17を所定位置にまで変位させ、前記変速比制御弁13を所定方向に開く。すると、前記各トラニオン10a、10bに付属の前記各アクチュエータ11、11の油圧室19a、19bに対して圧油が所定方向に給排され、これら各アクチュエータ11、11により前記各トラニオン10a、10bが、それぞれ前記各傾転軸12、12の軸方向に変位する。この結果、これら各トラニオン10a、10bに支持された前記各パワーローラ9、9に関する前記各トラクション部が前記中立位置からずれて、前記変速比が変化し始める。この様にこれら各トラクション部がこの中立位置からずれて変速比が変化し始める瞬間には、前記各トラニオン10a、10bの軸方向変位に伴って、前記変速比制御弁13の開閉状態が、前記所定方向とは逆方向に切り換わる。従って、前記各トラニオン10a、10bは、変速の為に揺動変位を開始し始めた瞬間から、軸方向に関して中立位置に向け移動し(戻り)始める。そして、前記変速比が前記所望の値になった状態で、前記各トラクション部が前記中立位置に戻ると同時に、前記変速比制御弁13が閉じられる。この結果、前記トロイダル型無段変速機1の変速比が、前記所望の値に保持される。
【0007】
ところで、上述の様なトロイダル型無段変速機1により前記両入力ディスク7a、7bと前記出力ディスク8との間で動力を伝達する為には、前記各トラクション部の面圧を十分に確保する必要がある。この為に、前記図8に示した構造には、油圧式の押圧装置23を組み込んでいる。前記無段変速装置の運転時には、前記入力軸5により一方(図8の左方)の入力ディスク7aを、前記押圧装置23を介して回転駆動する。この結果、入力回転軸24の両端部に支持された前記両入力ディスク7a、7bが、互いに近づく方向に押圧されつつ同期して回転する。そして、この回転が、前記各パワーローラ9、9を介して前記出力ディスク8に伝わり、この出力ディスク8から取り出される。
【0008】
上述の様な無段変速装置に組み込まれているか、単独で使用されるかに拘らず、トロイダル型無段変速機1の運転時には、動力の伝達に供される各部材、即ち、前記入力、出力各ディスク7a、7b、8と前記各パワーローラ9、9とが、前記押圧装置23が発生する押圧力に基づいて弾性変形する。そして、この弾性変形に伴って、前記入力、出力各ディスク7a、7b、8が軸方向に変位する。又、前記押圧装置23が発生する押圧力は、前記トロイダル型無段変速機1により伝達するトルクが大きくなる程大きくなり、それに伴って前記各部材7a、7b、8、9の弾性変形量も多くなる。従って、前記トルクの変動に拘らず、前記入力、出力各ディスク7a、7b、8の内側面と前記各パワーローラ9、9の周面との接触状態を適正に維持する為に、前記各トラニオン10a、10bに対してこれら各パワーローラ9、9を、前記各ディスク7a、7b、8の軸方向に変位させる機構が必要になる。上述した従来構造の第1例の場合には、前記各パワーローラ9、9を支持した各支持軸25、25の先半部を、同じく基半部を中心として揺動変位させる事により、前記各パワーローラ9、9を前記軸方向に変位させる様にしている。
【0009】
上述の様な従来構造の第1例の場合、前記各パワーローラ9、9を前記軸方向に変位させる為の構造が複雑で、部品製作、部品管理、組立作業が何れも面倒になり、コストが嵩む事が避けられない。この様な問題を解決する為の技術として特許文献3には、図11〜16に示す様な構造が記載されている。本発明は、この図11〜16に示した従来構造の第2例を改良するものであるから、次に、この従来構造の第2例に就いて説明する。この従来構造の第2例の特徴は、トラニオン10cに対してパワーローラ9aを、入力、出力各ディスク7a、7b、8(図8参照)の軸方向の変位を可能に支持する部分の構造にあり、トロイダル型無段変速機全体としての構造及び作用は、前述の図8〜9に示した従来構造の第1例と同様である。
【0010】
前記従来構造の第2例を構成するトラニオン10cは、両端部に互いに同心に設けられた1対の傾転軸12a、12aと、これら両傾転軸12a、12a同士の間に存在し、少なくとも入力、出力各ディスク7a、7b、8(図8参照)の径方向(図12、14〜16の上下方向)に関する内側(図12、14〜16の上側)の側面を円筒状凸面26とした、支持梁部27とを備える。前記両傾転軸12a、12aは、それぞれラジアルニードル軸受46、46を介して、支持板28、28(図8〜9参照)に、揺動を可能に支持する。
【0011】
又、前記円筒状凸面26の中心軸イは、図12、15〜16に示す様に、前記両傾転軸12a、12aの中心軸ロと平行で、これら両傾転軸12a、12aの中心軸ロよりも、前記各ディスク7a、7b、8の径方向に関して外側(図12、15〜16の下側)に存在する。又、前記支持梁部27とパワーローラ9aの外側面との間に設けるスラスト玉軸受29を構成する外輪30の外側面に、部分円筒面状の凹部31を、この外側面を径方向に横切る状態で設けている。そして、この凹部31と、前記支持梁部27の円筒状凸面26とを係合させ、前記トラニオン10cに対して前記外輪30を、前記各ディスク7a、7b、8の軸方向に関する揺動変位を可能に支持している。
【0012】
又、前記外輪30の内側面中央部に支持軸25aを、この外輪30と一体に固設して、前記パワーローラ9aをこの支持軸25aの周囲に、ラジアルニードル軸受32を介して、回転自在に支持している。更に、前記トラニオン10cの内側面のうち、前記支持梁部27の両端部と1対の傾転軸12a、12aとの連続部に、互いに対向する1対の段差面33、33を設けている。そして、これら両段差面33、33と、前記スラスト玉軸受29を構成する外輪30の外周面とを、当接若しくは近接対向させて、前記パワーローラ9aからこの外輪30に加わるトラクション力を、何れかの段差面33、33で支承可能としている。
【0013】
上述の様に構成する従来構造の第2例のトロイダル型無段変速機によれば、前記パワーローラ9aを前記各ディスク7a、7b、8の軸方向に変位させて、構成各部材の弾性変形量の変化に拘らず、前記パワーローラ9aの周面と前記各ディスク7a、7b、8との接触状態を適正に維持できる構造を、簡単で低コストに構成できる。
即ち、トロイダル型無段変速機の運転時に、入力、出力各ディスク7a、7b、8、各パワーローラ9a等の弾性変形に基づき、これら各パワーローラ9aをこれら各ディスク7a、7b、8の軸方向に変位させる必要が生じると、これら各パワーローラ9aを回転自在に支持している前記スラスト玉軸受29の外輪30が、外側面に設けた部分円筒面状の凹部31と支持梁部27の円筒状凸面26との当接面を滑らせつつ、この円筒状凸面26の中心軸イを中心として揺動変位する。この揺動変位に基づき、前記各パワーローラ9aの周面のうちで、前記各ディスク7a、7b、8の軸方向片側面と転がり接触する部分が、これら各ディスク7a、7b、8の軸方向に変位し、前記接触状態を適正に維持する。
【0014】
前述した通り、前記円筒状凸面26の中心軸イは、変速動作の際に各トラニオン10cの揺動中心となる傾転軸12a、12aの中心軸ロよりも、前記各ディスク7a、7b、8の径方向に関して外側に存在する。従って、前記円筒状凸面26の中心軸イを中心とする揺動変位の半径は、前記変速動作の際の揺動半径よりも大きく、前記両入力ディスク7a、7bと前記出力ディスク8との間の変速比の変動に及ぼす影響は少ない(無視できるか、容易に修正できる範囲に留まる)。
【0015】
図11〜16に示した従来構造の第2例の場合、図8〜9に示した同第1例に比べて、部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易いが、変速動作を安定させる面からは、改良の余地がある。この理由は、前記各支持梁部27を中心とする前記各外輪30の揺動変位を円滑に行わせる為、これら各支持梁部27の両端部分に1対ずつ設けた、前記各段差面33、33同士の間隔Dを、前記各外輪30の外径dよりも少し大きく(D>d)する為である。これら各外輪30、及び、これら各外輪30と同心に支持された前記各パワーローラ9aは、前記間隔Dと前記外径dとの差(D−d)分だけ、前記各支持梁部27の軸方向に変位可能になる。
【0016】
一方、トロイダル型無段変速機を搭載した車両の運転時、前記各パワーローラ9aには前記各ディスク7a、7b、8から、加速時と減速時(エンジンブレーキの作動時)とで逆方向の力(トロイダル型無段変速機の技術分野で周知の「2Ft」)が加わる。そして、この力2Ftにより、前記各パワーローラ9aが、前記各外輪30と共に、前記各支持梁部27の軸方向に変位する。この変位の方向は、前述した各アクチュエータ21、21による各トラニオン10a、10b(図9参照)の変位方向と同じであり、変位量が0.1mm程度であっても、変速動作が開始される可能性がある。そして、この様な原因で変速動作が開始された場合には、運転動作とは直接関連しない変速動作となり、何れ修正されるにしても、運転者に違和感を与える。
【0017】
上述の様にして生じる、運転動作とは直接関連しない変速動作の発生を抑える為には、前記間隔Dと前記外径dとの差(D−d)を僅少に(例えば数十μm程度に)抑える事が考えられる。但し、ハーフトロイダル型のトロイダル型無段変速機の運転時には、トラクション部から前記各パワーローラ9a、前記各外輪30を介して前記各支持梁部27に加わるスラスト荷重により、前記各トラニオン10cが、図17に誇張して示す様に、前記各外輪30を設置した側が凹となる方向に弾性変形する。そして、この弾性変形の結果、前記各トラニオン10c毎に1対ずつ設けた段差面33、33同士の間隔が縮まる。この様な状態でも、これら各段差面33、33同士の間隔Dが前記各外輪30の外径d以下にならない様にする為には、通常状態(前記各トラニオン10cが弾性変形していない状態)での、前記間隔Dと前記外径dとの差を或る程度確保する必要がある。この結果、上述の様な、運転動作とは直接関連しない変速動作が発生し易くなる。
【0018】
一方、前記特許文献3には、支持梁部側に設けた円筒状凸面の一部に係止したアンカ駒と、外輪側の凹部の内面に形成したアンカ溝とを係合させる事により、前記力2Ftを支承する構造が記載されている。又、円筒状凸面と凹部との互いに整合する部分に形成された、それぞれが断面円弧形である転動溝同士の間に複数個の玉を掛け渡して、前記力2Ftを支承する構造も記載されている。但し、前者の構造の場合には、前記アンカ駒を前記支持梁部に、前記力2Ftを支承できる程度の強度及び剛性を確保して支持固定する事が難しく、低コスト化と十分な信頼性確保とを図りにくい。又、後者の場合には、前記力2Ftが大きくなり、前記各玉の転動面と前記各転動溝との転がり接触部の面圧が上昇すると、これら各転動溝の内面に圧痕が形成され、各トラニオンに対して各外輪が揺動変位する際に振動が発生する可能性がある。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開2009−30749号公報
【特許文献2】特開2006−283800号公報
【特許文献3】特開2008−25821号公報
【発明の概要】
【発明が解決しようとする課題】
【0020】
本発明は、上述の様な事情に鑑み、部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易く、しかも変速動作を安定させられる構造を実現すべく発明したものである。
【課題を解決するための手段】
【0021】
本発明のトロイダル型無段変速機は、少なくとも1対のディスクと、複数のトラニオンと、これら各トラニオンと同数のパワーローラと、同じく同数のスラスト転がり軸受と、押圧装置とを備える。
このうちの各ディスクは、それぞれが断面円弧形のトロイド曲面である互いの軸方向片側面同士を対向させた状態で、互いに同心に、相対回転を自在に支持している。
又、前記各トラニオンは、それぞれ、1対の傾転軸と、支持梁部と、1対の段差面とを備える。このうちの両傾転軸は、前記各トラニオンの両端部に、互いに同心に設けている。又、前記支持梁部は、これら両傾転軸同士の間に存在し、少なくとも前記各ディスクの径方向に関する内側の側面を、これら両傾転軸の中心軸と平行でこの中心軸よりも前記各ディスクの径方向に関して外側に存在する中心軸を有する、円筒状凸面としている。又、前記両段差面は、前記支持梁部の両端部に、互いに対向する状態で設けている。それぞれがこの様な構成を有する、前記各トラニオンは、軸方向に関して前記各ディスクの軸方向側面同士の間位置の周方向に関して複数箇所に、これら各ディスクの中心軸に対し捩れの位置にある前記両傾転軸を中心とする揺動変位を自在に設けている。
又、前記各パワーローラは、前記各トラニオンの内側面に、それぞれスラスト転がり軸受を介して回転自在に支持しており、球状凸面としたそれぞれの周面を、前記各ディスクの軸方向片側面にそれぞれ当接させている。
又、前記各スラスト転がり軸受は、前記各トラニオンの支持梁部と前記各パワーローラの外側面との間に設けている。そして、これら各支持梁部側に設けられた外輪と、これら各外輪の内側面に設けられた外輪軌道と前記各パワーローラの外側面に設けられた内輪軌道との間に転動自在に、それぞれ複数個ずつ設けられた転動体とを備える。
又、前記各スラスト転がり軸受の外輪は、これら各外輪の外側面に設けられた凹部と前記各支持梁部の円筒状凸面とを係合させると共に、これら各支持梁部の両端部に設けられた前記各トラニオン毎に1対ずつの段差面同士の間に配置している。そして、これら各トラニオンに対し、前記各支持梁部の軸方向の変位を規制した状態で、前記各ディスクの軸方向に関する揺動変位を可能に支持している。
更に、前記押圧装置は、前記各パワーローラを挟んだ状態で互いに対向する前記各ディスク同士を、互いに近づく方向に押圧する。
【0022】
特に、本発明のトロイダル型無段変速機に於いては、前記各スラスト転がり軸受を構成する外輪のうちの、少なくとも1個の外輪自体、若しくは、この外輪に結合固定されてこの外輪と同期して変位する部材の一部に、前記支持梁部を中心とするこの外輪の揺動方向に対し傾斜した被検出面を設けている。又、運転時にも変位する事のない固定部分に支持したセンサにより、前記支持梁部の軸方向に関する、前記被検出面の変位を検出可能としている。
【0023】
この様な本発明のトロイダル型無段変速機を実施する場合、具体的には、請求項2に記載した発明の様に、変速比制御弁の切り換えに基づいて油圧式のアクチュエータへの圧油の給排を行い、前記各トラニオンをそれぞれの両端部に設けた傾転軸の軸方向に変位させる事で、これら各トラニオンをこれら各傾転軸を中心として揺動変位させ、前記各ディスク同士の間の変速比を変更する、変速比制御手段を備える。又、前記変速比制御弁は、スプールとスリーブとの軸方向に関する相対変位に基づいて油圧回路を切り換え、前記各トラニオン毎に設けた油圧式のアクチュエータを構成するピストンを挟んで設けた1対の油圧室に圧油を給排するものとする。そして、前記スプールと前記スリーブとのうちの何れか一方の部材を、変速比設定用の第一電動アクチュエータにより軸方向に変位させ、同じく他方の部材を、前記センサの検出信号に基づいて制御される、フィードバック用の第二電動アクチュエータにより軸方向に変位させる。
【0024】
又、好ましくは、請求項3に記載した発明の様に、前記外輪を揺動変位可能に支持した前記支持梁部を緩く(この支持梁部を中心とするこの外輪の揺動変位を可能として)跨ぐ状態でこの外輪に、アーチ状の被検出ブラケットを支持固定する。そして、この支持梁部の軸方向に関して、この被検出ブラケットの片側面に、前記被検出面を設ける。
【発明の効果】
【0025】
上述の様に構成する本発明のトロイダル型無段変速機によれば、部品製作、部品管理、組立作業が何れも容易になり、コスト低廉化を図り易く、しかも変速動作を安定させられる構造を実現できる。
このうちのコスト低廉化は、前述の図11〜16に示した従来構造の第2例と同様の理由により、図り易い。
【0026】
又、変速動作の安定化は、外輪自体若しくはこの外輪に結合固定された部材の一部に設けた被検出面の変位を検出する事により図れる。この外輪は、トラニオンの支持梁部の軸方向に関し、パワーローラと同期して変位する為、この外輪がこの支持梁部の軸方向に変位しても、この軸方向に関する、前記パワーローラの位置を正しく検出できる。言い換えれば、従来構造の様に、トラニオンを介してパワーローラの位置を測定する場合の様に、これらトラニオンとパワーローラとの間に存在する隙間が、このパワーローラの位置測定に関する誤差に結び付く事はない。
【0027】
この為、例えば請求項2に記載した発明の様に、センサにより検出した前記外輪の姿勢を表す信号に基づいて、変速比制御弁の切り換えを行えば、前記トラニオンと前記パワーローラとの間に存在する隙間に拘らず、トロイダル型無段変速機の変速比を精度良く調節できる。
更に、請求項3に記載した発明の様に、アーチ状の被検出ブラケットを前記外輪に対し、支持梁部を跨ぐ状態で支持固定すれば、比較的簡単で、しかもセンサを設置し易い構造で、前記外輪の変位を求められる構造を実現できる。しかも、トロイダル型無段変速機を組み立てる以前の状態でも、前記トラニオンと前記外輪とが分離する事を防止できる。この為、これらトラニオン及び外輪を含む部分をサブアッセンブリユニットとして取り扱う事ができて、トロイダル型無段変速機の組立性の向上を図れる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施の形態の第1例を示す、トラニオンとスラスト玉軸受とパワーローラとを取り出して、各ディスクの径方向外側から見た斜視図。
【図2】同じく周方向且つ径方向に関して少し内方から見た斜視図。
【図3】同じく径方向外方から見た正投影図。
【図4】同じく周方向から見た正投影図。
【図5】同じくスラスト玉軸受とパワーローラとを取り出して、各ディスクの径方向外側から見た斜視図。
【図6】同じく異なる角度から見た斜視図。
【図7】スラスト玉軸受を構成する外輪と被検出ブラケットとを結合する前の状態を、図6と円周方向に関して異なる方向から見た状態で示す斜視図。
【図8】従来構造の第1例を示す断面図。
【図9】図8のX−X断面図。
【図10】変速比制御の為の油圧制御装置部分の略断面図。
【図11】従来構造の第2例を示す、スラスト玉軸受を介してパワーローラを支持したトラニオンを、各ディスクの径方向外側から見た斜視図。
【図12】同じく、ディスクの周方向から見た状態で示す正投影図。
【図13】図12の上方から見た平面図。
【図14】図12の右方から見た側面図。
【図15】図13のY−Y断面図。
【図16】図12のZ−Z断面図。
【図17】パワーローラから加わるスラスト荷重に基づいてトラニオンが弾性変形した状態を誇張して示す、図15と同方向から見た断面図。
【発明を実施するための形態】
【0029】
図1〜7は、本発明の実施の形態の1例を示している。尚、本例の特徴は、トラニオン10dに対してパワーローラ9aを、スラスト荷重を支承しつつ回転自在に支持する為のスラスト玉軸受29aを介して、前記トラニオン10dの支持梁部27aに対し揺動変位可能に支持した構造で、前記パワーローラ9aの変位を、前記スラスト玉軸受29aを構成する外輪30aの変位として測定する点にある。トロイダル型無段変速機全体としての構成は、前述の図8〜9に示した構造を含めて、従来から広く知られているトロイダル型無段変速機と同様である。又、前記トラニオン10dの支持梁部27aに対して前記スラスト玉軸受29aを構成する外輪30aを揺動変位可能に支持する為の構造は、基本的には、前述の図11〜16に示した従来構造の第2例と同様である。就いては、前述した、或いは特許文献1〜3に記載される等により従来から広く知られている部分の構造及び作用に就いては、図示並びに説明を、省略若しくは簡略にし、以下、本例の特徴部分を中心に説明する。
【0030】
トロイダル型無段変速機は、それぞれがトラニオン10dとパワーローラ9aとをスラスト玉軸受29aを介して組み合わせて成る、複数組のパワーローラユニット34を備える。これら各パワーローラユニット34の仕様は、前記トラニオン10dと前記パワーローラ9aとの相対変位に結び付く仕様に関する限り、各組で同じとする。具体的には、少なくとも次述する(1)〜(3)の仕様を同じとし、前記トロイダル型無段変速機の運転時に、前記トラニオン10dと前記パワーローラ9aとを、総てのパワーローラユニット34同士の間で、同じだけ相対変位させる。この理由は、何れか1個のトラニオン10dの動き(軸方向の変位量と傾転角度との合成値)をフィードバックして、総てのトラニオン10dの動きを制御する為である。この点は、前述した従来構造の場合に、複数のトラニオン10a、10bのうちの何れか1個のトラニオン10aにのみプリセスカム15(図9参照)を設置し、この何れか1個のトラニオン10aの動きを変速比制御弁13(図10参照)にフィードバックして、総てのトラニオン10a、10bの動きを制御するのと同様である。
【0031】
(1) 各トラニオン10dにそれぞれ1対ずつ形成した段差面33a、33a同士の間隔Dと、前記外輪30aのうちでこれら両段差面33a、33a同士の間に配置される部分の、前記支持梁部27aの軸方向に関する寸法dとの差「D−d」
この差「D−d」を同じにする事は、トロイダル型無段変速機の運転時に、総てのパワーローラユニット34で、前記各トラニオン10dに対して前記各パワーローラ9a(を支持したスラスト玉軸受29aの外輪30a)を、前記支持梁部27aの軸方向に関して同じだけ変位させる為に重要である。図示の例では、前記外輪30aの外周面形状を単なる円形としているので、この外輪30aの外径が、前記軸方向に関する寸法dとなる。これに対して、この外輪30aの外周面の径方向反対側2個所位置に、前記両段差面33a、33aとの当接部の面圧を低く抑える為に、これら両段差面33a、33aと対向する、互いに平行な1対の平坦面を形成する場合がある。この様な場合には、これら両平坦面同士の間隔が、前記軸方向に関する寸法dとなる。
【0032】
(2) 前記各トラニオン10dの支持梁部27aの剛性
前述の図17により説明した様に、トロイダル型無段変速機の運転時に前記各トラニオン10dは、前記各支持梁部27aの内側面側が凹となる方向に弾性変形し、前記両段差面33a、33a同士の間隔Dが縮まる。前記各パワーローラユニット34同士の間で、前記各支持梁部27aの弾性変形量、延いては、前記間隔Dの変化量が異なると、前記各パワーローラユニット34同士の間で、前記各トラニオン10dに対する前記各パワーローラ9aの変位量に差が生じる。この様な差が生じない様にする為に、前記各支持梁部27aの剛性、特に、各ディスクの径方向に関する曲げ剛性を同じとする事が重要になる。
【0033】
(3) 前記各スラスト玉軸受29aのラジアル剛性
トロイダル型無段変速機の運転時に前記各パワーローラ9aには、前述した様に、2Ftと呼ばれる力が加わる。この力2Ftは、前記各スラスト玉軸受29aを介して前記各トラニオン10dに設けた何れかの段差面33aにより支承する。この際、前記力2Ftは前記各スラスト玉軸受29aに対し、ラジアル方向に加わる。これら各スラスト玉軸受29aは、スラストアンギュラ型の玉軸受であり、スラスト荷重に加えてラジアル荷重も支承できる。但し、ラジアル荷重に基づいて、前記各パワーローラ9aと前記各外輪30aとがラジアル方向(各ディスクの回転方向)に、僅かとは言え変位する事は避けられない。後述する様に、本例の構造で変速比制御の為にフィードバックするのは、前記各外輪30aのうちの何れか1個の外輪30aの変位量であるのに対して、実際に変速に関係する変位は、前記各パワーローラ9aの変位量である。そこで、前記各スラスト玉軸受29aを構成する玉の数、直径、接触角を、これら各スラスト玉軸受29a同士の間で互いに同じとして、これら各スラスト玉軸受29aのラジアル剛性を互いに同じとする。
【0034】
上述の様に、前記トラニオン10dと前記パワーローラ9aとの相対変位に結び付く仕様を互いに同じとした複数組のパワーローラユニット34のうち、何れか1個のパワーローラユニット34に組み込んだスラスト玉軸受29aを構成する外輪30aに、アーチ状の被検出ブラケット35を支持固定している。この被検出ブラケット35は、被検出部36と、この被検出部36の両端部から互いに同じ方向に折れ曲がった1対の脚部37a、37bとから成る。この被検出部36は、前記被検出ブラケット35を前記外輪30aに支持固定した状態で、前記トラニオン10dの両端部に互いに同心に設けた傾転軸12aの中心軸と同心の部分円弧状であり、片側面を被検出面38としている。この被検出面38は、前記傾転軸12aの中心軸をその中心とする円周方向に関し傾斜した傾斜面であり、前記パワーローラユニット34を組み立てた状態で、円周方向に関する位置変化に伴って、前記支持梁部27aの軸方向位置が変化する。
【0035】
上述の様な被検出ブラケット35は、前記両脚部37a、37bの先端面に突設した円柱状の突起39、39を、前記外輪30aの外側面のうちの凹部31の両側部分に存在する肩部40、40に形成した、円形の凹孔41、41に圧入する事で、前記外輪30aの外側面の所定位置に支持固定している。尚、この外輪30aに前記被検出ブラケット35を支持固定するのに先立って、この外輪30aの凹部31と前記支持梁部27aの円筒状凸面26aとを係合させておく(この外輪30aと前記トラニオン10dとを組み合わせておく)。又、この外輪30aに前記被検出ブラケット35を支持固定した状態で、この被検出ブラケット35と前記支持梁部27aとの間には、前記トロイダル型無段変速機の運転時に各部材の弾性変形に基づく、この支持梁部27aに対する前記外輪30aの揺動変位を許容できるだけの隙間を介在させる。
【0036】
尚、上述の様に、前記外輪30aと前記トラニオン10dとを組み合わせると共に、この外輪30aに前記被検出ブラケット35を支持固定した状態では、トロイダル型無段変速機を組み立てる以前の状態でも、前記トラニオン10dと前記外輪30aとが分離する事を防止できる。又、この外輪30aと、前記スラスト玉軸受29aの他の構成部材及び前記パワーローラ9aとは、この外輪30aと一体の支持軸25bの先端部に係止した止め輪44及びワッシャ45により非分離に組み合わされている。この為、前記トラニオン10d及び前記外輪30aを含む、前記パワーローラユニット34部分を、非分離に組み合わされたサブアッセンブリユニットとして取り扱う事ができて、トロイダル型無段変速機の組立性の向上を図れる。
【0037】
上述の様な被検出ブラケット35を組み込んだ、前記パワーローラユニット34は、この様な被検出ブラケット35を備えていない、他のパワーローラユニットと共に、例えば前述の図8〜9に示す様に、入力ディスク7a、7bと出力ディスク8との間に組み込んで、トロイダル型無段変速機1を構成する。そして、前記被検出ブラケット35とセンサ42との組み合わせにより、前記パワーローラユニット34を構成する前記外輪30aの変位量を求め、この変位量を表す信号に基づいて、前記トロイダル型無段変速機1の変速比を、フィードバック制御により規制する様にしている。このフィードバック制御により、前記トロイダル型無段変速機1の構成各部材の弾性変形に基づいてこのトロイダル型無段変速機1の変速比が目標値からずれる、所謂トルクシフトを補正できる等、高精度の変速比制御を行える。尚、前記センサ42は、前記トロイダル型無段変速機1を収納したケーシング43(図8、9参照)の内面、或いはこのケーシング43内に支持固定されたブラケット等、前記トロイダル型無段変速機1の運転時にも変位する事のない部分に支持している。
【0038】
前記センサ42の検出信号は、例えば前述の図10に示した変速比制御の為の油圧制御装置で、変速比制御弁13のスプール16を軸方向に所定量(前記外輪30aの変位量に見合う分だけ)変位させる為に利用する。即ち、前記図10に示した従来構造の場合には、パワーローラを支持したトラニオンの変位を機械的に前記スプール16に伝達する様にしていた。この様な構造では、前述の図11〜16に示した構造の場合に、変速比制御が不安定になる事は、前述した通りである。これに対して、本例の場合には、前記トラニオン10dの変位ではなく、前記外輪30aの変位を測定している。この外輪30aの変位量と前記パワーローラ9aとの変位量は、全く同じではないが、その差は無視できる程に僅かである。従って、前記外輪30aの変位に基づいて前記変速比制御弁13のスプール16を変位させれば、前記トロイダル型無段変速機1の変速比制御を安定して行える。この変速比制御が、段差面33a、33a同士の間隔Dと、前記外輪30aのうちでこれら両段差面33a、33a同士の間に配置される部分の寸法dとの差「D−d」の大小に影響される事はない。但し、総てのパワーローラユニット34同士の間で、この差「D−d」が等しい必要がある。
【0039】
尚、前記センサ42の出力信号に基づいて前記スプール16を変位させる為には、前記図10に示した構造で、変速比設定用のステッピングモータ14と別に、フィードバック制御用のステッピングモータを設ける。そして、この変速比設定用のステッピングモータ14が、送りねじ機構等の直動機構により前記変速比制御弁13のスリーブ17を軸方向に変位させるのと同様に、前記フィードバック制御用のステッピングモータにより、前記スプール16を軸方向に変位させる。
【産業上の利用可能性】
【0040】
センサの出力信号に基づいてトロイダル型無段変速機の変速比を制御する構造は、図示の様な構造に限定されない。又、図示の構造の様に、変速比設定用のステッピングモータ14とフィードバック制御用のステッピングモータとにより、変速比制御弁13のスプール16とスリーブ17とをそれぞれの軸方向に変位させる構造に於いて、各ステッピングモータにより変位させる部材16、17を逆にする事もできる。
【0041】
又、外輪30aの変位を測定する為の被検出ブラケット35の設置位置に関しても、図示の様にこの外輪30aの中央位置に限らず、上端位置や下端位置としても良いし、センサの設置が可能であれば、外輪の一部に、直接被検出面を設ける事もできる。
更に、センサの構造は、変位量を精度良く測定できるものであれば、非接触式、接触式の何れも採用可能である。前記外輪30aの揺動変位に拘らず、十分な耐久性を確保する為には、非接触式のセンサが好ましい。一方、トロイダル型無段変速機の運転時には、センサの設置部分に、トラクションオイルの飛沫が多量に浮遊する状態となるので、光電式、静電容量式等の非接触式のセンサでは、測定値の信頼性を確保できない可能性がある。この様な場合には、接触式のセンサを利用する事が好ましい。
【符号の説明】
【0042】
1 トロイダル型無段変速機
2 遊星歯車式変速機
3 低速用クラッチ
4 高速用クラッチ
5 入力軸
6 出力軸
7a、7b 入力ディスク
8 出力ディスク
9、9a パワーローラ
10、10a、10b、10c、10d トラニオン
11 アクチュエータ
12、12a 傾転軸
13 変速比制御弁
14 ステッピングモータ
15 プリンセスカム
16 スプール
17 スリーブ
18 油圧源
19a、19b 油圧室
20 ピストン
21a、21b ロッド
22 リンク腕
23 押圧装置
24 入力回転軸
25、25a、25b 支持軸
26、26a 円筒状凸面
27、27a 支持梁部
28 支持板
29、29a スラスト玉軸受
30、30a 外輪
31 凹部
32 ラジアルニードル軸受
33、33a 段差面
34 パワーローラユニット
35 被検出ブラケット
36 被検出部
37a、37b 脚部
38 被検出面
39 突起
40 肩部
41 凹孔
42 センサ
43 ケーシング
44 止め輪
45 ワッシャ
46 ラジアルニードル軸受
【特許請求の範囲】
【請求項1】
少なくとも1対のディスクと、複数のトラニオンと、これら各トラニオンと同数のパワーローラと、同じく同数のスラスト転がり軸受と、押圧装置とを備え、
このうちの各ディスクは、それぞれが断面円弧形のトロイド曲面である互いの軸方向片側面同士を対向させた状態で、互いに同心に、相対回転を自在に支持されたものであり、
前記各トラニオンは、それぞれの両端部に互いに同心に設けられた1対の傾転軸と、これら両傾転軸同士の間に存在し、少なくとも前記各ディスクの径方向に関する内側の側面を、これら両傾転軸の中心軸と平行でこの中心軸よりも前記各ディスクの径方向に関して外側に存在する中心軸を有する、円筒状凸面とした支持梁部と、この支持梁部の両端部に互いに対向する状態で設けられた、前記各トラニオン毎に1対ずつの段差面とを備えたもので、軸方向に関して前記各ディスクの軸方向側面同士の間位置の周方向に関して複数箇所に、これら各ディスクの中心軸に対し捩れの位置にある前記両傾転軸を中心とする揺動変位を自在に設けられており、
前記各パワーローラは、前記各トラニオンの内側面に、それぞれスラスト転がり軸受を介して回転自在に支持され、球状凸面としたそれぞれの周面を、前記各ディスクの軸方向片側面にそれぞれ当接させており、
前記各スラスト転がり軸受は、前記各トラニオンの支持梁部と前記各パワーローラの外側面との間に設けられたもので、これら各支持梁部側に設けられた外輪と、これら各外輪の内側面に設けられた外輪軌道と前記各パワーローラの外側面に設けられた内輪軌道との間に転動自在に、それぞれ複数個ずつ設けられた転動体とを備えたものであり、
前記各スラスト転がり軸受の外輪は、これら各外輪の外側面に設けられた凹部と前記各支持梁部の円筒状凸面とを係合させると共に、これら各支持梁部の両端部に設けられた前記各トラニオン毎に1対ずつの段差面同士の間に配置する事により、これら各トラニオンに対し、前記各支持梁部の軸方向の変位を規制した状態で、前記各ディスクの軸方向に関する揺動変位を可能に支持されており、
前記押圧装置は、前記各パワーローラを挟んだ状態で互いに対向する前記各ディスク同士を、互いに近づく方向に押圧するものであるトロイダル型無段変速機に於いて、
前記各スラスト転がり軸受を構成する外輪のうちの少なくとも1個の外輪自体若しくはこの外輪に結合固定されてこの外輪と同期して変位する部材の一部に、前記支持梁部を中心とするこの外輪の揺動方向に対し傾斜した被検出面を設けると共に、運転時にも変位する事のない固定部分に支持したセンサにより、前記支持梁部の軸方向に関する、前記被検出面の変位を検出可能とした事を特徴とするトロイダル型無段変速機。
【請求項2】
変速比制御弁を構成するスプールとスリーブとの軸方向に関する相対変位に基づいて油圧回路を切り換え、前記各トラニオン毎に設けた油圧式のアクチュエータを構成するピストンを挟んで設けた1対の油圧室に圧油を給排し、これら各アクチュエータにより前記各トラニオンをそれぞれの両端部に設けた傾転軸の軸方向に変位させる事で、これら各トラニオンをこれら各傾転軸を中心として揺動変位させ、前記各ディスク同士の間の変速比を変更する、変速比制御手段を備えており、前記スプールと前記スリーブとのうちの何れか一方の部材を、変速比設定用の第一電動アクチュエータにより軸方向に変位させ、同じく他方の部材を、前記センサの検出信号に基づいて制御される、フィードバック用の第二電動アクチュエータにより軸方向に変位させる、請求項1に記載したトロイダル型無段変速機。
【請求項3】
前記外輪を揺動変位可能に支持した前記支持梁部を緩く跨ぐ状態でこの外輪に対し、アーチ状の被検出ブラケットが支持固定されており、この支持梁部の軸方向に関して、この被検出ブラケットの片側面に、前記被検出面が設けられている、請求項1〜2のうちの何れか1項に記載したトロイダル型無段変速機。
【請求項1】
少なくとも1対のディスクと、複数のトラニオンと、これら各トラニオンと同数のパワーローラと、同じく同数のスラスト転がり軸受と、押圧装置とを備え、
このうちの各ディスクは、それぞれが断面円弧形のトロイド曲面である互いの軸方向片側面同士を対向させた状態で、互いに同心に、相対回転を自在に支持されたものであり、
前記各トラニオンは、それぞれの両端部に互いに同心に設けられた1対の傾転軸と、これら両傾転軸同士の間に存在し、少なくとも前記各ディスクの径方向に関する内側の側面を、これら両傾転軸の中心軸と平行でこの中心軸よりも前記各ディスクの径方向に関して外側に存在する中心軸を有する、円筒状凸面とした支持梁部と、この支持梁部の両端部に互いに対向する状態で設けられた、前記各トラニオン毎に1対ずつの段差面とを備えたもので、軸方向に関して前記各ディスクの軸方向側面同士の間位置の周方向に関して複数箇所に、これら各ディスクの中心軸に対し捩れの位置にある前記両傾転軸を中心とする揺動変位を自在に設けられており、
前記各パワーローラは、前記各トラニオンの内側面に、それぞれスラスト転がり軸受を介して回転自在に支持され、球状凸面としたそれぞれの周面を、前記各ディスクの軸方向片側面にそれぞれ当接させており、
前記各スラスト転がり軸受は、前記各トラニオンの支持梁部と前記各パワーローラの外側面との間に設けられたもので、これら各支持梁部側に設けられた外輪と、これら各外輪の内側面に設けられた外輪軌道と前記各パワーローラの外側面に設けられた内輪軌道との間に転動自在に、それぞれ複数個ずつ設けられた転動体とを備えたものであり、
前記各スラスト転がり軸受の外輪は、これら各外輪の外側面に設けられた凹部と前記各支持梁部の円筒状凸面とを係合させると共に、これら各支持梁部の両端部に設けられた前記各トラニオン毎に1対ずつの段差面同士の間に配置する事により、これら各トラニオンに対し、前記各支持梁部の軸方向の変位を規制した状態で、前記各ディスクの軸方向に関する揺動変位を可能に支持されており、
前記押圧装置は、前記各パワーローラを挟んだ状態で互いに対向する前記各ディスク同士を、互いに近づく方向に押圧するものであるトロイダル型無段変速機に於いて、
前記各スラスト転がり軸受を構成する外輪のうちの少なくとも1個の外輪自体若しくはこの外輪に結合固定されてこの外輪と同期して変位する部材の一部に、前記支持梁部を中心とするこの外輪の揺動方向に対し傾斜した被検出面を設けると共に、運転時にも変位する事のない固定部分に支持したセンサにより、前記支持梁部の軸方向に関する、前記被検出面の変位を検出可能とした事を特徴とするトロイダル型無段変速機。
【請求項2】
変速比制御弁を構成するスプールとスリーブとの軸方向に関する相対変位に基づいて油圧回路を切り換え、前記各トラニオン毎に設けた油圧式のアクチュエータを構成するピストンを挟んで設けた1対の油圧室に圧油を給排し、これら各アクチュエータにより前記各トラニオンをそれぞれの両端部に設けた傾転軸の軸方向に変位させる事で、これら各トラニオンをこれら各傾転軸を中心として揺動変位させ、前記各ディスク同士の間の変速比を変更する、変速比制御手段を備えており、前記スプールと前記スリーブとのうちの何れか一方の部材を、変速比設定用の第一電動アクチュエータにより軸方向に変位させ、同じく他方の部材を、前記センサの検出信号に基づいて制御される、フィードバック用の第二電動アクチュエータにより軸方向に変位させる、請求項1に記載したトロイダル型無段変速機。
【請求項3】
前記外輪を揺動変位可能に支持した前記支持梁部を緩く跨ぐ状態でこの外輪に対し、アーチ状の被検出ブラケットが支持固定されており、この支持梁部の軸方向に関して、この被検出ブラケットの片側面に、前記被検出面が設けられている、請求項1〜2のうちの何れか1項に記載したトロイダル型無段変速機。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−108571(P2013−108571A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254518(P2011−254518)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]