
レーダ装置、レーダ受信装置及び目標検出方法

【課題】 目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供すること。
【解決手段】 レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、送信パルスを送信する。無線部は、送信パルスが反射等された反射パルスを受信する。4次元データ生成部は、反射パルスに対してレンジ毎にDFTを行い、周波数ビン毎の周波数バンク信号を生成し、1スキャンにより取得される周波数バンク信号を、レンジと、方位角及び仰角と、相対速度とにより特定される4次元データへ変換する。予測部は、4次元データに基づいて予測4次元データを作成する。積分処理部は、4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、積分結果に基づいて目標を検出する。
【解決手段】 レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、送信パルスを送信する。無線部は、送信パルスが反射等された反射パルスを受信する。4次元データ生成部は、反射パルスに対してレンジ毎にDFTを行い、周波数ビン毎の周波数バンク信号を生成し、1スキャンにより取得される周波数バンク信号を、レンジと、方位角及び仰角と、相対速度とにより特定される4次元データへ変換する。予測部は、4次元データに基づいて予測4次元データを作成する。積分処理部は、4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、積分結果に基づいて目標を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、送信パルスを送信し、送信パルスが反射・散乱・回折された反射パルスを受信することで目標を捜索するレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法に関する。
【背景技術】
【0002】
従来のレーダ装置において、レーダ送信装置は、ある方位にビームを指向し、一定のPRI(Pulse Repetition Interval)で複数の送信パルスを送信する。そして、レーダ受信装置は、物体で反射・散乱・回折した複数の反射パルスに対してコヒーレント積分を行う。ここで、コヒーレント積分とは、複数の反射パルスに対して同一レンジでコヒーレントに積分する処理であり、一般的にはDFT(Discrete Fourier Transform)によって処理される。また、DFTによりコヒーレント積分する処理を総称してドップラフィルタ処理と記すこともある。このように、レーダ送信装置が1ビームポジションに複数の送信パルスを送信し、レーダ受信装置がレーダ送信装置からの送信パルスに基づく反射パルスに対してコヒーレント積分を行う期間を一般的にCPI(Coherent Processing Interval)と呼ぶ。レーダ受信装置は、1CPI単位でコヒーレント積分された受信信号に対して、その強度を測定し、あるスレッショルド値以上の信号が存在した場合、これを目標信号として検知する。
【0003】
ただし、RCS(Radar Cross Section)の小さい目標の検出は、レーダ受信装置で得られる反射パルスの電力が小さくなる。そのため、低RCSの目標に対しては、1CPI単位での探知処理による目標検出は非常に困難とされてきた。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】E. Fisher, A. H. Heimovich, "Spatial diversity in radar - models and detection Performance", IEEE Trans. On Signal Processing, vol. 54, no. 3, pp. 823-838
【非特許文献2】E. Fisher, A. H. Heimovich, "Performance of MIMO Radar System: Advantages of Angular Diversity", IEEE Trans. On Signal Processing, 2004
【発明の概要】
【発明が解決しようとする課題】
【0005】
以上のように、従来のレーダ装置では、目標が低RCSである場合、目標検出が困難であった。
【0006】
そこで、目的は、目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供することにある。
【課題を解決するための手段】
【0007】
実施形態によれば、レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、全方位に各ビームポジション当り予め設定された期間で複数の送信パルスを送信する。無線部は、前記送信パルスが反射、散乱又は回折された反射パルスを受信する。4次元データ生成部は、前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく目標とレーダとの相対速度とにより特定される4次元データへ変換する。予測部は、前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成する。積分処理部は、前記4次元データ生成部からの前記4次元データと、前記予測部で前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、前記積分結果に基づいて目標を検出する。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態に係るレーダ装置を搭載する移動体が目標を探索する際の図である。
【図2】図1のレーダ装置の機能構成を示すブロック図である。
【図3】図1のアンテナユニットから送信される送信パルスを示す図である。
【図4】図1のパルス圧縮部によるパルス圧縮処理を示す図である。
【図5】図1のドップラフィルタ処理部によるコヒーレント積分を示す図である。
【図6】図1の信号処理部で変換される4次元データのレンジr、方位θ、仰角φ及び相対速度vmの関係を示す図である。
【図7】図1の予測部が目標の存在位置を予測する際の処理を示す図である。
【図8】図1のレーダ装置のシミュレーションにおける諸元を示す図である。
【図9】図1のレーダ装置のシミュレーションにおける目標の諸元を示す図である。
【図10】図1のレーダ装置のシミュレーションにおけるレーダ装置と目標との位置関係を示す図である。
【図11】図10のシミュレーションにおいて、スキャン回数に対する所要SNRと、受信SNRとの推移結果を示す図である。
【図12】従来方式のPPI表示の処理結果と、本実施形態に係る方法によるPPI表示の処理結果を示す図である。
【図13】第2の実施形態に係るレーダ装置の機能構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、実施の形態について、図面を参照して説明する。
【0010】
(第1の実施形態)
図1は、第1の実施形態に係るレーダ装置を搭載する移動体が目標を探索する際の模式図を示す。図1に示す移動体に搭載されたレーダ装置は、ビーム方向を周期的に変化させながら全方位をサーチし、目標を検出する。
【0011】
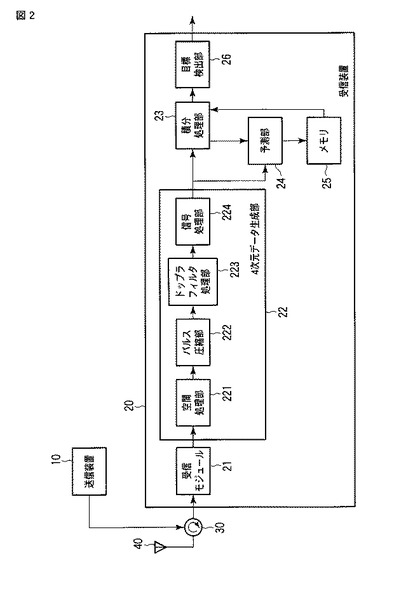
図2は、第1の実施形態に係るレーダ装置の機能構成を示すブロック図である。図2に示すレーダ装置は、送信装置10、受信装置20、送受信切替器30及びアンテナユニット40を具備する。
【0012】
送信装置10は、信号発生器、デジタル−アナログ変換器、周波数変換器、フィルタ及び増幅器等を備える。送信装置10は、送信パルスを生成し、送受信切替器30を介し、アンテナユニット40から空間へ送信する。
【0013】
図3は、本実施形態のアンテナユニット40から送信される送信パルスの模式図を示す。送信装置10は、1ビームポジション当り、一定のPRI(Pulse Repetation Interval)で複数の送信パルスを送信する。このとき、複数の送信パルスを送信する時間間隔は、目標のレンジセルの移動と、目標の水平面方位角及び仰角の変化とを無視できる時間内に設計される。この時間間隔をCPI(Coherent Processing Interval)と呼ぶ。送信装置10は、CPI毎に異なる方角に送信ビームを向け、アンテナユニット40から送信パルスを送信する。
【0014】
アンテナユニット40から送信された送信パルスは、目標等で反射・散乱・回折され、反射パルスとしてレーダ装置へ到来する。
【0015】
受信装置20は、アンテナユニット40及び送受信切替器30を介して反射パルスを受信する。受信装置20は、図2に示すように、受信モジュール21、4次元データ生成部22、積分処理部23、予測部24、メモリ25及び目標検出部26を備える。
【0016】
受信モジュール21は、周波数変換器及びアナログ−デジタル変換器等を備える。受信モジュール21は、反射パルスを受信し、この反射パルスをベースバンド帯のデジタル形式の受信パルスに変換する。受信モジュール21は、受信パルスを4次元データ生成部22へ出力する。
【0017】
4次元データ生成部22は、空間処理部221、パルス圧縮部222、ドップラフィルタ処理部223及び信号処理部224を備える。
【0018】
空間処理部221は、受信モジュール21からの受信パルスに対して所定のビームウェイトを重畳することで、受信ビームを形成する。空間処理部221は、受信ビームが、CPI毎に変化する送信ビームと同一の方向を向くように、受信パルスに対してビームウェイトを重畳する。
【0019】
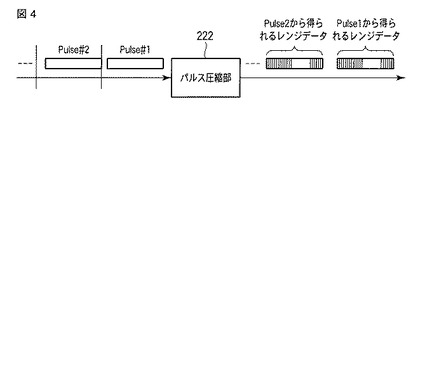
パルス圧縮部222は、空間処理部221からの受信パルスに対してパルス圧縮処理を行い、各受信パルスをレンジセル信号へ変換する。図4は、パルス圧縮部222によるパルス圧縮処理を模式的に示す図である。
【0020】
ドップラフィルタ処理部223は、パルス圧縮部222からのレンジセル信号に対してコヒーレント積分を行う。すなわち、ドップラフィルタ処理部223は、受信パルスにおける同一レンジ成分、すなわちレンジセル信号に対してDFT(Discrete Fourier Transform)を行うことにより、レンジセル毎に周波数バンク信号を生成する。図5は、ドップラフィルタ処理部223によるコヒーレント積分を模式的に示す図である。
【0021】
信号処理部224は、ドップラフィルタ処理部223からの周波数バンク信号の信号強度が、レンジr、方位θ、仰角φ及び相対速度vmにより特定されるようにする。つまり、信号処理部224は、所定の捜索領域における全方向への1回のスキャンで得られる全ての周波数バンク信号の信号強度がレンジr、方位θ、仰角φ及び相対速度vmにより特定されるように変換した4次元データを作成する。あるスキャンiで取得された4次元データは、R(i)(r,θ,φ,vm)と表される。図6は、目標に対するレンジr、方位θ、仰角φ及び相対速度vmの関係を示す模式図である。
【0022】
各周波数ビンの周波数帯域幅Δfは、Δf=fPRF/Mで求められる。ここで、周波数ビンの値は目標の移動によるドップラ周波数に起因してのみ生じると仮定する。なお、Mは1CPIで送信されるパルス数であり、fPRF=1/fPRIである。このとき、m番目(mは1〜Mの自然数)の周波数ビンにおける目標の相対的な移動速度vmは、vm=m・Δf・c/fcで表される。ただし、cは光速、fcはキャリア周波数を示す。
【0023】
信号処理部224は、4次元データを積分処理部23及び予測部24へ出力する。
【0024】
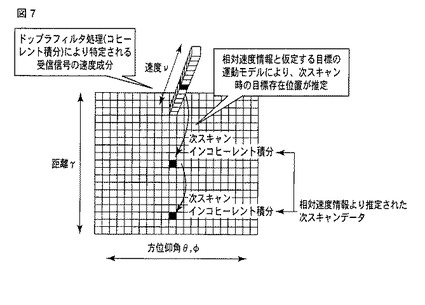
予測部24は、信号処理部224から4次元データを受け取り、4次元データの全要素に目標が存在すると仮定する。そして、予測部24は、信号処理部224からの4次元データに基づいて、次のスキャン時の目標の存在位置を予測する。予測部24での処理を以下に説明する。
【0025】
本実施形態に係るレーダ装置は、図1に示すように、所定の捜索領域における全方位に送受信ビームを順次照射し、目標の捜索を行う。このため、同一方向にビームが照射されるのは離散的(1スキャン間隔)になる。1スキャン当りの周期をTSCAN秒とすると、図5に示すレンジセル毎の周波数バンク信号は周期TSCAN毎に得られることになる。
【0026】
目標の運動モデルを等速直線運動と仮定した場合、周波数ビンmに存在する目標は、TSCAN秒後の次スキャン時には目標はvm・TSCANだけ移動していると予測できる。つまり、隣接するレンジセルの間隔をxとおくと、目標は、
【数1】

【0027】
だけ異なるレンジセルに移動することになる。このため、i番目のスキャン時のレンジセルr、周波数ビンmに目標が存在する場合、TSCAN後のi+1番目のスキャン時のレンジセルr+Δn、周波数ビンmに同じ目標が存在すると予測される。図7は、予測部24が目標の存在位置を予測する際の処理を示す模式図である。
【0028】
予測部24は、予測した存在位置に、現在のスキャンにより取得された4次元データの信号強度を割り当てた予測4次元データを作成し、予測4次元データをメモリ25に記憶させる。
【0029】
また、予測部24は、積分処理部23から後述する積分4次元データを受けた場合、この積分4次元データに基づいて、次のスキャン時(TSCAN後)の目標の存在位置を予測する。そして、予測部24は、予測した存在位置に積分4次元データの信号強度を割り当てた予測4次元データを作成し、予測4次元データをメモリ25に記憶させる。
【0030】
積分処理部23は、信号処理部224から4次元データを受け取ると、前のスキャンに基づいて作成された予測4次元データの信号強度をメモリ25から読み出す。そして、積分処理部23は、信号処理部224からの4次元データの信号強度と、メモリ25からの予測4次元データの信号強度とを合成するインコヒーレント積分を行ない、積分4次元データを作成する。なお、レンジセルr1、相対速度vm1での積分4次元データRintは、信号処理部224からの4次元データRと、メモリ25からの予測4次元データRpreとから以下のように求められる。
【数2】
【0031】
ただし、r1=r2+Δnであるとする。積分処理部23は、積分4次元データを目標検出部26及び予測部24へ出力する。
【0032】
目標検出部26は、積分処理部23からの積分4次元データの信号強度が閾値を超えるか否かを判断する。なお、閾値の値は、インコヒーレント積分の回数に基づいて変動する。目標検出部26は、積分4次元データの信号強度が閾値を超える場合、目標を検出したとする。
【0033】
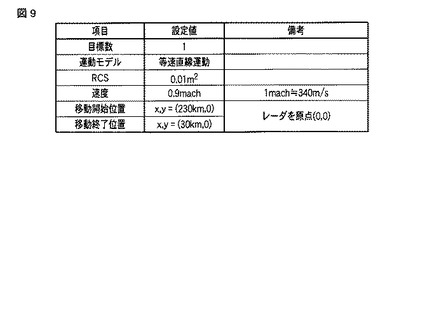
次に、以上のように構成されたレーダ装置の性能評価のシミュレーション結果を示す。図8は本シミュレーションにおけるレーダ装置の諸元を示す図であり、図9は本シミュレーションにおける目標の諸元を示す図である。また、図10は、本シミュレーションにおけるレーダ装置と目標との位置関係を示す図である。なお、本シミュレーションで評価するレーダ装置は、従来方式である1CPIでの探知処理を行った場合、130kmに位置する目標を探知確率PD=0.5、誤警報確率PFA=10−6で検出可能である。
【0034】
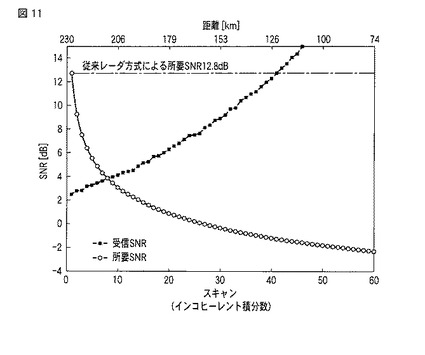
図11は、探知確率PD=0.5、誤警報確率PFA=10−6とした場合のスキャン回数(積分処理部23におけるインコヒーレント積分回数)に対する目標探知に必要となる所要SNR(理論値)と、実際のレーダ装置における受信SNRとの推移結果である。
【0035】
グラフに示すとおり、目標の探知に必要となる所要SNRは、スキャン数に相当するインコヒーレント積分数が増加することで低減されていく。また、実際のレーダ装置における受信SNRは、目標がレーダに対して近付いていくため、スキャン数の増加に伴い増加する。なお、所要SNRと受信SNRとが交差する点が目標探知が可能となるスキャン数となる。
【0036】
従来方式である1CPIによる目標探知の所要SNRは約12.8dBであり、これはスキャン数が増加しても変わらない。結果より、従来方式で目標が探知できるスキャン数は所要SNRと受信SNRとが交差する点であり、約42〜43スキャン目となる。なお、レーダ−目標間の距離で換算すると42スキャン目は約125kmとなる。一方、本実施形態に係るレーダ装置ではスキャン数に伴い所要SNRは減少し、受信SNRと交差する点は8〜9スキャン目となる。これをレーダ−目標間の距離で換算すると約210kmとなる。
【0037】
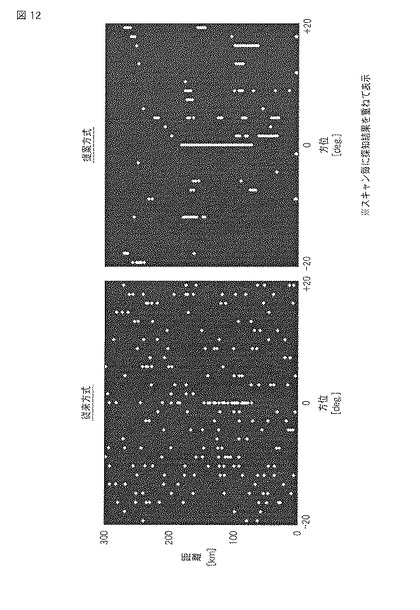
図12は、従来方式と本提案方式のPPI表示(Bスコープ)の処理結果である。結果より、従来方式は約130km付近で目標探知がなされているのに対して、本実施形態に係るレーダ装置では約200km付近から目標探知が実現されていることが確認できる。図12の結果により、本実施形態に係るレーダ装置は、従来のレーダ装置と比較してより遠い距離で目標を探知することが可能であることが確認できる。
【0038】
以上のように、上記第1の実施形態では、周波数バンク信号を(r,θ,φ,vm)により指定される4次元データへ変換する。予測部24は、4次元データの全要素に目標の存在を仮定し、次のスキャンでの目標の存在位置を予測する。そして、積分処理部23は、現在のスキャンにより取得された4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分し積分4次元データを作成するようにしている。これにより、実際に目標が位置する存在位置の信号強度が従来よりも早く積み上がることとなり、目標の検出確率を高めることが可能となる。
【0039】
なお、上記第1の実施形態に係るレーダ装置では、目標が存在し得る位置及び取り得る速度を仮定し、前記仮定した位置及び速度に基づいて極座標信号を4次元データに変換するものとする。
【0040】
したがって、上記第1の実施形態に係るレーダ装置によれば、目標が低RCSである場合であっても、目標を検出することができる。
【0041】
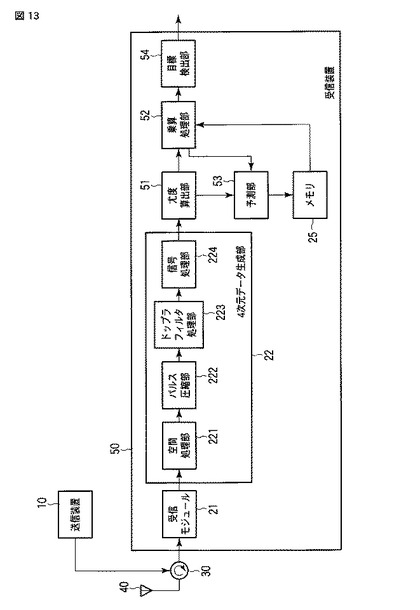
(第2の実施形態)
図13は、第2の実施形態に係るレーダ装置の機能構成を示すブロック図である。図13に示すレーダ装置は、送信装置10、受信装置50、送受信切替器30及びアンテナユニット40を具備する。
【0042】
受信装置50は、受信モジュール21、4次元データ生成部22、尤度算出部51、乗算処理部52、予測部53、メモリ25及び目標検出部54を備える。
【0043】
尤度算出部51は、4次元データ生成部22からの4次元データの信号強度と、予め記憶している受信機雑音の確率密度分布とを比較し、4次元データが受信機の雑音信号である確率を尤度情報として算出する。尤度算出部51は、4次元データの信号強度を尤度情報に変換した4次元尤度データを作成する。尤度算出部51が尤度情報を算出する処理を以下に説明する。
【0044】
受信機雑音をガウス雑音と仮定し、その雑音信号が狭帯域増幅器を通過するものとすれば、その電圧出力の包絡線の確率密度関数は次式のレイリー分布で表される。
【数3】
【0045】
ここで、Aは狭帯域増幅器の出力包絡線の振幅、σNは雑音電圧である。Aiを4次元データR(i)(r,θ,φ,vm)の振幅値とすると、反射パルスが雑音信号である確率(尤度)は次式でもとめられる。
【数4】
【0046】
式4により算出される尤度は、4次元データの各成分に格納される信号が雑音信号であるという確率(尤もらしさ)を表している。つまり、4次元データの信号強度Aiが低い値をとれば、レイリー分布の確率密度分布にしたがい、4次元データは雑音信号である確率が高くなる。一方、4次元データの信号強度Aiが高い値をとれば、雑音信号であるという確率が低くなるので、観測値は目標信号であるという確率が高くなる。尤度算出部51は、作成した4次元尤度データを乗算処理部52及び予測部53へ出力する。
【0047】
予測部53は、尤度算出部51からの4次元尤度データに基づいて、次のスキャン時の目標の存在位置を予測する。つまり、予測部53は、i番目のスキャン時のレンジセルr、周波数ビンmに目標が存在する場合、TSCAN後のi+1番目のスキャン時のレンジセルr+Δn、周波数ビンmに同じ目標が存在すると予測する。予測部53は、予測した存在位置に、現在のスキャンにより取得された4次元尤度データを割り当てた予測4次元尤度データを作成し、予測4次元尤度データをメモリ25に記憶させる。
【0048】
また、予測部53は、乗算処理部52から後述する結合4次元尤度データを受けた場合、この結合4次元尤度データに基づいて、次のスキャン時(TSCAN後)の目標の存在位置を予測する。そして、予測部53は、予測した存在位置に結合4次元尤度データの尤度情報を割り当てた予測4次元尤度データを作成し、予測4次元尤度データをメモリ25に記憶させる。
【0049】
乗算処理部52は、尤度算出部51から4次元尤度データを受け取ると、前のスキャンに基づいて作成された予測4次元尤度データの尤度情報をメモリ25から読み出す。そして、乗算処理部52は、尤度算出部51からの4次元尤度データの尤度情報と、メモリ25からの予測4次元尤度データの尤度情報とを掛け合わせる。なお、結合4次元尤度データPrcombは、尤度算出部51からの4次元尤度データPrと、メモリ25からの予測4次元尤度データPrpreとから以下のように求められる。
【数5】
【0050】
目標検出部54は、乗算処理部52からの結合4次元尤度データの尤度情報が予め設定された誤警報確率を下回るか否かを判断する。目標検出部54は、結合4次元尤度データの尤度情報が誤警報確率を下回る場合、目標を検出したとする。
【0051】
以上のように、上記第2の実施形態では、4次元データの信号強度に基づいて尤度情報を算出し、尤度情報を用いて目標を検出するようにしている。第1の実施形態に係るレーダ装置では、スキャン毎に電力(又は振幅値)を加算するため、その合成値は線形に増加していく。そのため、ダイナミックレンジを広くとる必要がある。第2の実施形態では、尤度情報を用い、目標を確率統計的に検出することにより、ダイナミックレンジの増大を防ぐことが可能となる。
【0052】
したがって、上記第2の実施形態に係るレーダ装置によれば、目標が低RCSである場合であっても、目標を検出することができる。
【0053】
なお、上記第2の実施形態では、受信機内の雑音振幅の確率密度分布をガウシアンと仮定したが、レーダ装置は様々な雑音振幅の確率密度分布を仮定し、尤度の算出に用いるものとする。
【0054】
(その他の実施形態)
なお、上記各実施形態では、目標の高度に関らず、次スキャンでの目標の存在位置を予測する方法について説明した。しかしながら、目標の種類によっては、高度毎に移動速度が制限されるものもある。よって、信号処理部224は、高度毎に速度の絶対値を制限し、制限した速度の範囲内で相対速度vmの値を決定するようにしても良い。これにより、演算量を削減することが可能となる。
【0055】
また、上記各実施形態では、全レーダ領域からの周波数バンクデータを4次元データへ変換するようにしている。しかしながら、必ずしも全レーダ領域からの周波数バンクデータを4次元データへ変換する必要はない。例えば、従来のレーダ動作で目標を探知できるような近距離に対しては変換領域から除外してもよい。このとき、近距離内で取得された周波数バンク信号は目標検出部26へ出力され、信号強度に基づいて目標が検出される。また、近距離内で取得された周波数バンク信号は尤度算出部51へ出力され、信号強度に基づいて尤度が算出される。そして、目標検出部54で、尤度情報に基づいて目標が検出される。
【0056】
また、相対速度vm=m・Δf・c/fcは、レーダの周波数fPRFにより折り返しが生じる可能性がある。その折り返し回数Dは次式で求められる。
【数6】
【0057】
ここで、vは、捜索対象とする目標の実際の速度である。よって、折り返しによる誤った相対速度推定を回避するため、速度ベクトルvは折り返しを補償するよう次元の拡張を図ったものとしてもよい。なお、折り返し次元速度は以下のように構成される。
【数7】
【0058】
ただし、dは折り返し回数を表し、d=d1〜Dである。
【0059】
また、上記各実施形態では、目標の運動モデルを等速直線運動と仮定した場合を例に説明したが、目標の運動モデルは、等速直線運動に限定される訳ではない。
【0060】
また、上記各実施形態では、レーダ装置は送信装置と受信装置とを具備する場合を例に説明した。しかしながら、レーダ装置は必ずしも送信装置と受信装置との両方を具備する必要はない。送信装置と受信装置とが分離して構成されていても構わない。
【0061】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0062】
10…送信装置
20,50…受信装置
21…受信モジュール
22…4次元データ生成部
221…空間処理部
222…パルス圧縮部
223…ドップラフィルタ処理部
224…信号処理部
23…積分処理部
24,53…予測部
25…メモリ
26,54…目標検出部
30…送受信切替器
40…アンテナユニット
51…尤度算出部
52…乗算処理部
【技術分野】
【0001】
本発明の実施形態は、送信パルスを送信し、送信パルスが反射・散乱・回折された反射パルスを受信することで目標を捜索するレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法に関する。
【背景技術】
【0002】
従来のレーダ装置において、レーダ送信装置は、ある方位にビームを指向し、一定のPRI(Pulse Repetition Interval)で複数の送信パルスを送信する。そして、レーダ受信装置は、物体で反射・散乱・回折した複数の反射パルスに対してコヒーレント積分を行う。ここで、コヒーレント積分とは、複数の反射パルスに対して同一レンジでコヒーレントに積分する処理であり、一般的にはDFT(Discrete Fourier Transform)によって処理される。また、DFTによりコヒーレント積分する処理を総称してドップラフィルタ処理と記すこともある。このように、レーダ送信装置が1ビームポジションに複数の送信パルスを送信し、レーダ受信装置がレーダ送信装置からの送信パルスに基づく反射パルスに対してコヒーレント積分を行う期間を一般的にCPI(Coherent Processing Interval)と呼ぶ。レーダ受信装置は、1CPI単位でコヒーレント積分された受信信号に対して、その強度を測定し、あるスレッショルド値以上の信号が存在した場合、これを目標信号として検知する。
【0003】
ただし、RCS(Radar Cross Section)の小さい目標の検出は、レーダ受信装置で得られる反射パルスの電力が小さくなる。そのため、低RCSの目標に対しては、1CPI単位での探知処理による目標検出は非常に困難とされてきた。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】E. Fisher, A. H. Heimovich, "Spatial diversity in radar - models and detection Performance", IEEE Trans. On Signal Processing, vol. 54, no. 3, pp. 823-838
【非特許文献2】E. Fisher, A. H. Heimovich, "Performance of MIMO Radar System: Advantages of Angular Diversity", IEEE Trans. On Signal Processing, 2004
【発明の概要】
【発明が解決しようとする課題】
【0005】
以上のように、従来のレーダ装置では、目標が低RCSである場合、目標検出が困難であった。
【0006】
そこで、目的は、目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供することにある。
【課題を解決するための手段】
【0007】
実施形態によれば、レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、全方位に各ビームポジション当り予め設定された期間で複数の送信パルスを送信する。無線部は、前記送信パルスが反射、散乱又は回折された反射パルスを受信する。4次元データ生成部は、前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく目標とレーダとの相対速度とにより特定される4次元データへ変換する。予測部は、前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成する。積分処理部は、前記4次元データ生成部からの前記4次元データと、前記予測部で前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、前記積分結果に基づいて目標を検出する。
【図面の簡単な説明】
【0008】
【図1】第1の実施形態に係るレーダ装置を搭載する移動体が目標を探索する際の図である。
【図2】図1のレーダ装置の機能構成を示すブロック図である。
【図3】図1のアンテナユニットから送信される送信パルスを示す図である。
【図4】図1のパルス圧縮部によるパルス圧縮処理を示す図である。
【図5】図1のドップラフィルタ処理部によるコヒーレント積分を示す図である。
【図6】図1の信号処理部で変換される4次元データのレンジr、方位θ、仰角φ及び相対速度vmの関係を示す図である。
【図7】図1の予測部が目標の存在位置を予測する際の処理を示す図である。
【図8】図1のレーダ装置のシミュレーションにおける諸元を示す図である。
【図9】図1のレーダ装置のシミュレーションにおける目標の諸元を示す図である。
【図10】図1のレーダ装置のシミュレーションにおけるレーダ装置と目標との位置関係を示す図である。
【図11】図10のシミュレーションにおいて、スキャン回数に対する所要SNRと、受信SNRとの推移結果を示す図である。
【図12】従来方式のPPI表示の処理結果と、本実施形態に係る方法によるPPI表示の処理結果を示す図である。
【図13】第2の実施形態に係るレーダ装置の機能構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、実施の形態について、図面を参照して説明する。
【0010】
(第1の実施形態)
図1は、第1の実施形態に係るレーダ装置を搭載する移動体が目標を探索する際の模式図を示す。図1に示す移動体に搭載されたレーダ装置は、ビーム方向を周期的に変化させながら全方位をサーチし、目標を検出する。
【0011】
図2は、第1の実施形態に係るレーダ装置の機能構成を示すブロック図である。図2に示すレーダ装置は、送信装置10、受信装置20、送受信切替器30及びアンテナユニット40を具備する。
【0012】
送信装置10は、信号発生器、デジタル−アナログ変換器、周波数変換器、フィルタ及び増幅器等を備える。送信装置10は、送信パルスを生成し、送受信切替器30を介し、アンテナユニット40から空間へ送信する。
【0013】
図3は、本実施形態のアンテナユニット40から送信される送信パルスの模式図を示す。送信装置10は、1ビームポジション当り、一定のPRI(Pulse Repetation Interval)で複数の送信パルスを送信する。このとき、複数の送信パルスを送信する時間間隔は、目標のレンジセルの移動と、目標の水平面方位角及び仰角の変化とを無視できる時間内に設計される。この時間間隔をCPI(Coherent Processing Interval)と呼ぶ。送信装置10は、CPI毎に異なる方角に送信ビームを向け、アンテナユニット40から送信パルスを送信する。
【0014】
アンテナユニット40から送信された送信パルスは、目標等で反射・散乱・回折され、反射パルスとしてレーダ装置へ到来する。
【0015】
受信装置20は、アンテナユニット40及び送受信切替器30を介して反射パルスを受信する。受信装置20は、図2に示すように、受信モジュール21、4次元データ生成部22、積分処理部23、予測部24、メモリ25及び目標検出部26を備える。
【0016】
受信モジュール21は、周波数変換器及びアナログ−デジタル変換器等を備える。受信モジュール21は、反射パルスを受信し、この反射パルスをベースバンド帯のデジタル形式の受信パルスに変換する。受信モジュール21は、受信パルスを4次元データ生成部22へ出力する。
【0017】
4次元データ生成部22は、空間処理部221、パルス圧縮部222、ドップラフィルタ処理部223及び信号処理部224を備える。
【0018】
空間処理部221は、受信モジュール21からの受信パルスに対して所定のビームウェイトを重畳することで、受信ビームを形成する。空間処理部221は、受信ビームが、CPI毎に変化する送信ビームと同一の方向を向くように、受信パルスに対してビームウェイトを重畳する。
【0019】
パルス圧縮部222は、空間処理部221からの受信パルスに対してパルス圧縮処理を行い、各受信パルスをレンジセル信号へ変換する。図4は、パルス圧縮部222によるパルス圧縮処理を模式的に示す図である。
【0020】
ドップラフィルタ処理部223は、パルス圧縮部222からのレンジセル信号に対してコヒーレント積分を行う。すなわち、ドップラフィルタ処理部223は、受信パルスにおける同一レンジ成分、すなわちレンジセル信号に対してDFT(Discrete Fourier Transform)を行うことにより、レンジセル毎に周波数バンク信号を生成する。図5は、ドップラフィルタ処理部223によるコヒーレント積分を模式的に示す図である。
【0021】
信号処理部224は、ドップラフィルタ処理部223からの周波数バンク信号の信号強度が、レンジr、方位θ、仰角φ及び相対速度vmにより特定されるようにする。つまり、信号処理部224は、所定の捜索領域における全方向への1回のスキャンで得られる全ての周波数バンク信号の信号強度がレンジr、方位θ、仰角φ及び相対速度vmにより特定されるように変換した4次元データを作成する。あるスキャンiで取得された4次元データは、R(i)(r,θ,φ,vm)と表される。図6は、目標に対するレンジr、方位θ、仰角φ及び相対速度vmの関係を示す模式図である。
【0022】
各周波数ビンの周波数帯域幅Δfは、Δf=fPRF/Mで求められる。ここで、周波数ビンの値は目標の移動によるドップラ周波数に起因してのみ生じると仮定する。なお、Mは1CPIで送信されるパルス数であり、fPRF=1/fPRIである。このとき、m番目(mは1〜Mの自然数)の周波数ビンにおける目標の相対的な移動速度vmは、vm=m・Δf・c/fcで表される。ただし、cは光速、fcはキャリア周波数を示す。
【0023】
信号処理部224は、4次元データを積分処理部23及び予測部24へ出力する。
【0024】
予測部24は、信号処理部224から4次元データを受け取り、4次元データの全要素に目標が存在すると仮定する。そして、予測部24は、信号処理部224からの4次元データに基づいて、次のスキャン時の目標の存在位置を予測する。予測部24での処理を以下に説明する。
【0025】
本実施形態に係るレーダ装置は、図1に示すように、所定の捜索領域における全方位に送受信ビームを順次照射し、目標の捜索を行う。このため、同一方向にビームが照射されるのは離散的(1スキャン間隔)になる。1スキャン当りの周期をTSCAN秒とすると、図5に示すレンジセル毎の周波数バンク信号は周期TSCAN毎に得られることになる。
【0026】
目標の運動モデルを等速直線運動と仮定した場合、周波数ビンmに存在する目標は、TSCAN秒後の次スキャン時には目標はvm・TSCANだけ移動していると予測できる。つまり、隣接するレンジセルの間隔をxとおくと、目標は、
【数1】
【0027】
だけ異なるレンジセルに移動することになる。このため、i番目のスキャン時のレンジセルr、周波数ビンmに目標が存在する場合、TSCAN後のi+1番目のスキャン時のレンジセルr+Δn、周波数ビンmに同じ目標が存在すると予測される。図7は、予測部24が目標の存在位置を予測する際の処理を示す模式図である。
【0028】
予測部24は、予測した存在位置に、現在のスキャンにより取得された4次元データの信号強度を割り当てた予測4次元データを作成し、予測4次元データをメモリ25に記憶させる。
【0029】
また、予測部24は、積分処理部23から後述する積分4次元データを受けた場合、この積分4次元データに基づいて、次のスキャン時(TSCAN後)の目標の存在位置を予測する。そして、予測部24は、予測した存在位置に積分4次元データの信号強度を割り当てた予測4次元データを作成し、予測4次元データをメモリ25に記憶させる。
【0030】
積分処理部23は、信号処理部224から4次元データを受け取ると、前のスキャンに基づいて作成された予測4次元データの信号強度をメモリ25から読み出す。そして、積分処理部23は、信号処理部224からの4次元データの信号強度と、メモリ25からの予測4次元データの信号強度とを合成するインコヒーレント積分を行ない、積分4次元データを作成する。なお、レンジセルr1、相対速度vm1での積分4次元データRintは、信号処理部224からの4次元データRと、メモリ25からの予測4次元データRpreとから以下のように求められる。
【数2】
【0031】
ただし、r1=r2+Δnであるとする。積分処理部23は、積分4次元データを目標検出部26及び予測部24へ出力する。
【0032】
目標検出部26は、積分処理部23からの積分4次元データの信号強度が閾値を超えるか否かを判断する。なお、閾値の値は、インコヒーレント積分の回数に基づいて変動する。目標検出部26は、積分4次元データの信号強度が閾値を超える場合、目標を検出したとする。
【0033】
次に、以上のように構成されたレーダ装置の性能評価のシミュレーション結果を示す。図8は本シミュレーションにおけるレーダ装置の諸元を示す図であり、図9は本シミュレーションにおける目標の諸元を示す図である。また、図10は、本シミュレーションにおけるレーダ装置と目標との位置関係を示す図である。なお、本シミュレーションで評価するレーダ装置は、従来方式である1CPIでの探知処理を行った場合、130kmに位置する目標を探知確率PD=0.5、誤警報確率PFA=10−6で検出可能である。
【0034】
図11は、探知確率PD=0.5、誤警報確率PFA=10−6とした場合のスキャン回数(積分処理部23におけるインコヒーレント積分回数)に対する目標探知に必要となる所要SNR(理論値)と、実際のレーダ装置における受信SNRとの推移結果である。
【0035】
グラフに示すとおり、目標の探知に必要となる所要SNRは、スキャン数に相当するインコヒーレント積分数が増加することで低減されていく。また、実際のレーダ装置における受信SNRは、目標がレーダに対して近付いていくため、スキャン数の増加に伴い増加する。なお、所要SNRと受信SNRとが交差する点が目標探知が可能となるスキャン数となる。
【0036】
従来方式である1CPIによる目標探知の所要SNRは約12.8dBであり、これはスキャン数が増加しても変わらない。結果より、従来方式で目標が探知できるスキャン数は所要SNRと受信SNRとが交差する点であり、約42〜43スキャン目となる。なお、レーダ−目標間の距離で換算すると42スキャン目は約125kmとなる。一方、本実施形態に係るレーダ装置ではスキャン数に伴い所要SNRは減少し、受信SNRと交差する点は8〜9スキャン目となる。これをレーダ−目標間の距離で換算すると約210kmとなる。
【0037】
図12は、従来方式と本提案方式のPPI表示(Bスコープ)の処理結果である。結果より、従来方式は約130km付近で目標探知がなされているのに対して、本実施形態に係るレーダ装置では約200km付近から目標探知が実現されていることが確認できる。図12の結果により、本実施形態に係るレーダ装置は、従来のレーダ装置と比較してより遠い距離で目標を探知することが可能であることが確認できる。
【0038】
以上のように、上記第1の実施形態では、周波数バンク信号を(r,θ,φ,vm)により指定される4次元データへ変換する。予測部24は、4次元データの全要素に目標の存在を仮定し、次のスキャンでの目標の存在位置を予測する。そして、積分処理部23は、現在のスキャンにより取得された4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分し積分4次元データを作成するようにしている。これにより、実際に目標が位置する存在位置の信号強度が従来よりも早く積み上がることとなり、目標の検出確率を高めることが可能となる。
【0039】
なお、上記第1の実施形態に係るレーダ装置では、目標が存在し得る位置及び取り得る速度を仮定し、前記仮定した位置及び速度に基づいて極座標信号を4次元データに変換するものとする。
【0040】
したがって、上記第1の実施形態に係るレーダ装置によれば、目標が低RCSである場合であっても、目標を検出することができる。
【0041】
(第2の実施形態)
図13は、第2の実施形態に係るレーダ装置の機能構成を示すブロック図である。図13に示すレーダ装置は、送信装置10、受信装置50、送受信切替器30及びアンテナユニット40を具備する。
【0042】
受信装置50は、受信モジュール21、4次元データ生成部22、尤度算出部51、乗算処理部52、予測部53、メモリ25及び目標検出部54を備える。
【0043】
尤度算出部51は、4次元データ生成部22からの4次元データの信号強度と、予め記憶している受信機雑音の確率密度分布とを比較し、4次元データが受信機の雑音信号である確率を尤度情報として算出する。尤度算出部51は、4次元データの信号強度を尤度情報に変換した4次元尤度データを作成する。尤度算出部51が尤度情報を算出する処理を以下に説明する。
【0044】
受信機雑音をガウス雑音と仮定し、その雑音信号が狭帯域増幅器を通過するものとすれば、その電圧出力の包絡線の確率密度関数は次式のレイリー分布で表される。
【数3】
【0045】
ここで、Aは狭帯域増幅器の出力包絡線の振幅、σNは雑音電圧である。Aiを4次元データR(i)(r,θ,φ,vm)の振幅値とすると、反射パルスが雑音信号である確率(尤度)は次式でもとめられる。
【数4】
【0046】
式4により算出される尤度は、4次元データの各成分に格納される信号が雑音信号であるという確率(尤もらしさ)を表している。つまり、4次元データの信号強度Aiが低い値をとれば、レイリー分布の確率密度分布にしたがい、4次元データは雑音信号である確率が高くなる。一方、4次元データの信号強度Aiが高い値をとれば、雑音信号であるという確率が低くなるので、観測値は目標信号であるという確率が高くなる。尤度算出部51は、作成した4次元尤度データを乗算処理部52及び予測部53へ出力する。
【0047】
予測部53は、尤度算出部51からの4次元尤度データに基づいて、次のスキャン時の目標の存在位置を予測する。つまり、予測部53は、i番目のスキャン時のレンジセルr、周波数ビンmに目標が存在する場合、TSCAN後のi+1番目のスキャン時のレンジセルr+Δn、周波数ビンmに同じ目標が存在すると予測する。予測部53は、予測した存在位置に、現在のスキャンにより取得された4次元尤度データを割り当てた予測4次元尤度データを作成し、予測4次元尤度データをメモリ25に記憶させる。
【0048】
また、予測部53は、乗算処理部52から後述する結合4次元尤度データを受けた場合、この結合4次元尤度データに基づいて、次のスキャン時(TSCAN後)の目標の存在位置を予測する。そして、予測部53は、予測した存在位置に結合4次元尤度データの尤度情報を割り当てた予測4次元尤度データを作成し、予測4次元尤度データをメモリ25に記憶させる。
【0049】
乗算処理部52は、尤度算出部51から4次元尤度データを受け取ると、前のスキャンに基づいて作成された予測4次元尤度データの尤度情報をメモリ25から読み出す。そして、乗算処理部52は、尤度算出部51からの4次元尤度データの尤度情報と、メモリ25からの予測4次元尤度データの尤度情報とを掛け合わせる。なお、結合4次元尤度データPrcombは、尤度算出部51からの4次元尤度データPrと、メモリ25からの予測4次元尤度データPrpreとから以下のように求められる。
【数5】
【0050】
目標検出部54は、乗算処理部52からの結合4次元尤度データの尤度情報が予め設定された誤警報確率を下回るか否かを判断する。目標検出部54は、結合4次元尤度データの尤度情報が誤警報確率を下回る場合、目標を検出したとする。
【0051】
以上のように、上記第2の実施形態では、4次元データの信号強度に基づいて尤度情報を算出し、尤度情報を用いて目標を検出するようにしている。第1の実施形態に係るレーダ装置では、スキャン毎に電力(又は振幅値)を加算するため、その合成値は線形に増加していく。そのため、ダイナミックレンジを広くとる必要がある。第2の実施形態では、尤度情報を用い、目標を確率統計的に検出することにより、ダイナミックレンジの増大を防ぐことが可能となる。
【0052】
したがって、上記第2の実施形態に係るレーダ装置によれば、目標が低RCSである場合であっても、目標を検出することができる。
【0053】
なお、上記第2の実施形態では、受信機内の雑音振幅の確率密度分布をガウシアンと仮定したが、レーダ装置は様々な雑音振幅の確率密度分布を仮定し、尤度の算出に用いるものとする。
【0054】
(その他の実施形態)
なお、上記各実施形態では、目標の高度に関らず、次スキャンでの目標の存在位置を予測する方法について説明した。しかしながら、目標の種類によっては、高度毎に移動速度が制限されるものもある。よって、信号処理部224は、高度毎に速度の絶対値を制限し、制限した速度の範囲内で相対速度vmの値を決定するようにしても良い。これにより、演算量を削減することが可能となる。
【0055】
また、上記各実施形態では、全レーダ領域からの周波数バンクデータを4次元データへ変換するようにしている。しかしながら、必ずしも全レーダ領域からの周波数バンクデータを4次元データへ変換する必要はない。例えば、従来のレーダ動作で目標を探知できるような近距離に対しては変換領域から除外してもよい。このとき、近距離内で取得された周波数バンク信号は目標検出部26へ出力され、信号強度に基づいて目標が検出される。また、近距離内で取得された周波数バンク信号は尤度算出部51へ出力され、信号強度に基づいて尤度が算出される。そして、目標検出部54で、尤度情報に基づいて目標が検出される。
【0056】
また、相対速度vm=m・Δf・c/fcは、レーダの周波数fPRFにより折り返しが生じる可能性がある。その折り返し回数Dは次式で求められる。
【数6】
【0057】
ここで、vは、捜索対象とする目標の実際の速度である。よって、折り返しによる誤った相対速度推定を回避するため、速度ベクトルvは折り返しを補償するよう次元の拡張を図ったものとしてもよい。なお、折り返し次元速度は以下のように構成される。
【数7】
【0058】
ただし、dは折り返し回数を表し、d=d1〜Dである。
【0059】
また、上記各実施形態では、目標の運動モデルを等速直線運動と仮定した場合を例に説明したが、目標の運動モデルは、等速直線運動に限定される訳ではない。
【0060】
また、上記各実施形態では、レーダ装置は送信装置と受信装置とを具備する場合を例に説明した。しかしながら、レーダ装置は必ずしも送信装置と受信装置との両方を具備する必要はない。送信装置と受信装置とが分離して構成されていても構わない。
【0061】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0062】
10…送信装置
20,50…受信装置
21…受信モジュール
22…4次元データ生成部
221…空間処理部
222…パルス圧縮部
223…ドップラフィルタ処理部
224…信号処理部
23…積分処理部
24,53…予測部
25…メモリ
26,54…目標検出部
30…送受信切替器
40…アンテナユニット
51…尤度算出部
52…乗算処理部
【特許請求の範囲】
【請求項1】
全方位に各ビームポジション当り予め設定された期間で複数の送信パルスを送信する送信装置と、
前記送信パルスが反射、散乱又は回折された反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成する予測部と、
前記4次元データ生成部からの前記4次元データと、前記予測部で前のスキャンに基づいて作成された予測4次元データとを積分する積分処理部と、
前記積分結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ装置。
【請求項2】
全方位に各ビームポジション当り予め設定された期間で複数の送信パルスを送信する送信装置と、
前記送信パルスが反射、散乱又は回折された反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データの信号強度に基づいて尤度情報を算出することで、4次元尤度データを作成する尤度算出部と、
前記4次元尤度データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元尤度データを作成する予測部と、
前記尤度算出部からの前記4次元尤度データと、前記予測部で前のスキャンに基づいて作成された予測4次元尤度データとを掛け合わせる乗算処理部と、
前記乗算結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ装置。
【請求項3】
前記4次元データ生成部は、目標の高度に応じて前記相対速度を決定することを特徴とする請求項1又は2記載のレーダ装置。
【請求項4】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記目標検出部へ出力し、
前記目標検出部は、前記周波数バンク信号の信号強度に基づいて目標の検出を行うことを特徴とする請求項1記載のレーダ装置。
【請求項5】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記尤度算出部へ出力し、
前記尤度算出部は、前記周波数バンク信号の信号強度に基づいて尤度情報を算出し、
前記目標検出部は、前記周波数バンク信号の尤度情報に基づいて目標の検出を行うことを特徴とする請求項2記載のレーダ装置。
【請求項6】
前記相対速度は、折り返しを保障するように次元の拡張を図ったものであることを特徴とする請求項1又は2記載のレーダ装置。
【請求項7】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成する予測部と、
前記4次元データ生成部からの前記4次元データと、前記予測部で前のスキャンに基づいて作成された予測4次元データとを積分する積分処理部と、
前記積分結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ受信装置。
【請求項8】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データの信号強度に基づいて尤度情報を算出することで、4次元尤度データを作成する尤度算出部と、
前記4次元尤度データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元尤度データを作成する予測部と、
前記尤度算出部からの前記4次元尤度データと、前記予測部で前のスキャンに基づいて作成された予測4次元尤度データとを掛け合わせる乗算処理部と、
前記乗算結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ受信装置。
【請求項9】
前記4次元データ生成部は、目標の高度に応じて前記相対速度を決定することを特徴とする請求項7又は8記載のレーダ受信装置。
【請求項10】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記目標検出部へ出力し、
前記目標検出部は、前記周波数バンク信号の信号強度に基づいて目標の検出を行うことを特徴とする請求項7記載のレーダ受信装置。
【請求項11】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記尤度算出部へ出力し、
前記尤度算出部は、前記周波数バンク信号の信号強度に基づいて尤度情報を算出し、
前記目標検出部は、前記周波数バンク信号の尤度情報に基づいて目標の検出を行うことを特徴とする請求項8記載のレーダ受信装置。
【請求項12】
前記相対速度は、折り返しを保障するように次元の拡張を図ったものであることを特徴とする請求項7又は8記載のレーダ受信装置。
【請求項13】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信し、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、
前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換し、
前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成し、
前記4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分し、
前記積分結果に基づいて目標を検出することを特徴とする目標検出方法。
【請求項14】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信し、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、
前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換し、
前記4次元データの信号強度に基づいて尤度情報を算出することで、4次元尤度データを作成し、
前記4次元尤度データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元尤度データを作成し、
前記4次元尤度データと、前のスキャンに基づいて作成された予測4次元尤度データとを掛け合わせ、
前記乗算結果に基づいて目標を検出することを特徴とする目標検出方法。
【請求項1】
全方位に各ビームポジション当り予め設定された期間で複数の送信パルスを送信する送信装置と、
前記送信パルスが反射、散乱又は回折された反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成する予測部と、
前記4次元データ生成部からの前記4次元データと、前記予測部で前のスキャンに基づいて作成された予測4次元データとを積分する積分処理部と、
前記積分結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ装置。
【請求項2】
全方位に各ビームポジション当り予め設定された期間で複数の送信パルスを送信する送信装置と、
前記送信パルスが反射、散乱又は回折された反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データの信号強度に基づいて尤度情報を算出することで、4次元尤度データを作成する尤度算出部と、
前記4次元尤度データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元尤度データを作成する予測部と、
前記尤度算出部からの前記4次元尤度データと、前記予測部で前のスキャンに基づいて作成された予測4次元尤度データとを掛け合わせる乗算処理部と、
前記乗算結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ装置。
【請求項3】
前記4次元データ生成部は、目標の高度に応じて前記相対速度を決定することを特徴とする請求項1又は2記載のレーダ装置。
【請求項4】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記目標検出部へ出力し、
前記目標検出部は、前記周波数バンク信号の信号強度に基づいて目標の検出を行うことを特徴とする請求項1記載のレーダ装置。
【請求項5】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記尤度算出部へ出力し、
前記尤度算出部は、前記周波数バンク信号の信号強度に基づいて尤度情報を算出し、
前記目標検出部は、前記周波数バンク信号の尤度情報に基づいて目標の検出を行うことを特徴とする請求項2記載のレーダ装置。
【請求項6】
前記相対速度は、折り返しを保障するように次元の拡張を図ったものであることを特徴とする請求項1又は2記載のレーダ装置。
【請求項7】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成する予測部と、
前記4次元データ生成部からの前記4次元データと、前記予測部で前のスキャンに基づいて作成された予測4次元データとを積分する積分処理部と、
前記積分結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ受信装置。
【請求項8】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信する無線部と、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換する4次元データ生成部と、
前記4次元データの信号強度に基づいて尤度情報を算出することで、4次元尤度データを作成する尤度算出部と、
前記4次元尤度データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元尤度データを作成する予測部と、
前記尤度算出部からの前記4次元尤度データと、前記予測部で前のスキャンに基づいて作成された予測4次元尤度データとを掛け合わせる乗算処理部と、
前記乗算結果に基づいて目標を検出する目標検出部と
を具備することを特徴とするレーダ受信装置。
【請求項9】
前記4次元データ生成部は、目標の高度に応じて前記相対速度を決定することを特徴とする請求項7又は8記載のレーダ受信装置。
【請求項10】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記目標検出部へ出力し、
前記目標検出部は、前記周波数バンク信号の信号強度に基づいて目標の検出を行うことを特徴とする請求項7記載のレーダ受信装置。
【請求項11】
前記4次元データ生成部は、予め設定した近距離内で取得された周波数バンク信号を、前記4次元データへ変換せずに前記尤度算出部へ出力し、
前記尤度算出部は、前記周波数バンク信号の信号強度に基づいて尤度情報を算出し、
前記目標検出部は、前記周波数バンク信号の尤度情報に基づいて目標の検出を行うことを特徴とする請求項8記載のレーダ受信装置。
【請求項12】
前記相対速度は、折り返しを保障するように次元の拡張を図ったものであることを特徴とする請求項7又は8記載のレーダ受信装置。
【請求項13】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信し、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、
前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換し、
前記4次元データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元データを作成し、
前記4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分し、
前記積分結果に基づいて目標を検出することを特徴とする目標検出方法。
【請求項14】
全方位から各ビームポジション当り予め設定された期間で複数の反射パルスを受信し、
前記各ビームポジションの複数の反射パルスに対してレンジ毎にDFT(Discrete Fourier Transform)を行い、周波数ビン毎の周波数バンク信号を生成し、
前記全方位に対する1スキャンにより取得される周波数バンク信号を、前記レンジと、ビームポジションに基づく方位角及び仰角と、前記周波数ビンに基づく相対速度とにより特定される4次元データへ変換し、
前記4次元データの信号強度に基づいて尤度情報を算出することで、4次元尤度データを作成し、
前記4次元尤度データに基づき、次のスキャンにおける目標の存在位置を予測した予測4次元尤度データを作成し、
前記4次元尤度データと、前のスキャンに基づいて作成された予測4次元尤度データとを掛け合わせ、
前記乗算結果に基づいて目標を検出することを特徴とする目標検出方法。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】

【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−163350(P2012−163350A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−21693(P2011−21693)
【出願日】平成23年2月3日(2011.2.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月3日(2011.2.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]