
交流モータ及び交流モータの制御方法
【課題】コイル電流の独立した制御を可能とするインバータ回路を備えた交流モータを提供する。
【解決手段】協働して回転磁界12を発生する3相のステータコイル11U,11V,11Wと、直流電圧+E,−Eおよび接地電圧GNDが印加されて、ステータコイル11U,11V,11Wの各々に直流電流iU,iV,iWを独立して通電するインバータ回路20と、直流電流iU,iV,iWの大きさを所定の周期で制御する制御信号を、インバータ回路20に送信するDSP24と、回転磁界12により回転するロータ13とを備え、制御信号が、第1のスイッチ素子21UU,21VU,21WUおよび第2のスイッチ素子21UD,21VD,21WDの何れか一方をオン状態または両方をオフ状態とすることで、ステータコイル11U,11V,11Wに直流電流iU,iV,iWを独立して通電し、回転磁界12を発生させる。
【解決手段】協働して回転磁界12を発生する3相のステータコイル11U,11V,11Wと、直流電圧+E,−Eおよび接地電圧GNDが印加されて、ステータコイル11U,11V,11Wの各々に直流電流iU,iV,iWを独立して通電するインバータ回路20と、直流電流iU,iV,iWの大きさを所定の周期で制御する制御信号を、インバータ回路20に送信するDSP24と、回転磁界12により回転するロータ13とを備え、制御信号が、第1のスイッチ素子21UU,21VU,21WUおよび第2のスイッチ素子21UD,21VD,21WDの何れか一方をオン状態または両方をオフ状態とすることで、ステータコイル11U,11V,11Wに直流電流iU,iV,iWを独立して通電し、回転磁界12を発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は交流モータに関し、より詳細には、コイル電流の独立した制御を可能とするインバータ回路を備えた、低消費電力の交流モータ及び交流モータの制御方法に関する。
【背景技術】
【0002】
交流モータは、ロータへの電力供給用のブラシを持たず、直流モータと比較してブラシ交換等のメンテナンスが不要である点から、ロボットまたは工作機械等の産業用機械や電気自動車に広く使われている。交流モータの種類には、例えば、誘導モータ、同期モータ、および交流整流子モータがある。
【0003】
例えば3相同期モータでは、120度ずつの角度をおいて3つのステータコイルを配置し、3つのステータコイルの一方の3端子を互いに結合して、例えばY型結線回路を構成する。3つのステータコイルの他方の3端子に3相交流電流を通電することで回転磁界を発生させ、モータの中央に位置する永久磁石のロータを回転させる。3相同期モータは、電力供給線が3本で済む点や、モータの始動性の点から、交流モータとしてよく使用されている。
【0004】
一方、半導体素子が発達した現代では、デジタル技術の発達により、直流電源を入力に使うことが多い。また、動力源としてモータを電気自動車に搭載する場合にも、モータ用の電源が直流電源(バッテリー)であることが要求される。そのため、近年では、ステータコイルに3相交流電流を通電することはせず、トランジスタを利用したオン/オフ回路(即ち、インバータ回路)を用いて、擬似的な3相交流電流を発生させている。
【0005】
インバータ回路を用いて制御を行う同期モータの基本的な構造および駆動方法は周知であり、例えば下記特許文献1には、3相同期モータの簡便な駆動方法である「120度通電駆動」が記載されている。3相インバータは、ステータコイルに流れる電流の向きを制御する2つのスイッチ素子を各相毎に備え、120度通電駆動の場合、3相インバータのいずれか1相は、2つのスイッチ素子が両方ともオフに固定された無通電状態になる。
【0006】
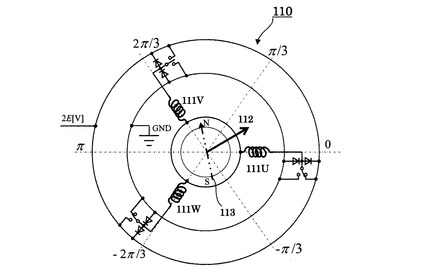
図22に、従来技術に係る例示的な3相同期モータの概略構成図を示す。図22に示す3相同期モータ110では、3つのステータコイルの各々の一方の3端子を互いに結合してY型結線回路を構成し、3相交流電流に代えて、3つのステータコイル111U,111V,111Wの各々の他方の3端子に、1つの直流電圧2Eを印加する。上記した「120度通電駆動」を実現するために、図22に示す3相同期モータ110では、直列回路をなす2つのステータコイル(例えば、111U,111Vとする)に直流電流を通電し、この直流電流のオン/オフ時間の長さで電流を調節することで、擬似的な3相交流電流を発生させている。擬似的な3相交流電流により発生した回転磁界112は、モータ110の中央に位置するロータ113を回転させる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−151351号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来技術に係る3相同期モータでは、電力供給線の原料である高価な銅の使用量を減らすことを目的として、電力供給線が3本に制限されている。また、デジタル技術の発達により、直流電源を入力に使用するという制限が生じている。これら制限の下で、従来技術に係る3相同期モータ110が120度通電駆動を行うためには、直列回路をなす2つのステータコイル111U,111Vに、同じ強さの電流を同じ時間通電しなくてはならない。これがモータの消費電力を増大させる原因となっている。
【0009】
さらに、2つのステータコイルが120度の角度差で配置されるので、これら2つのステータコイルが作る合成磁界の大きさは常に、1つのステータコイルが形成する磁界強度の2倍以下となり、モータが出力するトルクの発生効率を減少させている。
【0010】
本発明は、上記課題を解決するためになされたものであり、その目的は、目的とする方向および強さを有する最低限の電流を通電することで消費電力を節約し、トルクの発生効率を増大させることができる、コイル電流の独立した制御を可能とするインバータ回路を備えた交流モータ及び交流モータの制御方法を提供することにある。
【課題を解決するための手段】
【0011】
上記目的の達成のために、本発明に係る交流モータ(1)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧であり、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする。
【0012】
また、本発明に係る交流モータ(2)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電し、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする。
【0013】
また、本発明に係る交流モータ(3)は、前記した交流モータ(1)または(2)において、前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする。
【0014】
また、本発明に係る交流モータ(4)は、前記した交流モータ(1)〜(3)のいずれかにおいて、前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする。
【0015】
また、本発明に係る交流モータの制御方法(5)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧である、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする。
【0016】
また、本発明に係る交流モータの制御方法(6)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電する、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする。
【0017】
また、本発明に係る交流モータの制御方法(7)は、前記した交流モータ(5)または(6)において、前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする。
【0018】
また、本発明に係る交流モータの制御方法(8)は、前記した交流モータ(5)〜(7)のいずれかにおいて、前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする。
【発明の効果】
【0019】
本発明によると、交流モータの各コイルに独立して電流を流すことができるので、目的とする方向および強さを有する最低限の電流を各コイルに通電することで、モータの消費電力を低減することができる。
【0020】
また、本発明によると、交流モータの各コイルに独立して電流を流すことができるので、通電可能な最大の電流を各コイルに通電することで、得られる磁束の強さが増大し、モータが発生する最大トルクを増大させることができる。モータの出力トルクは磁束の強さに比例するので、モータの出力トルクが増大し、例えば電気自動車の発進時の加速度を上げることができる。
【0021】
また、本発明の制御方法によると、得られる回転磁界の大きさを、従来の制御方法により得られる回転磁界の大きさと同じにする場合、本発明の制御方法では、各々のステータコイルが発生する磁界が互いに打ち消す割合が少なくなるようにコイル電流を流す制御をするので、従来の制御方法と比較して、消費電力を低減することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施の形態に係る同期モータの概略構成図である。
【図2】本発明の実施の形態に係る同期モータを制御するインバータ回路の回路図である。
【図3】本発明の実施の形態に係る同期モータの駆動方法(a)と従来技術に係る同期モータの駆動方法(b)(c)とを示す概略図である。
【図4】同じ大きさの磁束Φcを発生させる場合の消費電力の比率を消費電力Paを基準として示すグラフである。
【図5】コイル電流の大きさをICに制限した場合に得られる最大の合成磁束ΦCを示すグラフである。
【図6】各コイルに独立して電流を流すことにより磁束を回転させる場合の、コイルを流れる電流を説明する図である。
【図7】各コイルに独立して電流を流すことにより磁束を回転させる場合の、コイルU,V,Wを流れるコイル電流iU,iV,iWのタイミング図である。
【図8】直列接続された2つのコイルに電流を流す場合の、PWM制御の2種類のデューティー比を説明するタイミング図である。
【図9】一定の大きさの磁束Φdが角速度ωで1回転する際に要する電気エネルギーの比率を、電気エネルギーWraを基準として示すグラフである。
【図10】原理的な考察により回転磁束の方向毎に得られた電気エネルギーの低減率を示す模式図である。
【図11】回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図12】回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図13】回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図14】回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図15】原理的な考察により回転磁束の方向毎に得られた磁束の強さの増大率を示す模式図である。
【図16】回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図17】回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図18】回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図19】回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図20】1つのコイルを制御する公知の単相用インバータ回路の一例を示す図である。
【図21】インバータ回路の消費電力と同期モータの発生トルクとの比率を、インバータ回路の電源電圧の変化毎に測定した結果を示すグラフである。
【図22】従来技術に係る例示的な3相同期モータの概略構成図である。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を、添付の図面を参照して詳細に説明する。尚、以下の説明及び図面において、同じ符号は同じ又は類似の構成要素を示すこととし、よって、同じ又は類似の構成要素に関する説明を省略する。
【0024】
以下では、(1)本発明の実施の形態に係る同期モータと、同期モータを制御するインバータ回路とを概略的に説明したうえで、(2)同期モータの駆動方法、および(3)磁束の回転方法を詳細に説明する。
【0025】
(1)同期モータおよびインバータ回路の概略構成
図1に、本発明の実施の形態に係る同期モータの概略構成図を示す。図1に示すように、本発明の同期モータ10はインバータ回路を備え、インバータ回路は、2本の電力線から供給される正負の直流電圧(+E又は−E)によって擬似的な3相交流電流を発生させ(3本の電力線)、且つ、電流の戻りラインとして3つのステータコイル11U,11V,11WのY型結線結合の中心点からも電力線(GND)を引き出し、合計4本の電力線で各コイル電流を独立して制御する。インバータ回路が、3つのステータコイル11U,11V,11Wのコイル電流iU,iV,iWを独立して制御することで回転磁界12を発生させ、モータ10の中央に位置するロータ13を回転させる。回転磁界の発生方法については、後述する「(3)磁束の回転方法」にて詳細に説明する。
【0026】
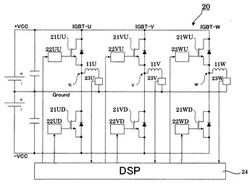
図2に、図1に示す本発明の実施の形態に係る同期モータを制御するインバータ回路の回路図を示す。インバータ回路20は、6つの半導体スイッチ21UU,21UD,21VU,21VD,21WU,21WDと、6つのフォトカプラ22UU,22UD,22VU,22VD,22WU,22WDと、3つの電流センサ23U,23V,23Wとを備える。各々の半導体スイッチは、絶縁ゲートバイポーラトランジスタ(以下、IGBTと記す)と、IGBTのエミッタ−コレクタ間に接続された還流ダイオードとから構成されている。
【0027】
図2に示すように、インバータ回路20の上半分のブロックに記載した半導体スイッチ21UU,21VU,21WUの各々には、正の直流電圧(+E)が印加され、下半分のブロックに記載した半導体スイッチ21UD,21VD,21WDの各々には、負の直流電圧(−E)が印加される。6つの半導体スイッチの各々のゲートには、6つのフォトカプラが各々接続される。これら6つのフォトカプラの各々は、PWM(Pulse Width Modulation)制御用の信号をデジタル・シグナル・プロセッサ(DSP)24から受信して、6つの半導体スイッチの各々のオン/オフ時間を制御する。
【0028】
図2に示すインバータ回路20は、3つのステータコイル11U,11V,11Wのコイル電流iU,iV,iWをそれぞれ独立に制御する。一例として、図2に示す構成のうち、ステータコイル11Uのコイル電流iUを制御する構成について説明する。対を成す半導体スイッチ21UU,21UDは、ノードuにて直列に接続され、ステータコイル11Uは、一端がノードuに接続され、他端が電力供給線GNDに接続される。電流センサ23Uは、ステータコイル11Uと電力供給線GNDとの間に接続されて、DSP24へコイル電流の大きさをフィードバックする。
【0029】
対を成す2つの半導体スイッチ21UU,21UDは、いずれか一方がターンオンする。半導体スイッチ21UUがターンオンすると、ステータコイル11Uにコイル電流iUの正電流が通電し、半導体スイッチ21UDがターンオンすると、ステータコイル11Uにコイル電流iUの負電流が通電する。
【0030】
ステータコイル11Vについても同様に、対を成す半導体スイッチ21VU,21VDがノードvにて直列に接続され、ステータコイル11Vの一端がノードvに接続され、他端が電力供給線GNDに接続される。ステータコイル11Wについても同様に、対を成す半導体スイッチ21WU,21WDがノードwにて直列に接続され、ステータコイル11Wの一端がノードwに接続され、他端が電力供給線GND側に接続される。このように、本発明の実施の形態に係る同期モータ10のインバータ回路20では、3つのステータコイル11U,11V,11Wの一端が電力供給線GNDに共通に接続されることで、各コイル電流iU,iV,iWの大きさを独立して制御することができる。
【0031】
(2)同期モータおよびインバータ回路の駆動方法
次に、図3を参照して、本発明の実施の形態に係る同期モータの駆動方法と従来技術に係る同期モータの駆動方法との間で、同じ大きさの磁束を発生させる場合の各々の消費電力を比較する。
【0032】
図3は、本発明の実施の形態に係る同期モータの駆動方法と従来技術に係る同期モータの駆動方法とを示す概略図である。(a)は、本発明の実施の形態に係る同期モータの駆動方法を示す概略図であり、(b)および(c)は何れも、従来技術に係る同期モータの駆動方法を示す概略図である。これら(a)〜(c)に示す何れの駆動方法であっても、擬似的な3相交流電流を発生させる。なお、合成磁束Φの向きは、図3(b)又は後述する図6中に示すように、図中の水平線方向を基準とし、半時計回り方向を正の回転方向とする。コイルU,V,Wに流れる各々の電流は、例えばPWMにより制御される。
【0033】
ケース(a):各コイルに独立して電流を流す場合
本発明の実施の形態に係る同期モータの駆動方法では、各コイルに独立して電流を流す。例えば、図3(a)に示すように、最も簡単なケースとして、1つのコイルUだけに電流を流すケースを考える。いま、直流電圧E[V]をコイルの両端に印加すると、コイルに電流IC[A]が流れ、コイル電流ICにより磁束ΦC[Wb]が生成されるとする。
【0034】
コイルUに流れるコイル電流Iuは、Iu=ICであり、
IC=E/R (1)
となる。R[Ω]はコイルUの抵抗値である。コイル電流ICにより生成される磁束ΦC[Wb]は、
ΦC=KBIC (2)
となる。KBはコイル定数である。よって、磁束ΦCを生成するために必要な電力Pa[W]は、
Pa=EIC=EΦC/KB (3)
となる。
【0035】
ケース(b):直列接続された2つのコイルの両方に電流を流す場合
従来技術に係る120度通電駆動では、Y型結線回路を構成する3つのコイルのうち、直列接続された2つのコイルの両方に電流を流す。例えば、図3(b)に示すように、コイルU,Wの両端に直流電圧2E[V]を印加する。コイルU,Wに流れる電流Iu,Ivは、それぞれIu=Ic/√3[A]、Iw=−Ic/√3[A]となる。ここで、直列接続された2つのコイルの接続ノードに流れる方向を正とし、接続ノードから流出する方向を負としている(以下同様)。2つのコイルU,Wに流れる電流の方向を考慮すると、2つのコイルU,Wは互いにπ/3ずつ向きが違うので、コイルU,Wが生成する2つの磁束の合成磁束Φは、sin(π/3)・ΦC/√3+sin(π/3)・ΦC/√3=ΦCとなり、各コイルに独立して電流を流す場合(a)と同じ大きさの磁束を得ることができる。即ち、PWM制御により平均コイル電流をIC/√3に設定すると、π/6[rad]の方向に合成磁束ΦC[Wb]を生成する。よって、磁束ΦCを生成するために必要な電力Pb[W]は、
Pb=(2/√3)EIC (4)
となる。
【0036】
ケース(c):3つのコイルの全てに電流を流す場合
ケース(c)では、Y型結線回路を構成する3つのコイルの全てに電流を流す。例えば、図3(c)に示すように、並列に接続した2つのコイルV,Wに、さらにコイルUを直列に接続する。直列関係にあるコイルU,Wの両端には直流電圧2E[V]を印加し、且つ、直列関係にあるコイルU,Vの両端にも直流電圧2E[V]を印加する。合成磁束ΦC[Wb]を生成する場合のコイルU,V,Wの各々に流れる電流Iu,Iv,Iwは、それぞれIu=(2/3)IC[A]、Iv=−(1/3)IC[A]、Iw=−(1/3)IC[A]となる。よって、磁束ΦCを生成するために必要な電力Pc[W]は、
Pc=(4/3)EIC (5)
となる。
【0037】
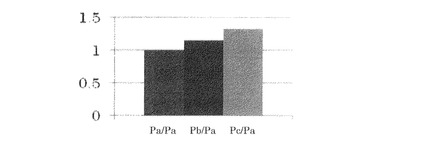
図4は、同じ大きさの磁束Φcを発生させる場合の消費電力の比率を消費電力Paを基準として示すグラフである。図4に示すように、各コイルに独立して電流を流すケース(a)の消費電力Paの比率(Pa/Pa)は、直列接続された2つのコイルの両方に電流を流すケース(b)の消費電力Pbの比率(Pb/Pa)、および、3つのコイルの全てに電流を流すケース(c)の消費電力Pcの比率(Pc/Pa)のどちらよりも低い値を示す。消費電力の低減率は、約15%〜約33%(2/√3〜4/3)である。
【0038】
図5は、コイル電流の大きさをICに制限した場合に得られる最大の合成磁束ΦCを示すグラフである。図5に示すように、各コイルに独立して電流を流すケース(a)(3つのコイルに同時に電流ICを流す)の合成磁束ΦCが、直列接続された2つのコイルの両方に電流を流すケース(b)(2つのコイルに同時に電流ICが流れる)の合成磁束、および3つのコイルの全てに電流を流すケース(c)(1つのコイルに電流ICが流れ、残りの2つのコイルにはそれぞれ電流IC/2が流れる)の合成磁束のどちらよりも高い値を示す。
【0039】
(3)磁束の回転方法
(3−1)磁束を回転させる原理
次に、本発明の実施の形態に係る同期モータにおいて磁束を回転させる方法を詳細に説明する。上記した「(2)同期モータおよびインバータ回路の駆動方法」にて説明したように、本発明の実施の形態に係る同期モータの駆動方法(ケース(a))では、各コイルに独立して電流を流す。コイル電流の大きさおよび位相の制御は、例えば周知のPWM制御により行う。
【0040】
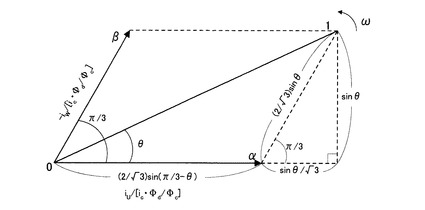
図6は、各コイルに独立して電流を流すことにより磁束を回転させる場合の、コイルを流れる電流を説明する図である。今、2本のコイル(例えば、コイルU,Wとする)に独立して電流(コイル電流iU,iW)を流すことにより、大きさΦd[Wb]の磁束を生成し、この磁束Φdを、角度θ[rad]方向に、角速度ω[rad/s]でπ/3[rad]回転させることを考える。生成される回転磁束は大きさΦdで一定であり、コイル電流iU,iWの大きさは角度θの関数である。
【0041】
コイルU,Wの各々を流れるコイル電流iU(θ)[A],iW(θ)[A]は次の通りとなる。
【0042】
iU(θ)= α(θ)(Φd/Φc)Ic
iW(θ)=−β(θ)(Φd/Φc)Ic (6)
ここで、α(θ)(Φd/Φc)およびβ(θ)(Φd/Φc)は、図6に示す磁束の回転を得るための、PWM制御のサイクル時間T[s]についてのデューティー比であり(図8参照)、
α(θ)=(2/√3)[(√3/2)cosθ−(1/2)sinθ]
=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ θ=ωt (7)
である。最初にπ/3回転させる間は、コイルVには電流を流さないので、iV(θ)=0である。
【0043】
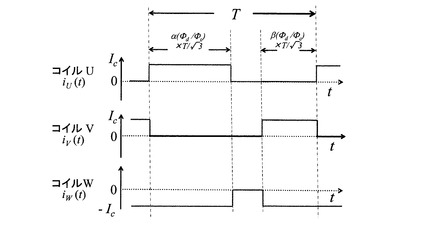
図7は、各コイルに独立して電流を流すことにより磁束を回転させる場合(ケース(a))の、コイルU,V,Wを流れるコイル電流iU,iV,iWのタイミング図である。
【0044】
図7に示す1サイクルは2π周期である。サイクルの1番目の期間である0〜π/3の期間では、コイル電流iU,iV,iWの大きさは、上記した式(6)(7)に従って変化する。即ち、コイル電流iU(θ)は、大きさ((Φd/Φc)Icを基準とした相対値)1から0へsin(π/3−θ)に従って単調減少し、コイル電流iV(θ)は大きさ0のままで変化せず、コイル電流iW(θ)は、大きさ0から−1へ−sinθに従って単調減少する。
【0045】
次に、2番目の期間であるπ/3〜2π/3の期間では、コイル電流iU(θ)は大きさ0のままで変化せず、コイル電流iV(θ)は、大きさ0から1へsin(θ+π/3)に従って単調増加し、コイル電流iW(θ)は、大きさ−1から0へ−sinθに従って単調増加する。
【0046】
さらに、3番目の期間である2π/3〜πの期間では、コイル電流iU(θ)は、大きさ0から−1へsin(π/3−θ)に従って単調減少し、コイル電流iV(θ)は、大きさ1から0へsin(θ+π/3)に従って単調減少し、コイル電流iW(θ)は大きさ0のままで変化しない。以後、回転磁束Φdが1回転する間、コイル電流iU(θ),iV(θ),iW(θ)の大きさは、図7に示すタイミング図に従って変化する。
【0047】
(3−2)回転磁束の電気エネルギー
回転磁束の電気エネルギーを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)と、3つのコイルの全てに電流を流すケース(c)とで比較する。
【0048】
(3−2−1)コンピュータ・シミュレーションによる考察
ケース(a):各コイルに独立して電流を流す場合
磁束Φdが角速度ω=1[rad/s]でπ/3[rad]回転した場合のコンピュータ・シミュレーションによる電気エネルギーWsa[W・s]は、
Wsa=1.17EIc/ω (8)
となる。よって、磁束Φdの1回転(2π)に要する電気エネルギーWra「W・s」は、Wsaの6倍となり、
Wra=7.0EIc/ω (9)
となる。
【0049】
ケース(b):直列接続された2つのコイルの両方に電流を流す場合
コイルU,V,Wの各々を流れるコイル電流iU(θ),iV(θ),iW(θ)は次の通りとなる。
【0050】
iU(θ)= α(θ−π/6)(Φd/Φc)Ic/√3
iV(θ)= β(θ−π/6)(Φd/Φc)Ic/√3
iW(θ)=−α(θ−π/6)(Φd/Φc)Ic/√3 − β(θ−π/6)(Φd/Φc)Ic/√3 θ=π/6 →π/2 (10)
コイル電流の各々を増大させるために、2種類のデューティー比α(Φd/Φc)/√3およびβ(Φd/Φc)/√3が設定されている。図8は、直列接続された2つのコイルに電流を流す場合の、PWM制御の2種類のデューティー比を説明するタイミング図である。
【0051】
磁束Φdの1回転に要する電気エネルギーWrb[W・s]は、コンピュータ・シミュレーションによると、
Wrb=8.08EIc/ω (11)
となる。
【0052】
ケース(c):3つのコイルの全てに電流を流す場合
磁束Φdの1回転に要する電気エネルギーWrc[W・s]は、コンピュータ・シミュレーションによると、
Wrc=9.34EIc/ω (12)
となる。
【0053】
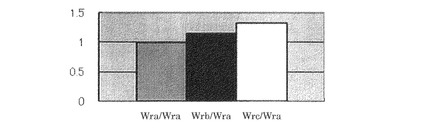
図9は、一定の大きさの磁束Φdが角速度ωで1回転する際に要する電気エネルギーの比率を、電気エネルギーWraを基準として示すグラフである。図9に示すように、各コイルに独立して電流を流すケース(a)の電気エネルギーWraの比率(Wra/Wra)は、直列接続された2つのコイルの両方に電流を流すケース(b)の電気エネルギーWrbの比率(Wrb/Wra)、および、3つのコイルの全てに電流を流すケース(c)の電気エネルギーWrcの比率(Wrc/Wra)のどちらよりも低い値を示す。電気エネルギーの低減率は、約15〜約30%である。
【0054】
(3−2−2)原理的な考察
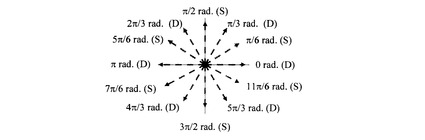
図10は、原理的な考察(PWM制御下での電磁気学的な考察)により回転磁束の方向毎に得られた電気エネルギーの低減率を示す模式図である。図10中に文字(D)または文字(S)で示す電気エネルギーの低減率は、直列接続された2つのコイルの両方に電流を流すケース(b)の電気エネルギーを基準として、各コイルに独立して電流を流すケース(a)の電気エネルギーについて示すものである。文字(D)は、ケース(b)に対するケース(a)の電気エネルギーの低減率が30%であることを意味し、文字(S)は、ケース(a)の電気エネルギーの消費がケース(b)の電気エネルギーの消費と同じであることを意味する。
【0055】
図10に示すように、回転磁束の方向が0、π/3、2π/3、π、4π/3、および5π/3[rad]の場合には、ケース(a)の電気エネルギーの低減率は30%となり、回転磁束の方向がπ/6、π/2、5π/6、7π/6、3π/2、および11π/6[rad]の場合には、ケース(a)の電気エネルギーの消費はケース(b)の電気エネルギーの消費と同じになる。したがって、回転磁束が1回転する際の平均を見ると、電気エネルギーの低減率は約15%となる。
【0056】
原理的な考察により、回転磁束の電気エネルギーを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とで比較する。考察は、ケース(b)に対するケース(a)の電気エネルギーの低減率が30%となる場合の一例として、回転磁束の方向が0[rad]の場合と、ケース(a)の電気エネルギーの消費がケース(b)の電気エネルギーの消費と同じとなる場合の一例として、回転磁束の方向がπ/3[rad]の場合とに対して行う。
【0057】
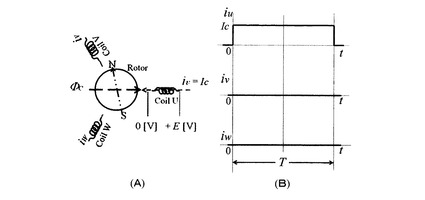
図11は、回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0058】
コイル電流ICにより生成される磁束ΦC[Wb]は、
ΦC=KBIC (13)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWa0[W・s]は、
Wa0=ICET (14)
となる。
【0059】
図12は、回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0060】
図12の(A)に示すように、ケース(b)の駆動方法では、2通りの電流の流し方を組み合わせて、0[rad]方向に回転磁束を生成している。これは、図12の(B)に示すように、ケース(b)では、2つのコイルに同じ強さの電流を同じ時間通電しなくてはならないという制限があるためである。
【0061】
コイル電流ICにより生成される磁束ΦCは、
ΦC=KB(1/3+1/3+1/6+1/6)IC
=KBIC (15)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWb0[W・s]は、
Wb0=ICE(1/3+1/3+1/3+1/3)T
=4/3ICET (16)
となる。
【0062】
回転磁束の方向が0[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、電気エネルギーの消費を比較する。式(14)および式(16)を比較すると、式(14)に示すケース(a)の駆動方法による電気エネルギーは、式(16)に示すケース(b)の駆動方法による電気エネルギーの3/4倍である。即ち、回転磁束の方向が0[rad]である場合の、ケース(b)に対するケース(a)の電気エネルギーの低減率は、約30%である。
【0063】
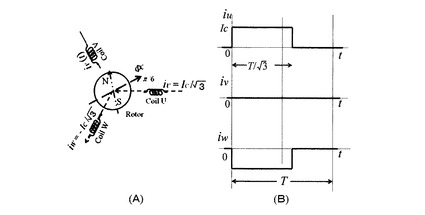
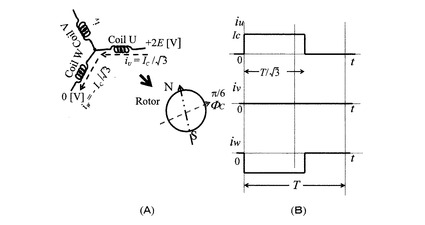
図13は、回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0064】
コイル電流ICにより生成される磁束ΦCは、
ΦC=KB(1/√3×√3/2+1/√3×√3/2)IC
=KBIC (17)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWaπ/6[W・s]は、
Waπ/6=ICE(1/√3+1/√3)T
=2/√3ICET (18)
となる。
【0065】
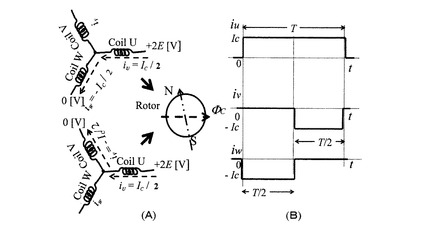
図14は、回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0066】
コイル電流ICにより生成される磁束ΦCは、
ΦC=KB(1/√3×√3/2+1/√3×√3/2)IC
=KBIC (19)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWbπ/6[W・s]は、
Wbπ/6=ICE(1/√3+1/√3)T
=2/√3ICET (20)
となる。
【0067】
回転磁束の方向がπ/6[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、電気エネルギーの消費を比較する。式(18)および式(20)を比較すると、式(18)に示すケース(a)の駆動方法による電気エネルギーは、式(20)に示すケース(b)の駆動方法による電気エネルギーと同じ大きさである。即ち、回転磁束の方向がπ/6[rad]である場合の、ケース(a)の電気エネルギーの消費は、ケース(b)の電気エネルギーの消費と同じである。
【0068】
(3−3)回転磁束の最大の強さ
原理的な考察により、回転磁束の最大の強さを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とで比較する。ここで、得られる回転磁束の強さとは、ケース(a)およびケース(b)の各々のケースにおいて、PWM制御下で通電可能な最大の電流を各コイルに流すことにより得られる所望の回転磁束の最大の強さを意味する。
【0069】
図15は、原理的な考察(PWM制御下での電磁気学的な考察)により回転磁束の方向毎に得られた磁束の強さの増大率を示す模式図である。図15中に文字(U)または文字(S)で示す磁束の強さの増大率は、直列接続された2つのコイルの両方に電流を流すケース(b)の磁束の強さを基準として、各コイルに独立して電流を流すケース(a)の磁束の強さについて示すものである。文字(U)は、ケース(b)に対するケース(a)の磁束の強さの増大率が15%であることを意味し、文字(S)は、ケース(a)の磁束の強さがケース(b)の磁束の強さと同じであることを意味する。
【0070】
図15に示すように、回転磁束の方向が0、π/3、2π/3、π、4π/3、および5π/3[rad]の場合には、ケース(a)の磁束の強さの増大率は15%となり、回転磁束の方向がπ/6、π/2、5π/6、7π/6、3π/2、および11π/6[rad]の場合には、ケース(a)の磁束の強さはケース(b)の磁束の強さと同じになる。したがって、回転磁束が1回転する際の平均を見ると、磁束の強さの増大率は約7.5%となる。
【0071】
原理的な考察により、回転磁束の強さを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とで比較する。考察は、ケース(a)の磁束の強さがケース(b)の磁束の強さと同じとなる場合の一例として、回転磁束の方向がπ/3[rad]の場合と、ケース(b)に対するケース(a)の磁束の強さの増大率が15%となる場合の一例として、回転磁束の方向が0[rad]の場合とに対して行う。
【0072】
図16は、回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0073】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB(1×√3/2+1×√3/2)IC
=√3KBIC (21)
となる。
【0074】
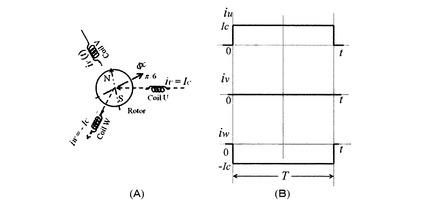
図17は、回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0075】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB(1×√3/2+1×√3/2)IC
=√3KBIC (22)
となる。
【0076】
回転磁束の方向がπ/6[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、磁束の強さを比較する。式(21)および式(22)を比較すると、式(22)に示すケース(a)の駆動方法により得られる磁束の強さは、式(21)に示すケース(b)の駆動方法により得られる磁束の強さと同じである。即ち、回転磁束の方向がπ/6[rad]である場合の、ケース(a)の磁束の強さは、ケース(b)の磁束の強さと同じである。
【0077】
図18は、回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0078】
図18の(A)に示すように、ケース(b)の駆動方法では、2通りの電流の流し方を組み合わせて、0[rad]方向に回転磁束を生成している。これは、図18の(B)に示すように、ケース(b)では、2つのコイルに同じ強さの電流を同じ時間通電しなくてはならないという制限があるためである。
【0079】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB(1/2+1/2+1/4+1/4)IC
=1.5KBIC (23)
となる。ケース(b)では、2つのコイルには同時にIC/2の大きさのコイル電流しか流せないので、1.5KBICの強さの磁束しか生成できない。
【0080】
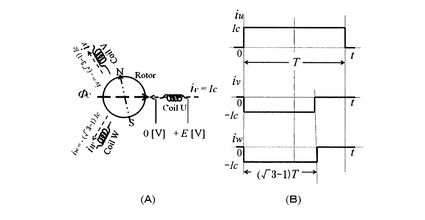
図19は、回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0081】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB{1+(√3ー1)/2+(√3ー1)/2}IC
=√3KBIC (24)
となる。
【0082】
回転磁束の方向が0[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、磁束の強さを比較する。式(23)および式(24)を比較すると、式(24)に示すケース(a)の駆動方法により得られる磁束の強さは、式(23)に示すケース(b)の駆動方法により得られる磁束の強さの(√3/1.5=1.15・・・)倍である。即ち、回転磁束の方向が0[rad]である場合の、ケース(b)に対するケース(a)の磁束の強さの増大率は、約15%である。
【0083】
なお、ケース(a)の駆動方法を用いる場合の、回転磁束の方向が0[rad]〜π/6[rad]の間の磁束ΦCについては、補間によって計算することが可能である。
【0084】
また、例えば、回転磁束の方向がπ/3[rad]より大きい角度を向く場合の磁束ΦCについては、PWM制御の1周期について、例えばコイルWには、T[秒]の間電流ICを通電し、コイルU,Vには、(√3−1)T[秒]の間電流ICを通電することで発生させる。
【0085】
また、例えば、回転磁束の方向が0[rad]〜π/3[rad]の間の角度を向く場合の磁束ΦCについては、PWM制御の1周期について、例えばコイルUにαT+β(√3−1)T[秒]の間電流ICを通電し、且つ、コイルWにα(√3−1)T+βT[秒]の間電流ICを通電し、且つ、コイルVに |−α(√3−1)+β(√3ー1)|T の間電流ICを通電することで発生させる。
【0086】
以上、本発明を特定の実施の形態によって説明したが、本発明は上記した実施の形態に限定されるものではない。
【0087】
上記実施の形態では、回転磁界を発生する方法を同期モータを一例として説明しているが、回転磁界を利用するモータであれば他の種類のモータであってもよい。例えば、同期モータに代えて誘導モータであってもよく、即ち交流モータであればよい。
【0088】
また、上記実施の形態では、3相の同期モータを使用しているが、相の数は3相に限られず、3相以上の多相であってもよい。例えば、上記実施の形態で説明した3相のインバータ回路をN/3(Nは3の倍数)セット用意して、N相の同期モータを構成すればよい。この場合、合計N個のステータコイルを2π/Nの間隔で等間隔で配置すればよく、各ステータコイルに流すコイル電流のタイミングも、図7のタイミング図を参照して、インバータ回路の各セット毎に、半導体スイッチのオン/オフ時間を適宜設定すればよい。
【0089】
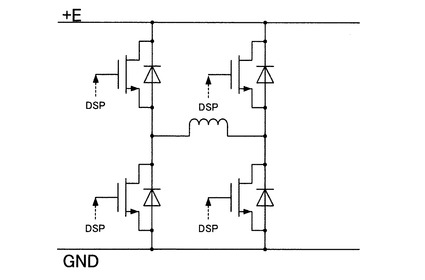
また、上記実施の形態では、3つのステータコイルのコイル電流をそれぞれ独立に制御するインバータ回路として、図2に示すインバータ回路20を用いているが、この図2に示すインバータ回路20に代えて、例えば図20に示す、1つのコイルを制御する公知の単相用インバータ回路を3つ用いて、各ステータコイルを独立に制御してもよい。この場合、単相用インバータ回路には、直流電圧(+E)と接地電圧(GND)とが印加され、電源は1つ(+E)で済むが、半導体スイッチ(例えば、IGBT)の数は、倍の12個を必要とする。
【0090】
また、上記実施の形態では、インバータ回路20の制御にPWM方式を用いているが、インバータ回路20内の半導体スイッチのオン/オフ動作を制御することができれば、他のパルス変調方式であってもよい。
【0091】
また、上記実施の形態では、PWM制御用の信号をDSP24がインバータ回路20へ送信しているが、DSP24に代えて、デジタル信号処理が可能なマイクロ・プロセッサであってもよい。
【0092】
また、本発明の同期モータを電気自動車に搭載する場合には、電気自動車の走行状況(例えば、速度、道路の勾配)に応じて、同期モータの制御方法を適宜変更すれば良い。例えば、電気自動車が平坦な高速道路を一定の速度で走行する状況では、同期モータは高いトルクを発生する必要が無いので、後述する実施例にて示す、単位発生トルクあたりの消費電力が低いケース(a)の制御方法で同期モータを制御すれば良い。
【実施例】
【0093】
以下に、本発明の実施例を示し、本発明の特徴をより明確にする。
【0094】
図21は、インバータ回路の消費電力と同期モータの発生トルクとの比率を、インバータ回路の電源電圧の変化毎に測定した結果を示すグラフである。消費電力および発生トルクの測定は、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とに対して行った。また、測定は、インバータ回路の電源電圧の大きさ(+E[V]、−E[V])を、E=8[V]、7[V]、6[V]に変化させて行った。
【0095】
本発明のインバータ回路20を有する同期モータ10と、発生トルク測定用のDCモータとを用意し、同期モータ10の回転軸とDCモータの回転軸とを互いに接続した。インバータ回路20はDSP24によりPWM制御され、PWM制御の周波数は500[Hz]であり、DSP24の制御周期は2[kHz]であった。
【0096】
測定は次の手順で行った。まず、インバータ回路20に所定の大きさの電源電圧を印加して、同期モータ10を一定の速度で回転させたうえで、電源の出力電流isu,islを測定し、これら出力電流の測定値から、同期モータ10の消費電力Pを算出した。次に、DCモータを駆動して同期モータ10の回転を停止させ、回転が停止した際のDCモータへの入力電流iDCの測定値から、同期モータ10の最大トルクQを算出した。測定および算出結果を表1に示す。
【0097】
【表1】

【0098】
表1中の値P/Qは、消費電力と発生トルクとの比率である。各コイルに独立して電流を流す場合(a)のP/Qの値は、直列接続された2つのコイルの両方に電流を流す場合(b)のP/Qの値よりも、約7%〜約30%低減していた。
【符号の説明】
【0099】
10 同期モータ
11U,11V,11W ステータコイル
12 回転磁界
13 ロータ
20 インバータ回路
21UU,21UD,21VU,21VD,21WU,21WD 半導体スイッチ
22UU,22UD,22VU,22VD,22WU,22WD フォトカプラ
23U,23V,23W 電流センサ
24 DSP
110 3相同期モータ
111U,111V,111W ステータコイル
112 回転磁界
113 ロータ
【技術分野】
【0001】
本発明は交流モータに関し、より詳細には、コイル電流の独立した制御を可能とするインバータ回路を備えた、低消費電力の交流モータ及び交流モータの制御方法に関する。
【背景技術】
【0002】
交流モータは、ロータへの電力供給用のブラシを持たず、直流モータと比較してブラシ交換等のメンテナンスが不要である点から、ロボットまたは工作機械等の産業用機械や電気自動車に広く使われている。交流モータの種類には、例えば、誘導モータ、同期モータ、および交流整流子モータがある。
【0003】
例えば3相同期モータでは、120度ずつの角度をおいて3つのステータコイルを配置し、3つのステータコイルの一方の3端子を互いに結合して、例えばY型結線回路を構成する。3つのステータコイルの他方の3端子に3相交流電流を通電することで回転磁界を発生させ、モータの中央に位置する永久磁石のロータを回転させる。3相同期モータは、電力供給線が3本で済む点や、モータの始動性の点から、交流モータとしてよく使用されている。
【0004】
一方、半導体素子が発達した現代では、デジタル技術の発達により、直流電源を入力に使うことが多い。また、動力源としてモータを電気自動車に搭載する場合にも、モータ用の電源が直流電源(バッテリー)であることが要求される。そのため、近年では、ステータコイルに3相交流電流を通電することはせず、トランジスタを利用したオン/オフ回路(即ち、インバータ回路)を用いて、擬似的な3相交流電流を発生させている。
【0005】
インバータ回路を用いて制御を行う同期モータの基本的な構造および駆動方法は周知であり、例えば下記特許文献1には、3相同期モータの簡便な駆動方法である「120度通電駆動」が記載されている。3相インバータは、ステータコイルに流れる電流の向きを制御する2つのスイッチ素子を各相毎に備え、120度通電駆動の場合、3相インバータのいずれか1相は、2つのスイッチ素子が両方ともオフに固定された無通電状態になる。
【0006】
図22に、従来技術に係る例示的な3相同期モータの概略構成図を示す。図22に示す3相同期モータ110では、3つのステータコイルの各々の一方の3端子を互いに結合してY型結線回路を構成し、3相交流電流に代えて、3つのステータコイル111U,111V,111Wの各々の他方の3端子に、1つの直流電圧2Eを印加する。上記した「120度通電駆動」を実現するために、図22に示す3相同期モータ110では、直列回路をなす2つのステータコイル(例えば、111U,111Vとする)に直流電流を通電し、この直流電流のオン/オフ時間の長さで電流を調節することで、擬似的な3相交流電流を発生させている。擬似的な3相交流電流により発生した回転磁界112は、モータ110の中央に位置するロータ113を回転させる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−151351号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来技術に係る3相同期モータでは、電力供給線の原料である高価な銅の使用量を減らすことを目的として、電力供給線が3本に制限されている。また、デジタル技術の発達により、直流電源を入力に使用するという制限が生じている。これら制限の下で、従来技術に係る3相同期モータ110が120度通電駆動を行うためには、直列回路をなす2つのステータコイル111U,111Vに、同じ強さの電流を同じ時間通電しなくてはならない。これがモータの消費電力を増大させる原因となっている。
【0009】
さらに、2つのステータコイルが120度の角度差で配置されるので、これら2つのステータコイルが作る合成磁界の大きさは常に、1つのステータコイルが形成する磁界強度の2倍以下となり、モータが出力するトルクの発生効率を減少させている。
【0010】
本発明は、上記課題を解決するためになされたものであり、その目的は、目的とする方向および強さを有する最低限の電流を通電することで消費電力を節約し、トルクの発生効率を増大させることができる、コイル電流の独立した制御を可能とするインバータ回路を備えた交流モータ及び交流モータの制御方法を提供することにある。
【課題を解決するための手段】
【0011】
上記目的の達成のために、本発明に係る交流モータ(1)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧であり、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする。
【0012】
また、本発明に係る交流モータ(2)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電し、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする。
【0013】
また、本発明に係る交流モータ(3)は、前記した交流モータ(1)または(2)において、前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする。
【0014】
また、本発明に係る交流モータ(4)は、前記した交流モータ(1)〜(3)のいずれかにおいて、前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする。
【0015】
また、本発明に係る交流モータの制御方法(5)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧である、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする。
【0016】
また、本発明に係る交流モータの制御方法(6)は、3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電する、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする。
【0017】
また、本発明に係る交流モータの制御方法(7)は、前記した交流モータ(5)または(6)において、前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする。
【0018】
また、本発明に係る交流モータの制御方法(8)は、前記した交流モータ(5)〜(7)のいずれかにおいて、前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする。
【発明の効果】
【0019】
本発明によると、交流モータの各コイルに独立して電流を流すことができるので、目的とする方向および強さを有する最低限の電流を各コイルに通電することで、モータの消費電力を低減することができる。
【0020】
また、本発明によると、交流モータの各コイルに独立して電流を流すことができるので、通電可能な最大の電流を各コイルに通電することで、得られる磁束の強さが増大し、モータが発生する最大トルクを増大させることができる。モータの出力トルクは磁束の強さに比例するので、モータの出力トルクが増大し、例えば電気自動車の発進時の加速度を上げることができる。
【0021】
また、本発明の制御方法によると、得られる回転磁界の大きさを、従来の制御方法により得られる回転磁界の大きさと同じにする場合、本発明の制御方法では、各々のステータコイルが発生する磁界が互いに打ち消す割合が少なくなるようにコイル電流を流す制御をするので、従来の制御方法と比較して、消費電力を低減することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の実施の形態に係る同期モータの概略構成図である。
【図2】本発明の実施の形態に係る同期モータを制御するインバータ回路の回路図である。
【図3】本発明の実施の形態に係る同期モータの駆動方法(a)と従来技術に係る同期モータの駆動方法(b)(c)とを示す概略図である。
【図4】同じ大きさの磁束Φcを発生させる場合の消費電力の比率を消費電力Paを基準として示すグラフである。
【図5】コイル電流の大きさをICに制限した場合に得られる最大の合成磁束ΦCを示すグラフである。
【図6】各コイルに独立して電流を流すことにより磁束を回転させる場合の、コイルを流れる電流を説明する図である。
【図7】各コイルに独立して電流を流すことにより磁束を回転させる場合の、コイルU,V,Wを流れるコイル電流iU,iV,iWのタイミング図である。
【図8】直列接続された2つのコイルに電流を流す場合の、PWM制御の2種類のデューティー比を説明するタイミング図である。
【図9】一定の大きさの磁束Φdが角速度ωで1回転する際に要する電気エネルギーの比率を、電気エネルギーWraを基準として示すグラフである。
【図10】原理的な考察により回転磁束の方向毎に得られた電気エネルギーの低減率を示す模式図である。
【図11】回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図12】回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図13】回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図14】回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図15】原理的な考察により回転磁束の方向毎に得られた磁束の強さの増大率を示す模式図である。
【図16】回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図17】回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図18】回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図19】回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【図20】1つのコイルを制御する公知の単相用インバータ回路の一例を示す図である。
【図21】インバータ回路の消費電力と同期モータの発生トルクとの比率を、インバータ回路の電源電圧の変化毎に測定した結果を示すグラフである。
【図22】従来技術に係る例示的な3相同期モータの概略構成図である。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を、添付の図面を参照して詳細に説明する。尚、以下の説明及び図面において、同じ符号は同じ又は類似の構成要素を示すこととし、よって、同じ又は類似の構成要素に関する説明を省略する。
【0024】
以下では、(1)本発明の実施の形態に係る同期モータと、同期モータを制御するインバータ回路とを概略的に説明したうえで、(2)同期モータの駆動方法、および(3)磁束の回転方法を詳細に説明する。
【0025】
(1)同期モータおよびインバータ回路の概略構成
図1に、本発明の実施の形態に係る同期モータの概略構成図を示す。図1に示すように、本発明の同期モータ10はインバータ回路を備え、インバータ回路は、2本の電力線から供給される正負の直流電圧(+E又は−E)によって擬似的な3相交流電流を発生させ(3本の電力線)、且つ、電流の戻りラインとして3つのステータコイル11U,11V,11WのY型結線結合の中心点からも電力線(GND)を引き出し、合計4本の電力線で各コイル電流を独立して制御する。インバータ回路が、3つのステータコイル11U,11V,11Wのコイル電流iU,iV,iWを独立して制御することで回転磁界12を発生させ、モータ10の中央に位置するロータ13を回転させる。回転磁界の発生方法については、後述する「(3)磁束の回転方法」にて詳細に説明する。
【0026】
図2に、図1に示す本発明の実施の形態に係る同期モータを制御するインバータ回路の回路図を示す。インバータ回路20は、6つの半導体スイッチ21UU,21UD,21VU,21VD,21WU,21WDと、6つのフォトカプラ22UU,22UD,22VU,22VD,22WU,22WDと、3つの電流センサ23U,23V,23Wとを備える。各々の半導体スイッチは、絶縁ゲートバイポーラトランジスタ(以下、IGBTと記す)と、IGBTのエミッタ−コレクタ間に接続された還流ダイオードとから構成されている。
【0027】
図2に示すように、インバータ回路20の上半分のブロックに記載した半導体スイッチ21UU,21VU,21WUの各々には、正の直流電圧(+E)が印加され、下半分のブロックに記載した半導体スイッチ21UD,21VD,21WDの各々には、負の直流電圧(−E)が印加される。6つの半導体スイッチの各々のゲートには、6つのフォトカプラが各々接続される。これら6つのフォトカプラの各々は、PWM(Pulse Width Modulation)制御用の信号をデジタル・シグナル・プロセッサ(DSP)24から受信して、6つの半導体スイッチの各々のオン/オフ時間を制御する。
【0028】
図2に示すインバータ回路20は、3つのステータコイル11U,11V,11Wのコイル電流iU,iV,iWをそれぞれ独立に制御する。一例として、図2に示す構成のうち、ステータコイル11Uのコイル電流iUを制御する構成について説明する。対を成す半導体スイッチ21UU,21UDは、ノードuにて直列に接続され、ステータコイル11Uは、一端がノードuに接続され、他端が電力供給線GNDに接続される。電流センサ23Uは、ステータコイル11Uと電力供給線GNDとの間に接続されて、DSP24へコイル電流の大きさをフィードバックする。
【0029】
対を成す2つの半導体スイッチ21UU,21UDは、いずれか一方がターンオンする。半導体スイッチ21UUがターンオンすると、ステータコイル11Uにコイル電流iUの正電流が通電し、半導体スイッチ21UDがターンオンすると、ステータコイル11Uにコイル電流iUの負電流が通電する。
【0030】
ステータコイル11Vについても同様に、対を成す半導体スイッチ21VU,21VDがノードvにて直列に接続され、ステータコイル11Vの一端がノードvに接続され、他端が電力供給線GNDに接続される。ステータコイル11Wについても同様に、対を成す半導体スイッチ21WU,21WDがノードwにて直列に接続され、ステータコイル11Wの一端がノードwに接続され、他端が電力供給線GND側に接続される。このように、本発明の実施の形態に係る同期モータ10のインバータ回路20では、3つのステータコイル11U,11V,11Wの一端が電力供給線GNDに共通に接続されることで、各コイル電流iU,iV,iWの大きさを独立して制御することができる。
【0031】
(2)同期モータおよびインバータ回路の駆動方法
次に、図3を参照して、本発明の実施の形態に係る同期モータの駆動方法と従来技術に係る同期モータの駆動方法との間で、同じ大きさの磁束を発生させる場合の各々の消費電力を比較する。
【0032】
図3は、本発明の実施の形態に係る同期モータの駆動方法と従来技術に係る同期モータの駆動方法とを示す概略図である。(a)は、本発明の実施の形態に係る同期モータの駆動方法を示す概略図であり、(b)および(c)は何れも、従来技術に係る同期モータの駆動方法を示す概略図である。これら(a)〜(c)に示す何れの駆動方法であっても、擬似的な3相交流電流を発生させる。なお、合成磁束Φの向きは、図3(b)又は後述する図6中に示すように、図中の水平線方向を基準とし、半時計回り方向を正の回転方向とする。コイルU,V,Wに流れる各々の電流は、例えばPWMにより制御される。
【0033】
ケース(a):各コイルに独立して電流を流す場合
本発明の実施の形態に係る同期モータの駆動方法では、各コイルに独立して電流を流す。例えば、図3(a)に示すように、最も簡単なケースとして、1つのコイルUだけに電流を流すケースを考える。いま、直流電圧E[V]をコイルの両端に印加すると、コイルに電流IC[A]が流れ、コイル電流ICにより磁束ΦC[Wb]が生成されるとする。
【0034】
コイルUに流れるコイル電流Iuは、Iu=ICであり、
IC=E/R (1)
となる。R[Ω]はコイルUの抵抗値である。コイル電流ICにより生成される磁束ΦC[Wb]は、
ΦC=KBIC (2)
となる。KBはコイル定数である。よって、磁束ΦCを生成するために必要な電力Pa[W]は、
Pa=EIC=EΦC/KB (3)
となる。
【0035】
ケース(b):直列接続された2つのコイルの両方に電流を流す場合
従来技術に係る120度通電駆動では、Y型結線回路を構成する3つのコイルのうち、直列接続された2つのコイルの両方に電流を流す。例えば、図3(b)に示すように、コイルU,Wの両端に直流電圧2E[V]を印加する。コイルU,Wに流れる電流Iu,Ivは、それぞれIu=Ic/√3[A]、Iw=−Ic/√3[A]となる。ここで、直列接続された2つのコイルの接続ノードに流れる方向を正とし、接続ノードから流出する方向を負としている(以下同様)。2つのコイルU,Wに流れる電流の方向を考慮すると、2つのコイルU,Wは互いにπ/3ずつ向きが違うので、コイルU,Wが生成する2つの磁束の合成磁束Φは、sin(π/3)・ΦC/√3+sin(π/3)・ΦC/√3=ΦCとなり、各コイルに独立して電流を流す場合(a)と同じ大きさの磁束を得ることができる。即ち、PWM制御により平均コイル電流をIC/√3に設定すると、π/6[rad]の方向に合成磁束ΦC[Wb]を生成する。よって、磁束ΦCを生成するために必要な電力Pb[W]は、
Pb=(2/√3)EIC (4)
となる。
【0036】
ケース(c):3つのコイルの全てに電流を流す場合
ケース(c)では、Y型結線回路を構成する3つのコイルの全てに電流を流す。例えば、図3(c)に示すように、並列に接続した2つのコイルV,Wに、さらにコイルUを直列に接続する。直列関係にあるコイルU,Wの両端には直流電圧2E[V]を印加し、且つ、直列関係にあるコイルU,Vの両端にも直流電圧2E[V]を印加する。合成磁束ΦC[Wb]を生成する場合のコイルU,V,Wの各々に流れる電流Iu,Iv,Iwは、それぞれIu=(2/3)IC[A]、Iv=−(1/3)IC[A]、Iw=−(1/3)IC[A]となる。よって、磁束ΦCを生成するために必要な電力Pc[W]は、
Pc=(4/3)EIC (5)
となる。
【0037】
図4は、同じ大きさの磁束Φcを発生させる場合の消費電力の比率を消費電力Paを基準として示すグラフである。図4に示すように、各コイルに独立して電流を流すケース(a)の消費電力Paの比率(Pa/Pa)は、直列接続された2つのコイルの両方に電流を流すケース(b)の消費電力Pbの比率(Pb/Pa)、および、3つのコイルの全てに電流を流すケース(c)の消費電力Pcの比率(Pc/Pa)のどちらよりも低い値を示す。消費電力の低減率は、約15%〜約33%(2/√3〜4/3)である。
【0038】
図5は、コイル電流の大きさをICに制限した場合に得られる最大の合成磁束ΦCを示すグラフである。図5に示すように、各コイルに独立して電流を流すケース(a)(3つのコイルに同時に電流ICを流す)の合成磁束ΦCが、直列接続された2つのコイルの両方に電流を流すケース(b)(2つのコイルに同時に電流ICが流れる)の合成磁束、および3つのコイルの全てに電流を流すケース(c)(1つのコイルに電流ICが流れ、残りの2つのコイルにはそれぞれ電流IC/2が流れる)の合成磁束のどちらよりも高い値を示す。
【0039】
(3)磁束の回転方法
(3−1)磁束を回転させる原理
次に、本発明の実施の形態に係る同期モータにおいて磁束を回転させる方法を詳細に説明する。上記した「(2)同期モータおよびインバータ回路の駆動方法」にて説明したように、本発明の実施の形態に係る同期モータの駆動方法(ケース(a))では、各コイルに独立して電流を流す。コイル電流の大きさおよび位相の制御は、例えば周知のPWM制御により行う。
【0040】
図6は、各コイルに独立して電流を流すことにより磁束を回転させる場合の、コイルを流れる電流を説明する図である。今、2本のコイル(例えば、コイルU,Wとする)に独立して電流(コイル電流iU,iW)を流すことにより、大きさΦd[Wb]の磁束を生成し、この磁束Φdを、角度θ[rad]方向に、角速度ω[rad/s]でπ/3[rad]回転させることを考える。生成される回転磁束は大きさΦdで一定であり、コイル電流iU,iWの大きさは角度θの関数である。
【0041】
コイルU,Wの各々を流れるコイル電流iU(θ)[A],iW(θ)[A]は次の通りとなる。
【0042】
iU(θ)= α(θ)(Φd/Φc)Ic
iW(θ)=−β(θ)(Φd/Φc)Ic (6)
ここで、α(θ)(Φd/Φc)およびβ(θ)(Φd/Φc)は、図6に示す磁束の回転を得るための、PWM制御のサイクル時間T[s]についてのデューティー比であり(図8参照)、
α(θ)=(2/√3)[(√3/2)cosθ−(1/2)sinθ]
=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ θ=ωt (7)
である。最初にπ/3回転させる間は、コイルVには電流を流さないので、iV(θ)=0である。
【0043】
図7は、各コイルに独立して電流を流すことにより磁束を回転させる場合(ケース(a))の、コイルU,V,Wを流れるコイル電流iU,iV,iWのタイミング図である。
【0044】
図7に示す1サイクルは2π周期である。サイクルの1番目の期間である0〜π/3の期間では、コイル電流iU,iV,iWの大きさは、上記した式(6)(7)に従って変化する。即ち、コイル電流iU(θ)は、大きさ((Φd/Φc)Icを基準とした相対値)1から0へsin(π/3−θ)に従って単調減少し、コイル電流iV(θ)は大きさ0のままで変化せず、コイル電流iW(θ)は、大きさ0から−1へ−sinθに従って単調減少する。
【0045】
次に、2番目の期間であるπ/3〜2π/3の期間では、コイル電流iU(θ)は大きさ0のままで変化せず、コイル電流iV(θ)は、大きさ0から1へsin(θ+π/3)に従って単調増加し、コイル電流iW(θ)は、大きさ−1から0へ−sinθに従って単調増加する。
【0046】
さらに、3番目の期間である2π/3〜πの期間では、コイル電流iU(θ)は、大きさ0から−1へsin(π/3−θ)に従って単調減少し、コイル電流iV(θ)は、大きさ1から0へsin(θ+π/3)に従って単調減少し、コイル電流iW(θ)は大きさ0のままで変化しない。以後、回転磁束Φdが1回転する間、コイル電流iU(θ),iV(θ),iW(θ)の大きさは、図7に示すタイミング図に従って変化する。
【0047】
(3−2)回転磁束の電気エネルギー
回転磁束の電気エネルギーを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)と、3つのコイルの全てに電流を流すケース(c)とで比較する。
【0048】
(3−2−1)コンピュータ・シミュレーションによる考察
ケース(a):各コイルに独立して電流を流す場合
磁束Φdが角速度ω=1[rad/s]でπ/3[rad]回転した場合のコンピュータ・シミュレーションによる電気エネルギーWsa[W・s]は、
Wsa=1.17EIc/ω (8)
となる。よって、磁束Φdの1回転(2π)に要する電気エネルギーWra「W・s」は、Wsaの6倍となり、
Wra=7.0EIc/ω (9)
となる。
【0049】
ケース(b):直列接続された2つのコイルの両方に電流を流す場合
コイルU,V,Wの各々を流れるコイル電流iU(θ),iV(θ),iW(θ)は次の通りとなる。
【0050】
iU(θ)= α(θ−π/6)(Φd/Φc)Ic/√3
iV(θ)= β(θ−π/6)(Φd/Φc)Ic/√3
iW(θ)=−α(θ−π/6)(Φd/Φc)Ic/√3 − β(θ−π/6)(Φd/Φc)Ic/√3 θ=π/6 →π/2 (10)
コイル電流の各々を増大させるために、2種類のデューティー比α(Φd/Φc)/√3およびβ(Φd/Φc)/√3が設定されている。図8は、直列接続された2つのコイルに電流を流す場合の、PWM制御の2種類のデューティー比を説明するタイミング図である。
【0051】
磁束Φdの1回転に要する電気エネルギーWrb[W・s]は、コンピュータ・シミュレーションによると、
Wrb=8.08EIc/ω (11)
となる。
【0052】
ケース(c):3つのコイルの全てに電流を流す場合
磁束Φdの1回転に要する電気エネルギーWrc[W・s]は、コンピュータ・シミュレーションによると、
Wrc=9.34EIc/ω (12)
となる。
【0053】
図9は、一定の大きさの磁束Φdが角速度ωで1回転する際に要する電気エネルギーの比率を、電気エネルギーWraを基準として示すグラフである。図9に示すように、各コイルに独立して電流を流すケース(a)の電気エネルギーWraの比率(Wra/Wra)は、直列接続された2つのコイルの両方に電流を流すケース(b)の電気エネルギーWrbの比率(Wrb/Wra)、および、3つのコイルの全てに電流を流すケース(c)の電気エネルギーWrcの比率(Wrc/Wra)のどちらよりも低い値を示す。電気エネルギーの低減率は、約15〜約30%である。
【0054】
(3−2−2)原理的な考察
図10は、原理的な考察(PWM制御下での電磁気学的な考察)により回転磁束の方向毎に得られた電気エネルギーの低減率を示す模式図である。図10中に文字(D)または文字(S)で示す電気エネルギーの低減率は、直列接続された2つのコイルの両方に電流を流すケース(b)の電気エネルギーを基準として、各コイルに独立して電流を流すケース(a)の電気エネルギーについて示すものである。文字(D)は、ケース(b)に対するケース(a)の電気エネルギーの低減率が30%であることを意味し、文字(S)は、ケース(a)の電気エネルギーの消費がケース(b)の電気エネルギーの消費と同じであることを意味する。
【0055】
図10に示すように、回転磁束の方向が0、π/3、2π/3、π、4π/3、および5π/3[rad]の場合には、ケース(a)の電気エネルギーの低減率は30%となり、回転磁束の方向がπ/6、π/2、5π/6、7π/6、3π/2、および11π/6[rad]の場合には、ケース(a)の電気エネルギーの消費はケース(b)の電気エネルギーの消費と同じになる。したがって、回転磁束が1回転する際の平均を見ると、電気エネルギーの低減率は約15%となる。
【0056】
原理的な考察により、回転磁束の電気エネルギーを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とで比較する。考察は、ケース(b)に対するケース(a)の電気エネルギーの低減率が30%となる場合の一例として、回転磁束の方向が0[rad]の場合と、ケース(a)の電気エネルギーの消費がケース(b)の電気エネルギーの消費と同じとなる場合の一例として、回転磁束の方向がπ/3[rad]の場合とに対して行う。
【0057】
図11は、回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0058】
コイル電流ICにより生成される磁束ΦC[Wb]は、
ΦC=KBIC (13)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWa0[W・s]は、
Wa0=ICET (14)
となる。
【0059】
図12は、回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0060】
図12の(A)に示すように、ケース(b)の駆動方法では、2通りの電流の流し方を組み合わせて、0[rad]方向に回転磁束を生成している。これは、図12の(B)に示すように、ケース(b)では、2つのコイルに同じ強さの電流を同じ時間通電しなくてはならないという制限があるためである。
【0061】
コイル電流ICにより生成される磁束ΦCは、
ΦC=KB(1/3+1/3+1/6+1/6)IC
=KBIC (15)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWb0[W・s]は、
Wb0=ICE(1/3+1/3+1/3+1/3)T
=4/3ICET (16)
となる。
【0062】
回転磁束の方向が0[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、電気エネルギーの消費を比較する。式(14)および式(16)を比較すると、式(14)に示すケース(a)の駆動方法による電気エネルギーは、式(16)に示すケース(b)の駆動方法による電気エネルギーの3/4倍である。即ち、回転磁束の方向が0[rad]である場合の、ケース(b)に対するケース(a)の電気エネルギーの低減率は、約30%である。
【0063】
図13は、回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0064】
コイル電流ICにより生成される磁束ΦCは、
ΦC=KB(1/√3×√3/2+1/√3×√3/2)IC
=KBIC (17)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWaπ/6[W・s]は、
Waπ/6=ICE(1/√3+1/√3)T
=2/√3ICET (18)
となる。
【0065】
図14は、回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0066】
コイル電流ICにより生成される磁束ΦCは、
ΦC=KB(1/√3×√3/2+1/√3×√3/2)IC
=KBIC (19)
となり、PWMサイクルの1周期Tで消費する電気エネルギーWbπ/6[W・s]は、
Wbπ/6=ICE(1/√3+1/√3)T
=2/√3ICET (20)
となる。
【0067】
回転磁束の方向がπ/6[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、電気エネルギーの消費を比較する。式(18)および式(20)を比較すると、式(18)に示すケース(a)の駆動方法による電気エネルギーは、式(20)に示すケース(b)の駆動方法による電気エネルギーと同じ大きさである。即ち、回転磁束の方向がπ/6[rad]である場合の、ケース(a)の電気エネルギーの消費は、ケース(b)の電気エネルギーの消費と同じである。
【0068】
(3−3)回転磁束の最大の強さ
原理的な考察により、回転磁束の最大の強さを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とで比較する。ここで、得られる回転磁束の強さとは、ケース(a)およびケース(b)の各々のケースにおいて、PWM制御下で通電可能な最大の電流を各コイルに流すことにより得られる所望の回転磁束の最大の強さを意味する。
【0069】
図15は、原理的な考察(PWM制御下での電磁気学的な考察)により回転磁束の方向毎に得られた磁束の強さの増大率を示す模式図である。図15中に文字(U)または文字(S)で示す磁束の強さの増大率は、直列接続された2つのコイルの両方に電流を流すケース(b)の磁束の強さを基準として、各コイルに独立して電流を流すケース(a)の磁束の強さについて示すものである。文字(U)は、ケース(b)に対するケース(a)の磁束の強さの増大率が15%であることを意味し、文字(S)は、ケース(a)の磁束の強さがケース(b)の磁束の強さと同じであることを意味する。
【0070】
図15に示すように、回転磁束の方向が0、π/3、2π/3、π、4π/3、および5π/3[rad]の場合には、ケース(a)の磁束の強さの増大率は15%となり、回転磁束の方向がπ/6、π/2、5π/6、7π/6、3π/2、および11π/6[rad]の場合には、ケース(a)の磁束の強さはケース(b)の磁束の強さと同じになる。したがって、回転磁束が1回転する際の平均を見ると、磁束の強さの増大率は約7.5%となる。
【0071】
原理的な考察により、回転磁束の強さを、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とで比較する。考察は、ケース(a)の磁束の強さがケース(b)の磁束の強さと同じとなる場合の一例として、回転磁束の方向がπ/3[rad]の場合と、ケース(b)に対するケース(a)の磁束の強さの増大率が15%となる場合の一例として、回転磁束の方向が0[rad]の場合とに対して行う。
【0072】
図16は、回転磁束の方向がπ/6[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0073】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB(1×√3/2+1×√3/2)IC
=√3KBIC (21)
となる。
【0074】
図17は、回転磁束の方向がπ/6[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0075】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB(1×√3/2+1×√3/2)IC
=√3KBIC (22)
となる。
【0076】
回転磁束の方向がπ/6[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、磁束の強さを比較する。式(21)および式(22)を比較すると、式(22)に示すケース(a)の駆動方法により得られる磁束の強さは、式(21)に示すケース(b)の駆動方法により得られる磁束の強さと同じである。即ち、回転磁束の方向がπ/6[rad]である場合の、ケース(a)の磁束の強さは、ケース(b)の磁束の強さと同じである。
【0077】
図18は、回転磁束の方向が0[rad]である場合の、直列接続された2つのコイルの両方に電流を流すケース(b)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0078】
図18の(A)に示すように、ケース(b)の駆動方法では、2通りの電流の流し方を組み合わせて、0[rad]方向に回転磁束を生成している。これは、図18の(B)に示すように、ケース(b)では、2つのコイルに同じ強さの電流を同じ時間通電しなくてはならないという制限があるためである。
【0079】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB(1/2+1/2+1/4+1/4)IC
=1.5KBIC (23)
となる。ケース(b)では、2つのコイルには同時にIC/2の大きさのコイル電流しか流せないので、1.5KBICの強さの磁束しか生成できない。
【0080】
図19は、回転磁束の方向が0[rad]である場合の、各コイルに独立して電流を流すケース(a)の駆動方法(A)と、コイル電流のタイミング(B)とを示す図である。
【0081】
通電可能な最大のコイル電流ICにより生成される最大の磁束ΦC[Wb]は、
ΦC=KB{1+(√3ー1)/2+(√3ー1)/2}IC
=√3KBIC (24)
となる。
【0082】
回転磁束の方向が0[rad]である場合に、ケース(a)の駆動方法とケース(b)の駆動方法とで、磁束の強さを比較する。式(23)および式(24)を比較すると、式(24)に示すケース(a)の駆動方法により得られる磁束の強さは、式(23)に示すケース(b)の駆動方法により得られる磁束の強さの(√3/1.5=1.15・・・)倍である。即ち、回転磁束の方向が0[rad]である場合の、ケース(b)に対するケース(a)の磁束の強さの増大率は、約15%である。
【0083】
なお、ケース(a)の駆動方法を用いる場合の、回転磁束の方向が0[rad]〜π/6[rad]の間の磁束ΦCについては、補間によって計算することが可能である。
【0084】
また、例えば、回転磁束の方向がπ/3[rad]より大きい角度を向く場合の磁束ΦCについては、PWM制御の1周期について、例えばコイルWには、T[秒]の間電流ICを通電し、コイルU,Vには、(√3−1)T[秒]の間電流ICを通電することで発生させる。
【0085】
また、例えば、回転磁束の方向が0[rad]〜π/3[rad]の間の角度を向く場合の磁束ΦCについては、PWM制御の1周期について、例えばコイルUにαT+β(√3−1)T[秒]の間電流ICを通電し、且つ、コイルWにα(√3−1)T+βT[秒]の間電流ICを通電し、且つ、コイルVに |−α(√3−1)+β(√3ー1)|T の間電流ICを通電することで発生させる。
【0086】
以上、本発明を特定の実施の形態によって説明したが、本発明は上記した実施の形態に限定されるものではない。
【0087】
上記実施の形態では、回転磁界を発生する方法を同期モータを一例として説明しているが、回転磁界を利用するモータであれば他の種類のモータであってもよい。例えば、同期モータに代えて誘導モータであってもよく、即ち交流モータであればよい。
【0088】
また、上記実施の形態では、3相の同期モータを使用しているが、相の数は3相に限られず、3相以上の多相であってもよい。例えば、上記実施の形態で説明した3相のインバータ回路をN/3(Nは3の倍数)セット用意して、N相の同期モータを構成すればよい。この場合、合計N個のステータコイルを2π/Nの間隔で等間隔で配置すればよく、各ステータコイルに流すコイル電流のタイミングも、図7のタイミング図を参照して、インバータ回路の各セット毎に、半導体スイッチのオン/オフ時間を適宜設定すればよい。
【0089】
また、上記実施の形態では、3つのステータコイルのコイル電流をそれぞれ独立に制御するインバータ回路として、図2に示すインバータ回路20を用いているが、この図2に示すインバータ回路20に代えて、例えば図20に示す、1つのコイルを制御する公知の単相用インバータ回路を3つ用いて、各ステータコイルを独立に制御してもよい。この場合、単相用インバータ回路には、直流電圧(+E)と接地電圧(GND)とが印加され、電源は1つ(+E)で済むが、半導体スイッチ(例えば、IGBT)の数は、倍の12個を必要とする。
【0090】
また、上記実施の形態では、インバータ回路20の制御にPWM方式を用いているが、インバータ回路20内の半導体スイッチのオン/オフ動作を制御することができれば、他のパルス変調方式であってもよい。
【0091】
また、上記実施の形態では、PWM制御用の信号をDSP24がインバータ回路20へ送信しているが、DSP24に代えて、デジタル信号処理が可能なマイクロ・プロセッサであってもよい。
【0092】
また、本発明の同期モータを電気自動車に搭載する場合には、電気自動車の走行状況(例えば、速度、道路の勾配)に応じて、同期モータの制御方法を適宜変更すれば良い。例えば、電気自動車が平坦な高速道路を一定の速度で走行する状況では、同期モータは高いトルクを発生する必要が無いので、後述する実施例にて示す、単位発生トルクあたりの消費電力が低いケース(a)の制御方法で同期モータを制御すれば良い。
【実施例】
【0093】
以下に、本発明の実施例を示し、本発明の特徴をより明確にする。
【0094】
図21は、インバータ回路の消費電力と同期モータの発生トルクとの比率を、インバータ回路の電源電圧の変化毎に測定した結果を示すグラフである。消費電力および発生トルクの測定は、各コイルに独立して電流を流すケース(a)と、直列接続された2つのコイルの両方に電流を流すケース(b)とに対して行った。また、測定は、インバータ回路の電源電圧の大きさ(+E[V]、−E[V])を、E=8[V]、7[V]、6[V]に変化させて行った。
【0095】
本発明のインバータ回路20を有する同期モータ10と、発生トルク測定用のDCモータとを用意し、同期モータ10の回転軸とDCモータの回転軸とを互いに接続した。インバータ回路20はDSP24によりPWM制御され、PWM制御の周波数は500[Hz]であり、DSP24の制御周期は2[kHz]であった。
【0096】
測定は次の手順で行った。まず、インバータ回路20に所定の大きさの電源電圧を印加して、同期モータ10を一定の速度で回転させたうえで、電源の出力電流isu,islを測定し、これら出力電流の測定値から、同期モータ10の消費電力Pを算出した。次に、DCモータを駆動して同期モータ10の回転を停止させ、回転が停止した際のDCモータへの入力電流iDCの測定値から、同期モータ10の最大トルクQを算出した。測定および算出結果を表1に示す。
【0097】
【表1】
【0098】
表1中の値P/Qは、消費電力と発生トルクとの比率である。各コイルに独立して電流を流す場合(a)のP/Qの値は、直列接続された2つのコイルの両方に電流を流す場合(b)のP/Qの値よりも、約7%〜約30%低減していた。
【符号の説明】
【0099】
10 同期モータ
11U,11V,11W ステータコイル
12 回転磁界
13 ロータ
20 インバータ回路
21UU,21UD,21VU,21VD,21WU,21WD 半導体スイッチ
22UU,22UD,22VU,22VD,22WU,22WD フォトカプラ
23U,23V,23W 電流センサ
24 DSP
110 3相同期モータ
111U,111V,111W ステータコイル
112 回転磁界
113 ロータ
【特許請求の範囲】
【請求項1】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧であり、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする交流モータ。
【請求項2】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電し、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする交流モータ。
【請求項3】
前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする請求項1または2に記載の交流モータ。
【請求項4】
前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする請求項1〜3のいずれかに記載の交流モータ。
【請求項5】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子
と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧である、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする交流モータの制御方法。
【請求項6】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電する、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする交流モータの制御方法。
【請求項7】
前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする請求項5または6に記載の交流モータの制御方法。
【請求項8】
前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする請求項5〜7のいずれかに記載の交流モータの制御方法。
【請求項1】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧であり、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする交流モータ。
【請求項2】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータであって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電し、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする交流モータ。
【請求項3】
前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする請求項1または2に記載の交流モータ。
【請求項4】
前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする請求項1〜3のいずれかに記載の交流モータ。
【請求項5】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
第1の直流電圧、第2の直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電するインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記インバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記インバータ回路が、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第1のノードが接続され、ゲート端子に前記制御信号が印加される第1のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第1のノードが接続され、ゲート端子に前記制御信号が印加される第2のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第2のノードが接続され、ゲート端子に前記制御信号が印加される第3のスイッチ素子と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第2のノードが接続され、ゲート端子に前記制御信号が印加される第4のスイッチ素子と、
第1の端子に前記第1の直流電圧が印加され、第2の端子に第3のノードが接続され、ゲート端子に前記制御信号が印加される第5のスイッチ素子
と、
第1の端子に前記第2の直流電圧が印加され、第2の端子に前記第3のノードが接続され、ゲート端子に前記制御信号が印加される第6のスイッチ素子とを備え、
前記第1のステータコイルの第1の端子に前記第1のノードが接続され、第2の端子に接地電圧が印加され、
前記第2のステータコイルの第1の端子に前記第2のノードが接続され、第2の端子に接地電圧が印加され、
前記第3のステータコイルの第1の端子に前記第3のノードが接続され、第2の端子に接地電圧が印加され、
前記第1の直流電圧および前記第2の直流電圧が、互いに符号が異なる同じ大きさの直流電圧である、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、前記第1のスイッチ素子および前記第2のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第3のスイッチ素子および前記第4のスイッチ素子の何れか一方をオン状態または両方をオフ状態とし、前記第5のスイッチ素子および前記第6のスイッチ素子の何れか一方をオン状態または両方をオフ状態とすることで、前記第1〜第3のステータコイルの各々に直流電流を独立して通電し、前記回転磁界を発生させることを特徴とする交流モータの制御方法。
【請求項6】
3つずつ組を成すN個のコイルを有するN(Nは3の倍数)相の交流モータの制御方法であって、
前記組の各々を成し、協働して回転磁界を発生する第1〜第3のステータコイルと、
直流電圧および接地電圧が印加されて、前記組を成す3つのステータコイルの各々に、直流電流を独立して通電する第1〜第3の単相用のインバータ回路と、
前記直流電流の通電時間を所定の周期で制御する制御信号を、前記第1〜第3の単相用のインバータ回路に送信する信号処理プロセッサと、
前記回転磁界により回転するロータとを備え、
前記第1の単相用のインバータ回路が、前記第1のステータコイルに直流電流を独立して通電し、前記第2の単相用のインバータ回路が、前記第2のステータコイルに直流電流を独立して通電し、前記第3の単相用のインバータ回路が、前記第3のステータコイルに直流電流を独立して通電する、3つずつ組を成すN個のコイルを有するN相の交流モータにおいて、
前記制御信号が、3つの前記第1〜第3の単相用のインバータ回路のうち、何れか2つに直流電流を独立して通電することで、前記回転磁界を発生させることを特徴とする交流モータの制御方法。
【請求項7】
前記N相が3相であり、
前記回転磁界がπ/3回転する間に、3つの前記ステータコイルのうち、2つの前記ステータコイルの各々に流れる第1のコイル電流i1(θ)および第2のコイル電流i2(θ)が、
i1(θ)= α(θ)(Φd/Φc)Ic
i2(θ)=−β(θ)(Φd/Φc)Ic
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
θ=ωt
の関係を満たし、残りの1つの前記ステータコイルに流れる第3のコイル電流i3(θ)が、i3(θ)=0の関係を満たし、ここで、Φdが、所望の回転磁束の大きさ、θが磁束Φdの回転角度、ωが磁束Φdの回転角速度であり、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであることを特徴とする請求項5または6に記載の交流モータの制御方法。
【請求項8】
前記制御信号が、PWM制御信号であり、
PWM制御の1サイクルTについて、3つの前記ステータコイルのうち、
前記第1のステータコイルにサイクルαT+β(√3−1)Tの間電流Icを通電し、且つ、前記第2のステータコイルにサイクル|−α(√3−1)+β(√3−1)|Tの間電流Icを通電し、且つ、前記第3のステータコイルにサイクルα(√3−1)T+βTの間電流Icを通電することで、前記第1のステータコイルのみによって形成される磁界方向を基準とする、0[rad]〜π/3[rad]の間の方向の回転磁束を生成し、
ここで、θが回転磁束の回転角度、Φcが、前記ステータコイルに電流Icを通電した場合に得られる磁束の大きさであり、係数αおよび係数βが、
α(θ)=(2/√3)sin(π/3−θ)
β(θ)=(2/√3)sinθ
の関係を満たし、KBが前記第1〜第3のステータコイルのコイル定数であり、
前記回転磁束の最大の強度が√3KBIcとなることを特徴とする請求項5〜7のいずれかに記載の交流モータの制御方法。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】

【図16】

【図17】
【図18】
【図19】
【図20】
【図21】

【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−19668(P2012−19668A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−157306(P2010−157306)
【出願日】平成22年7月9日(2010.7.9)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月9日(2010.7.9)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
[ Back to top ]