
円錐軌道断層撮影装置
【課題】 高拡大率で、被検体の高分解能高品位の3次元画像を得ることにある。
【解決手段】 X線ビームを照射するX線源3と、被検体1から透過してくるX線ビーム2を検出するX線検出器4と、X線ビーム内で、X線ビーム中心線の方向に対し90度より小さなラミノ角で交差する回転軸RAに対し、被検体1とX線ビームとを相対回転させる回転手段6と、X線検出器4で検出したX線透過像から3次元画像を作成する制御処理部12とを備え、制御処理部12は、被検体1とX線源3との間で干渉しない回転可能範囲に基づき、半回転を超え1回転を満たない角度範囲で回転され所定の回転角度毎にX線ビームの透過像をX線検出器4で撮影するスキャン制御部12aと、X線検出器4で検出された多数の透過像から被検体の3次元画像を作成する再構成部12cとを設けた構成である。
【解決手段】 X線ビームを照射するX線源3と、被検体1から透過してくるX線ビーム2を検出するX線検出器4と、X線ビーム内で、X線ビーム中心線の方向に対し90度より小さなラミノ角で交差する回転軸RAに対し、被検体1とX線ビームとを相対回転させる回転手段6と、X線検出器4で検出したX線透過像から3次元画像を作成する制御処理部12とを備え、制御処理部12は、被検体1とX線源3との間で干渉しない回転可能範囲に基づき、半回転を超え1回転を満たない角度範囲で回転され所定の回転角度毎にX線ビームの透過像をX線検出器4で撮影するスキャン制御部12aと、X線検出器4で検出された多数の透過像から被検体の3次元画像を作成する再構成部12cとを設けた構成である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検体に対する放射線の照射方向を円錐に沿って変化させる円錐軌道断層撮影装置に関する。
【背景技術】
【0002】
円錐軌道の断層撮影装置は、円形トモシンセシス(Tomosynthesis)装置、あるいは円形ラミノグラフ(Laminograph)、あるいは傾斜型CT(Computer Tomograpy)装置とも呼ばれている。
【0003】
円錐軌道の断層撮影装置は、放射線源から発生する放射線を被検体に照射し、この被検体から透過してくる放射線を2次元分解能の放射線検出器で検出し、相対的に、被検体に対する放射線照射方向を円錐に沿って1回転分回転させ、その回転中の所定角度ごとに得られる放射線検出器の出力から被検体の3次元画像を作成するものである。
【0004】
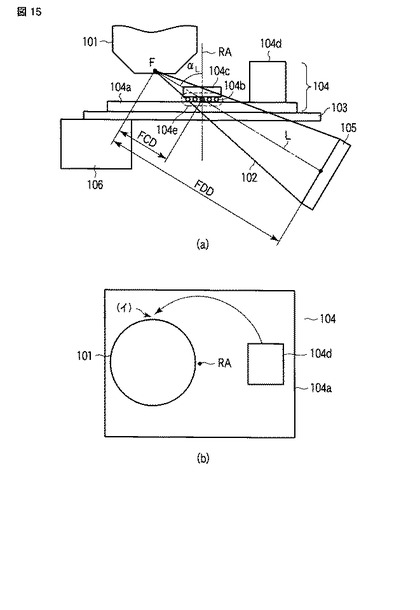
図15は従来の円錐軌道断層撮影装置の一例を示す模式図であって、同図(a)は正面図、同図(b)は平面図である(特許文献1)。
この断層撮影装置は、X線管101のX線焦点FからX線ビーム102を照射し、テーブル103に載置される被検体104から透過してくるX線ビーム102を2次元のX線検出器105で検出し、デジタル透過像(透過データ)として出力する構成である。
【0005】
被検体104は、X線管101から照射されるX線ビーム102内で、回転機構106により、X線光軸L(X線ビーム102の中央線)に対し90度より小さなラミノ角αLを成す回転軸RAに対して回転される。
【0006】
断層撮影装置は、回転機構106により被検体104を1回転させる間に所定の回転角度ごとにX線検出器105で多数の透過像を撮影し(スキャンと言う)、これら多数の透過像を再構成処理して被検体104の3次元画像(多数の断面像)を作成する。
【0007】
なお、再構成方法はフェルドカンプ等(非特許文献1)による方法などが用いられる。この再構成方法は、透過像のフィルタリングと逆投影による方法である。
【0008】
ところで、以上のような円錐軌道断層撮影装置は、板状をなす被検体104の検査に好適といえる。その理由は、ラミノ角αL=90度である通常のCT装置では、X線光軸Lが被検体104の長手方向と平行になるため、被検体104によるX線吸収が大きくなって断面像が劣化するが、ラミノ角αLを90度より小さくなるように傾ければ、回転中に常にX線光軸Lが斜め方向から被検体104に交差し、良好な断面像が得られるためである。
【0009】
従って、円錐軌道断層撮影装置は、以上のような理由から電子部品が実装された電子回路基板などの板状の被検体104の検査などに好適である。
【0010】
このような円錐軌道断層撮影装置は、X線幾何条件が自由に設定でき、色々な対象物に対応できる特徴を持っている。すなわち、X線管101(X線焦点F)に対して、テーブル103(回転軸RA)あるいはX線検出器105を近づけたり遠ざけたりすることで、撮影距離FCD(Focus to rotation Center Distance)と検出距離FDD(Focus to Detector Distance)が連続的に変更でき、被検体104の大きさなどにより撮影倍率(拡大率)=FDD/FCDが容易に変えられ、また、ミラノ角αLも可変できる。
【特許文献1】特開2003−329616号公報。
【非特許文献1】L.A.Feldkamp,L.C.Davis and J.W.Kress,Practical cone-beam algorithm,J.Opt.Soc.Am.A/Vol.1,No.6/June1984。
【発明の開示】
【発明が解決しようとする課題】
【0011】
しかしながら、近年、各種電子機器の小型化に伴い、電子機器筐体内に実装される電子回路基板が益々細密化しており、それに伴って円錐軌道断層撮影装置においても高分解能高品位の3次元画像が望まれている。このため、円錐軌道断層撮影装置としては、分解能を上げるためにX線管101のX線焦点Fを被検体104に近づけて拡大率を上げる傾向にある。
【0012】
図15は、被検体104として、電子回路部品を実装した基板(以下、実装基板という)を検査する一例を示す。この被検体(実装基板)104は、例えば基板104a上にBGA104bの接合によるICパッケージ104cのほか、電源部の一部となる比較的背の高いインダクタンス(コイル)104dなどの部品が実装されていることが多い。
【0013】
ところで、以上のような実装基板の検査に当り、BGA104b等を含む検査部位(検査領域)104eを高拡大率で検査する場合、X線管101のX線焦点Fと検査部位を近づけて撮影距離FCDを小さくするため、1回転のスキャン制御を実施する際に背の高い部品(例えばインダクタンス104d)が図15(b)の(イ)に示すようにX線管101と干渉してしまう。
【0014】
その結果、従来の円錐軌道断層撮影装置では、1回転のスキャン制御中にX線管101と被検体104との間で干渉がおこり、拡大率を上げることができないという問題がある。よって、円錐軌道断層撮影装置では、細密化された実装基板の検査要求である高分解能高品位の3次元画像を得るのが難しい問題がある。
【0015】
本発明は上記事情に鑑みてなされたもので、極力被検体の形状・大きさなどに制約されずに高拡大率で撮影し、高分解能高品位の3次元画像を作成する円錐軌道断層撮影装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記課題を解決するために、請求項1に対応する発明は、被検体に向けて放射線ビームを照射する放射線源と、前記被検体から透過してくる放射線ビームを検出する2次元の放射線検出器と、前記放射線源から照射される放射線ビーム内で、前記放射線検出器により検出される放射線ビームの中心線の方向に対し90度より小さなラミノ角で交差する回転軸に対し、前記被検体または所定の位置関係を保ったまま一体的または別体的に前記放射線源,前記放射線検出器を回転させる回転手段と、この回転手段で回転を行いつつ所定の回転角度ごとに前記放射線検出器で検出するスキャンによって検出した前記被検体の透過像を順次取込み、当該被検体の3次元画像を作成する制御処理部とを備えた円錐軌道断層撮影装置であって、
前記制御処理部は、前記被検体と放射線源との間で干渉しない回転可能範囲に基づき、前記回転手段により半回転を超え1回転に満たない角度範囲で回転を行いつつ所定の回転角度ごとに前記被検体から透過してくる放射線ビームの透過像を前記放射線検出器で検出するハーフスキャンを実施するスキャン制御手段と、このスキャン制御手段によって前記所定の回転角度ごとに前記放射線検出器で検出された多数の透過像から被検体の3次元画像を作成する再構成手段とを設けた構成である。
【0017】
この発明は、以上のような構成とすることにより、前記被検体と放射線源との間で干渉しない設定された回転可能範囲に基づいて半回転を超え1回転に満たない角度範囲で回転を行いつつスキャン制御を実施できるので、回転角度が1回転より小さくて済むことにより、被検体をより放射線源に近づけることが可能になり、放射線源の放射線焦点を被検体に近づけて拡大率で撮影でき、高分解能高品位の3次元画像を得ることができる。
【0018】
また、請求項2に対応する発明では、前記再構成手段としては、前記ハーフスキャンの間に前記放射線検出器で検出した多数の透過像を前記回転の順に並べた3次元のサイノグラムPに対し前記回転角度φと放射線経路の前記回転の面に沿った経路方位角θとの関数であるハーフスキャン用重み関数Whを乗算したサイノグラムP´を求め、この求めたサイノグラムP´に対し前記透過像の上で前記回転軸の投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めた後、このサイノグラムP"を逆投影して前記被検体の3次元画像を作成する構成である。
【0019】
このような構成とすることにより、回転角度φと回転面に沿った角度θの関数であるハーフスキャン用重み関数Whを乗算することで、実質180度分の逆投影を均質に行うことが可能となり、均質な3次元画像を得ることができる。
【0020】
さらに、請求項3に対応する発明では、前記サイノグラムPとしては、前記透過像の横と縦の画素番号n,mと前記回転の順を示す番号kとに従って並べたサイノグラムであり、
前記再構成手段は、前記n,mからθ、前記kからφをそれぞれ求めるとともに、この求めたθ,φから重み関数Whの値を求めた後、前記サイノグラムP(n,m,k)に前記θ,φから求めた重み関数Whを掛けることにより、重み関数掛けしたサイノグラムP´を得ることを特徴とする。
【0021】
このような構成とすることにより、サイノグラムP(n,m,k)の一画素(n,m,k)に対する重み関数値Wh(θ,φ)を求めることができる。
【0022】
さらに、請求項4に対応する発明では、前記再構成手段としては、前記ハーフスキャン用重み関数Whを乗算したサイノグラムP´に対し、前記透過像の上で前記回転軸の投影と直交する方向になだらかにデータを外挿してデータ長を大きくした後、前記高周波強調フィルタリングを行ってサイノグラムP"を求めることを特徴とする。
【0023】
このような構成とすることにより、フィルタリングにおいて、回転軸の投影と直交する方向に滑らかにデータを外挿してデータ長を大きくした後にフィルタリングすることにより、スキャン領域の外縁部やその外側での良好な3次元画像を再構成できる。
【0024】
また、請求項5に対応する発明では、前記制御処理部として、予め前記被検体と放射線源との間で干渉しない前記回転可能範囲を取得して設定するスキャン位置設定手段を有することを特徴とする。
【0025】
このような構成にすれば、スキャン位置設定手段により、被検体と放射線源との間で干渉しない左右回転方向の制限角度となる2つの回転角度を取得して回転可能範囲を設定し、これに基づいてハーフスキャンを実施するので、確実に干渉を防止してスキャン制御を実施できる。
【0026】
さらに、請求項6に対応する発明は、前記ハーフスキャンによる前記重み関数Whとしては、前記(θ,φ)面上で、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)と点(0,π)をそれぞれ通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である肩線b1と肩線b2とで挟まれる平坦領域R0の前記重み関数Whは1であり、
φ=0の縁線a1と前記肩線b1とで挟まれる傾斜領域R1の前記重み関数Whは、前記φの方向に縁線a1での0から前記肩線b1での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1と前記肩線b1との前記φ方向の中間線c1に対し対称の関数形であり、
φ=π+βの縁線a2と前記肩線b2とで挟まれる傾斜領域R2の前記重み関数Whは、前記φの方向に前記縁線a2での0から前記肩線b2での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2と前記肩線b2との前記φ方向の中間線c2に対し対称で前記傾斜領域R1と同じ関数形であることを特徴とする。
【0027】
さらに、請求項7に対応する発明は、前記ハーフスキャン用重み関数Whとしては、前記(θ,φ)面上において、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)を通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である元肩線b1とφ=0の元縁線a1に対し、前記元縁線a1を前記元肩線b1の側へ変位した縁線a1´と前記元肩線b1を前記縁線a1´の側へ変位した肩線b1´と、前記縁線a1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である肩線b2´と、前記肩線b1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である縁線a2´を設定し、
前記ハーフスキャン用重み関数Whとしては、前記元縁線a1と前記縁線a1´とで挟まれる領域で0、前記肩線b1´と前記肩線b2´とで挟まれる平坦領域R0´で1、前記縁線a2´とφ=π+βの元縁線a2とで挟まれる領域で0であり、
前記縁線a1´と前記肩線b1´とで挟まれる傾斜領域R1´の重み関数Whとしては、前記φの方向に前記縁線a1´での0から前記肩線b1´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1´と前記肩線b1´との前記φ方向の中間線c1´に対し対称の関数形であり、
前記縁線a2´と前記肩線b2´とで挟まれる傾斜領域R2´の前記重み関数Whとしては、前記φの方向に縁線a2´での0から前記肩線b2´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2´と前記肩線b2´との前記φ方向の中間線c2´に対し対称で前記傾斜領域R1´と同じ関数形であることを特徴とする。
【0028】
以上のような請求項6及び7に対応する発明によれば、サイノグラムP(n,m,k)に対し、回転角度φと回転面に沿った角度θの関数から求まるハーフスキャン用重み関数Wh(θ,φ)を乗算したサイノグラムP´(n,m,k)を用いて再構成するので、実質180度分の均質な逆投影がなされ、しかも逆投影の継ぎ目をなだらかに移行でき、均質で偽像を抑制した3次元画像を得ることができる。
【発明の効果】
【0029】
本発明によれば、極力被検体の形状・大きさなどに制約されずに高拡大率で撮影でき、高分解能高品位の3次元画像を作成できる。
【発明を実施するための最良の形態】
【0030】
以下、本発明の実施の形態について図面を参照して説明する。
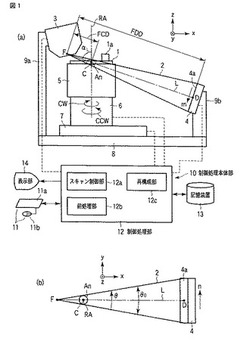
図1は本発明に係る円錐軌道断層撮影装置の一実施の形態を示す構成図であって、同図(a)は正面図、同図(b)は平面図である。なお、ここでは放射線としてX線を用いて説明する。
【0031】
円錐軌道断層撮影装置は、被検体1に向けてX線ビーム2を照射するX線源3と、被検体1から透過してくるX線ビーム2を透過像(透過データ)として検出する2次元のX線検出器4と、被検体1を支持する支持台5と、回転軸RAに対して被検体1を回転させる共に回転軸RAに沿って昇降させる回転・昇降機構(回転手段)6と、支持台5と回転軸RAとを一体でx方向に移動させる回転軸移動機構7と、これら機構6,7が設置されるベース8と、このベース8上にX線源3及び2次元X線検出器4をそれぞれ個別に支持するアーム9a,9bと、回転・昇降機構6及び回転軸移動機構7を駆動制御すると共にスキャン制御時に所定の回転角度ごとに2次元X線検出器4で検出される透過像を用いて、被検体1の3次元画像を再構成する制御処理本体部10等とで構成される。制御処理本体部10以外はX線の遮蔽箱(図示せず)に収納されている。4aは検出面である。
【0032】
回転軸RAは、X線ビーム2の中心線L(ほぼX線源3のX線焦点FとX線検出器4の中心Dとを結ぶ線であって、以下、X線光軸Lと称する)の方向に対し90度より小さなラミノ角αLで交差している。回転軸RAは、X線光軸Lとラミノ角αLで交差しているのでなく、X線光軸Lの方向とラミノ角αLで交差している。回転軸RAとX線光軸Lが交わっている必要はない。なお、ラミノ角αLは概略40度から80度の範囲で設定される。
【0033】
X線源3は、照射するX線ビーム2の発散点であるX線焦点Fが1μm程度のマイクロフォーカスX線管、制御処理本体部10からの設定制御指令に従って管電圧、管電流等を制御する制御回路及び制御回路の制御指令に応じた所望の管電圧、管電流をX線管に印加する電気回路からなる。ここで、X線ビーム2は、放射されるX線のうち実際にX線検出器4で検出されるX線を指す。
【0034】
X線検出器4としては、検出面4aに沿って多数のX線検出素子が2次元のマトリックス状(n,m)(画素番号n,m)に配列されたX線フラットパネルディテクタ(FPD)を用いている。検出面4a上におけるm方向は回転軸RAの投影と平行な方向、n方向は回転軸RAの投影と直交する方向(回転面に沿った方向)である。
【0035】
回転・昇降機構6は、制御処理本体部10からの回転・昇降制御指令に基づき、被検体1がX線ビーム2内で支持台5と共に回転軸RAの方向(z方向)に昇降されて位置決めされ、かつ、回転軸RAに対して回転される。
【0036】
回転軸移動機構7は、制御処理本体部10からの移動制御指令に従い、被検体1、支持台5、回転・昇降機構6及び回転軸RAが一体の状態で、回転軸RAと直交し、かつ、X線光軸Lに沿うx方向に平行移動される。これにより、回転軸RA上でX線光軸Lに一番近い点CとX線焦点Fとの撮影距離FCDが変更され設定される。
【0037】
支持台5は、プラスチックやカーボンなどで作られ、X線の吸収を少なくするために中空に形成されている。支持台5は、被検体1にあわせて交換でき、例えば大きな被検体1の場合には大きなものが用いられる。
【0038】
スキャン領域Anは、回転軸RAを中心とし、1回転中に測定されるX線ビーム2に包含される半径の円筒領域(正確には、円筒の上下に円錐を付けた領域)である。回転軸RAは、通常、機構誤差のためにX線光軸Lから少しずれているので、スキャン領域Anの半径は回転軸RAに近いX線ビーム2の縁で決まる。スキャン領域Anは無理なく再構成できる十分なデータが収集される領域である。
【0039】
なお、回転・昇降機構6及び回転軸移動機構7には図示されていないがエンコーダが取り付けられ、支持台5のx位置、高さ及び回転角度などを読み取って制御処理本体部10に送出する。
【0040】
制御処理本体部10は、通常のコンピュータが用いられ、ハードウェア的な構成としては、キーボード11a、マウス11bなどの入力部11と、CPU等で構成される制御処理部12と、磁気ディスクまたは光ディスクなどの記憶装置13と、表示部14が設けられ、その他にX線検出器4との間でデータのやり取りを行うインタフェース(図示せず)や回転・昇降機構7及び回転軸移動機構7との間で回転・昇降制御やx方向移動制御に関するデータのやり取りを行う中継機能の役割を果す機構制御ボード(図示せず)などが設けられている。
【0041】
制御処理部12は、機能的には、スキャン制御を実施し、X線検出器4からデジタル透過像を収集し、記憶装置13に記憶するスキャン制御部12aと、このスキャン制御部12aにより収集された透過像の前処理を行う前処理部12bと、前処理後の透過像を再構成処理して被検体1の3次元画像(多数の断面像)を作成し、表示部14に表示する再構成部12cとが設けられている。
【0042】
制御処理部12としては、入力部11からの指示のもとにX線源3に対し管電圧、管電流等の設定制御指令を送出し、所望の管電圧、管電流等に設定するとともに、X線の放射、停止指令も送出する。なお、管電圧、管電流は被検体1の大きさに合わせて変えることができる。
【0043】
すなわち、制御処理部12は、入力部11及び表示部14を用いて、操作者による操作のもとにメニュー選択、管電圧、管電流等を含む撮影条件の設定、ステータスの読取りと表示、必要な機構部分の手動操作、スキャンの実施、再構成処理、3次元画像の表示などを行う。
【0044】
なお、制御処理本体部10は、前述したように汎用のコンピュータが用いられるが、例えば構成部分1〜9と一体化したCPU内蔵の専用断層撮影装置であっても構わない。
【0045】
次に、以上のような円錐軌道断層撮影装置の一実施の形態における作用を説明する。
【0046】
この実施の形態は、制御処理本体部10からの昇降・回転制御指令に基づき、被検体1を所定高さ位置に設定した後、半回転を超え1回転に満たない角度範囲で回転を行うハーフスキャンを実施し、被検体1の高さや大きさなどに制約されずに確実に高分解能高品位の3次元画像を取得することにある。
【0047】
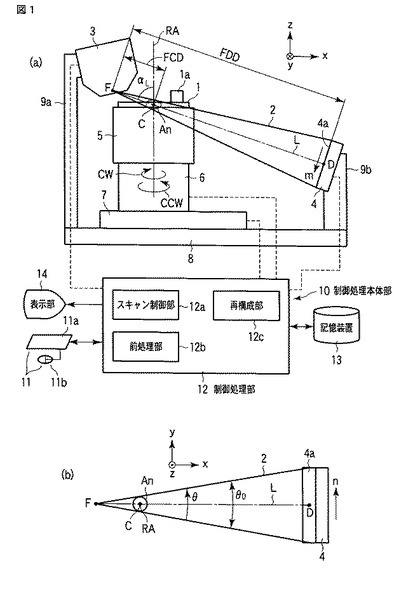
図2はスキャン位置設定制御とデータ処理全体の流れを示す図である。
ステップS1では、制御処理部12がスキャン制御部12aを実行するに先立ち、スキャンの位置決め設定を行う。
【0048】
操作者は、被検体1である実装基板の検査部位が高分解能高品位の3次元画像を得るための拡大率(=FDD/FCD)を決める。具体的には、被検体1の検査部位(検査領域部)が回転軸RA上になるように支持台5に載置した後、入力部11の操作指示のもとに制御処理部12からx方向移動制御指令を回転軸移動機構7へ送出する。回転軸移動機構7は、x方向移動制御指令に従い、回転軸RAをx方向に平行移動させ、被検体1の撮影距離FCDを設定し,所望の拡大率が得られるようにする。
【0049】
引き続き、支持台5上における被検体1の検査部位の高さ位置及び干渉限界角度を設定する。入力部11からの操作指示に従い、制御処理部12から昇降制御指令を送出し、回転・昇降機構6を介して支持台5を昇降させていく。このとき、操作者は、所望とする高さ位置と判断したとき、例えば上から目視しながら支持台5をCCW方向に手動回転させ、被検体1の突起部品1aがX線源3と干渉する直前で止め、このときの回転角度φ2(CCW制限角度)を記憶装置13に記憶させる。次に、同様に支持台5をCW方向に手動回転させ、被検体1の突起部品1aがX線源3と干渉する直前で止め、このときの回転角度φ1(CW制限角度)を記憶装置13に記憶させる。
【0050】
これにより、スキャン制御時に被検体1の突起部品1aがX線源3の干渉を受けない回転可能範囲となる2つの回転角度が決まり、スキャン位置の位置決めが設定される。
【0051】
ステップS2では、制御処理部12がスキャン制御部12aを実行する。
制御処理部12のスキャン制御部12aは、所定の回転方向の回転制御指令を回転・昇降機構6に送出する。回転・昇降機構6は回転制御指令に従って支持台5を回転させるが、このとき、X線検出器4が所定の回転角度(Δφ)ごとに被検体1の透過像を撮影し、デジタル透過像(透過データ)に変換し、制御処理部12に送出する。
【0052】
すなわち、ステップS2によるスキャン制御は、予め記憶装置13に記憶されたφ1(CW制限角度)からφ2(CCW制限角度)にかけてCCW方向の回転を行い、φ1からφ2の間に包含される所定の回転角度(Δφ)ごとに検出した多数(K枚)の透過像を順次取り込み、回転の順に記憶装置13の所定領域内に並べて3次元のサイノグラムとして記憶する。このサイノグラムとしては、透過像の横と縦の画素番号をそれぞれn,m、回転方向の透過像番号をkとし、P(n,m,k)で表わされる。但し、k=1,2,…,Kである。
【0053】
ステップS3では、制御処理部12が前処理用プログラムに従って前処理部12bを実行する。
前処理部12bによる前処理は例えばオフセット補正、感度補正(空気補正)、対数変換などである。これらオフセット補正、感度補正(空気補正)、対数変換などの前処理は画像処理で一般的に行われている手法を用いて処理する。前処理例は画素ごとに、概略、
前処理後の値P=LOG(空気画像PA/前処理前の値P) ……(1)
なる演算を実行し、前処理後の値Pを求める。ここで、空気画像PAは被検体1が無い場合の画素値であって、予めX線検出器4で検出され記憶装置13等に記憶してある値を用いる。
【0054】
次に、制御処理部12は、再構成用プログラムに従って再構成部12cを実行し、再構成処理によって被検体1の3次元画像を作成する(ステップS4)。
【0055】
図3は再構成処理の流れを詳細に説明する図である。
まず、ステップS41では、サイノグラムPに対しハーフスキャン用重み関数掛けの処理を行う。
【0056】
<ハーフスキャン用重み関数掛けの処理>
サイノグラムP(n,m,k)に乗算するハーフスキャン用重み関数Whとしては、変数n,m,kの代わりに、回転角度φとX線経路の回転面に沿った角度を表す経路方位角θ(図1参照)を変数として重み関数Wh(θ,φ)を定義する。ここで、φはkの関数φ(k)であり、θはn,mの関数θ(n,m)であるので、サイノグラムP(n,m,k)に重み関数Wh(θ,φ)を乗算する際、n,m,k値からφ,θ値を求めた後、前述したサイノグラムP(n,m,k)に当該関数φ,θから求めた重み関数Wh(θ,φ)を乗算し、ハーフスキャン用重み関数掛けしたサイノグラムP´を得る。
【0057】
具体的には、φ(k)は、最初の透過像の1つ前(k=0)を基準(φ=0)とし、被検体1のCCW回転を正方向としたとき、式、
φ=Δφ・k (k=1,2,…,K) ……(2)
から求められる。
【0058】
図4はθとn,mの関係を示す図であって、同図(a)は平面図、同図(b)は正面図である。すなわち、θ(n,m)は、図4から明らかなように、回転軸RAを通るX線経路を基準(θ=0)とし、式、
Lx=FDD・sinαL+Pg・(mc−m)・cosαL ……(3)
Ly=Pg・(n−nc) ……(4)
θ=atan(Ly/Lx) ……(5)
から求める。ここで、ncは回転軸RAの投影位置、mcはmの中央、Pgは検出面4a上の1画素サイズ(mm)である。
【0059】
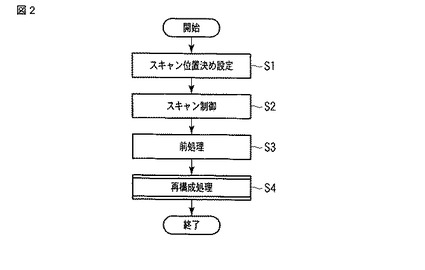
図5はハーフスキャン用重み関数Wh(θ,φ)を説明する図である。図5(a)は(θ,φ)面上のハーフスキャン用重み関数Wh(θ,φ)を表した図であり、図5(b)は同図(a)に示すAAプロファイル、図5(c)は同図(a)に示すBBプロファイル、図5(d)は同図(a)に示すCCプロファイルを示す図である。
【0060】
すなわち、図5(a)では、回転角度φは0からπ+β間(k=0ないしK+1)とし、当該0からπ+β間の重み関数Whが定義されている。βは、Whの定義域がサイノグラムを包含するよう、式、
π+β=Δφ・(K+1) ……(6)
から計算される値を用いる。
【0061】
一方、経路方位角θの範囲はθ1からθ2であって、|θ2−θ1|はファン角θ0(図1参照)である。なお、βの値としては、ファン角θ0より大きな値となることを前提としている。
【0062】
(θ,φ)面上での重み関数Whとしては、直線である肩線b1,b2を境とし、3つの領域,つまり平坦領域R0,傾斜領域R1,R2に分けて求める。
【0063】
先ず、平坦領域R0では、(θ,φ)面上で、回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、φは当該定義域の縁を基準(φ=0)とし、θは回転軸RAを通るX線経路を基準(θ=0)としたとき、点(0,β)と点(0,π)をそれぞれ通ってφのθに対する傾きdφ/dθが2の直線である肩線b1と肩線b2とで挟まれる平坦領域R0の重み関数Whは1である。
【0064】
傾斜領域R1はφ=0の縁線a1と肩線b1とで挟まれる領域であって、当該傾斜領域R1の重み関数Whは、φ方向に縁線a1での0から肩線b1での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a1と肩線b1のφ方向の中間線c1に対し対称の関数形となる。
【0065】
傾斜領域R2はφ=π+βの縁線a2と肩線b2とで挟まれる領域であって、当該傾斜領域R2の重み関数Whは、φ方向に縁線a2での0から肩線b2での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a2と肩線b2のφ方向の中間線c2に対し対称で傾斜領域R1と同じ関数形となる。
【0066】
以下、具体的に数式をもって説明する。(θ,φ)面において、重み関数Whを求めるために必要な要素は次の式、
縁線a1 : φ=0 ……(7)
中間線c1 : φ=β/2+θ ……(8)
肩線b1 : φ=β+2・θ ……(9)
肩線b2 : φ=π+2・θ ……(10)
中間線c2 : φ=π+β/2+θ ……(11)
縁線a2 : φ=π+β ……(12)
で表される。
【0067】
そこで、θ,φから重み関数Wh(θ,φ)を求める場合、一例として、まず、θを用いて、
φa1=0 ……(13)
φb1=β+2・θ ……(14)
φb2=π+2・θ ……(15)
φa2=π+β ……(16)
を計算する。
【0068】
次に、φを用いて、φ<φb1(傾斜領域R1)の場合は、
W=(φ−φa1)/(φb1−φa1) ……(17)
Wh=3・W2−2・W3 ……(18)
を計算する。また、φb1≦φ≦φb2(平坦領域R0)の場合は、
Wh=1 ……(19)
となる。また、φb2<φ(傾斜領域R2)の場合は、
W=(φ−φa2)/(φb2−φa2) ……(20)
Wh=3・W2−2・W3 ……(21)
を計算する。従って、θ、φごとに式(13)ないし式(21)を計算することにより、θ,φから重み関数Wh(θ,φ)を求めることができる。
【0069】
さて、図3に戻り、ステップS41によるハーフスキャン用重み関数掛けについて具体的に説明する。
【0070】
先ず、サイノグラムP(n,m,k)の一画素(n,m,k)に対する重み関数値Wh(θ,φ)を求める。そのためには、式(2)を用いてk値からφを求め、また、式(3)ないし式(5)を用いてn,m値からθを求める。次に、θ、φから式(13)ないし式(21)を計算し、Wh(θ,φ)を求める。なお、n,m,k値から求めたWh(θ,φ)はWh(θ(n,m),φ(k))と書くこともできる。
【0071】
次に、サイノグラムP(n,m,k)に以上のようにして求めた重み関数値Wh(θ,φ)を掛け、重み関数掛けしたサイノグラム(透過像)P´を得る。計算式としては、
P´(n,m,k)=P(n,m,k)・Wh(θ(n,m),φ(k))…(22)
と表される。
【0072】
そして、すべての画素(n,m,k)について式(22)の重み関数掛けを行い、サイノグラムPに対するハーフスキャン用重み関数掛けの処理が終了する。<>終了
次に、ステップS42では、フィルタリングを行う。重み関数掛け後の各回転角の透過像P´に対し、それぞれ回転軸RAの投影と直交する方向(n方向)に|ω|にほぼ比例する高周波強調フィルタリング(CTで言うRamachandran & Lakshminarayanan フィルタリング等)を行い、透過像P"を得る。フィルタリングは、例えばコンボリューションで行うか、あるいはフーリエ変換+フィルタ関数掛け+逆フーリエ変換等により行う。
【0073】
引き続き、ステップS43では逆投影を行う。図6は逆投影を説明する鳥瞰図である。
逆投影は、フィルタリング後の透過像P"をX線経路に沿ってそれぞれ被検体1に固定した仮設定した3次元の再構成グリッド20上に逆投影(加算)する処理である。
【0074】
図6では、再構成グリッド20をCCW回転させる代わりにX線焦点Fと検出面4aを一体としてCW回転させている。逆投影は、例えば再構成グリッド20の全ての点A2について、点A2を投影した透過像上の点A1の値を点A2の値に加算する処理である。
【0075】
なお、逆投影としては、詳しくは、加算を行う前に、逆投影の密度補正としてX線焦点Fと点A2間の距離の2乗に反比例する係数を掛けた後、加算する処理を行う。サイノグラム上の全ての透過像P"(k=1ないしK)について逆投影を終えると、3次元画像が得られる。
【0076】
次に、以上のような再構成処理を行うことにより、ハーフスキャンにおいても、均質で偽像を抑制した3次元画像を作成できる点についてさらに詳しく説明する。
【0077】
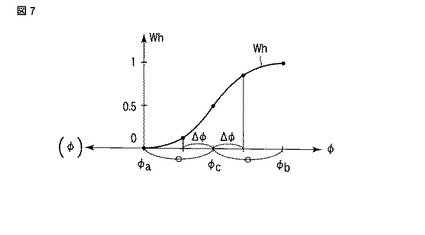
図7は2つの傾斜領域R1,R2をまとめて表したハーフスキャン用重み関数Wh(θ,φ)の傾斜領域での関数形を示す図である。重み関数Whは、φの回転方向に縁線(φ=φa)での0から肩線(φ=φb)での1に滑らかに移行し、その傾き∂Wh/∂φが縁線と肩線とのφ方向中間の中間線(φ=φc)に対し対称の関数形であって、2つの傾斜領域R1,R2で同じ関数形となる。なお、「滑らか」とはプロファイル及びその傾斜が段差なく連続的であることをいう。また、「同じ関数形」とは、φ方向の縁線−肩線間距離(|φb−φa|)が同じとき、互いに同じ形(但し、φの方向が反転した形)になることをいう。
【0078】
ここで、傾きがφcに対し対称であるということは、φcを境として左右等距離(Δφ)の両位置で両重み関数Whを加算したとき、1になることと等価である。これを式で表すと、
Wh(θ,φc+Δφ)+Wh(θ,φc−Δφ)=1 ……(23)
となる。具体的には、Wh(θ,φ)としては、例えば、前述したように式(17)、式(18)、式(20)及び式(21)を用いる。
【0079】
以下、順パス及び逆パスの関係から重み関数Whを説明する。
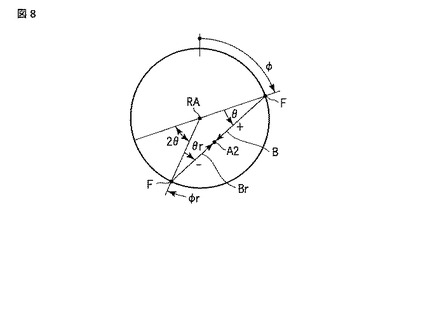
図8は回転軸方向から見た順パスB、逆パスBrを示す図である。同図は被検体1をCCW回転させる代わりにX線焦点Fと検出面4aとをCW回転させている。順方向のX線経路を順パスBとし、この順パスBに対し、回転軸方向からみて重なって逆方向のX線経路を逆パスBrとする(以下、X線経路をパスと略記する)。因みに、順パスBと逆パスBrは、同じ逆投影点A2を通るとすると、回転軸方向から見て重なっているが、直交方向から見たときには重ならず、点A2で交わっている。
【0080】
図8を参照して、回転軸方向から見て、順パスBの位置をθ,φ、逆パスBrの位置θr,φrとすると、順・逆パス相互の間には、
θr=−θ ……(24)
φr=φ+π−2・θ ……(25)
の関係があることがわかる。
【0081】
次に、以上のような実施の形態における効果について、図9及び図10を参照して説明する。
【0082】
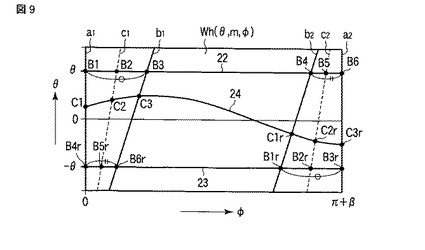
図9は重み関数Wh上の順パスB、逆パスBrを示す図である。式(24)、式(25)を用いて、順パスBと逆パスBrの関係を求めると、パスライン22上のパスB1,B2,B3,B4,B5,B6に対する逆パスはそれぞれパスライン23上のB1r,B2r,B3r,B4r,B5r,B6rとなる。
【0083】
その結果、図9の順パスB及び逆パスBrの関係(式(24)、式(25))と式(23)の関係とから、
Wh(θ,φ)+Wh(θr,φr)=1 ……(26)
の関係、すなわち順パスの重み係数と逆パスの重み係数とを加算すると、「1」となることがわかる。
【0084】
また、図9から明らかなように、式(24)及び式(25)より、縁線a1上のパスの逆パスの集合が肩線b2になり、肩線b1の逆パスが縁線a2になり、中間線c1の逆パスが中間線c2になることがわかる。
【0085】
今、図9に示す重み関数Wh上に、再構成グリッド20上の一点A2(図6)を通るパスの全体を描くと、パスライン24のような曲線となる。このパスライン24は、回転φに伴ってθが0を中心に左右に振れる曲線となる。このとき、パスライン24上のパスC1,C2,C3を、それぞれ縁線a1、中間線c1、肩線b1上の点とすると、それぞれの逆パスであるパスC1r,C2r,C3rはそれぞれパスライン24と肩線b2、中間線c2、縁線a2との交点上にある。
【0086】
次に、再構成グリッド20上の一点A2に対する逆投影について考察する。
図10は回転軸方向及び横から見た逆投影パスを示す図である。図9に示すパスライン24上のパスC1ないしC3rは、図10上では点A2を通る直線で表される。パスC1,C2,C3は点A2に対する逆投影パスであり、パスC1r,C2r,C3rはパスC1,C2,C3とはそれぞれ逆パスとなる逆投影パスである。
【0087】
今、図10で逆投影パスの方位をΨとすると、Ψはパスライン24上のθ,φを用いて、(φ−θ)で表される角度である。従って、図10には、逆投影角度Ψについての重み関数Whを円グラフで重ねて表している。順パスの重み関数と逆パスの重み関数とを加算すると1になる(式(26))ことから、パスC2とパスC3間の重み不足分25はパスC2rとパスC3r間の重み26で補われ、パスC1rとパスC2r間の重み不足分27はパスC1とパスC2間の重み28で補われ、実質的には点A2に対して180度分の逆投影が成される。点A2はスキャン領域An内ならどの点でも成り立つので、スキャン領域内の再構成グリッド20の全点について実質180度分の均質な逆投影行われていることになる。
【0088】
さらに、図10において、仮に重み係数掛けなしでパスC2からパスC2rまで180度分逆投影した場合、図10(b)に示すように境界で逆投影パスC2と逆投影パスC2rが食い違ってしまい、データの誤差が生じ、C2,C2rの方向に直線状の強い偽像(アーチファクト)ができてしまうが、本実施の形態では逆投影の継ぎ目をなだらかに移行させる重み関数Whを掛けるので、以上のような偽像を抑制することができる。
【0089】
すなわち、上記実施の形態によれば、X線源3が被検体1の一部背の高い部品に邪魔されて半回転を超え1回転に満たないスキャンを行う円錐軌道断層撮影装置であっても、サイノグラムP(n,m,k)に対し、回転角度φと回転面に沿った角度θの関数である前述したようなハーフスキャン用重み係数Wh(θ,φ)を乗算したサイノグラムP´を用いて再構成するので、実質的に180度分の均質な逆投影がなされ、かつ、逆投影の継ぎ目をなだらかに移行できることから、均質で偽像を抑制した3次元画像を生成できる。
【0090】
さらに、以上のような逆投影処理を行うことにより、半回転を超え1回転を満たないスキャンが可能になるので、1回転より少ない回転角度で済み、被検体1をよりX線源3に近づけることが可能になり、高拡大率で高分解能高品位の3次元画像を得ることができる。
【0091】
(実施の形態の変形例)
(変形例1:Whの定義域)
上記実施の形態では、重み関数Whを0ないしπ+βで定義したが、始点は任意である。任意のφ0を用いて、φ0ないしφ0+π+βで定義してもよい。
【0092】
また、上記実施の形態では、Whの定義域(φ=0ないしπ+β)を第一データ(k=1)のΔφ手前(k=0相当)から、最終データ(k=K)のΔφ後(k=K+1相当)となるように設定したが、必ずしもこのようにする必要がない。例えばWhの定義域をデータ範囲(k=1ないしK)の手前ε1から後ろのε2としたとき、ε1とε2はΔφ以下の数値、例えばΔφ/2とか、0とかを選ぶことができる。ε1とε2は互いに異なる値でもよく、負の数値でもよい。ただし、0以下を選んだ場合、使用しないデータが生じる。
【0093】
(変形例2:回転可能範囲)
上記実施の形態では、スキャン位置設定において、干渉しない回転可能範囲(φ1ないしφ2)の設定を、目視しながらCCW方向に回転させ干渉直前で止め角度φ2を決め、目視しながらCW方向に回転させ干渉直前で止め角度φ1を決めているが、回転可能範囲の決め方はこれに限らない。
【0094】
例えば、目視しながら被検体1の突起部品1aがX線源3から一番離れる回転位置φcを設定し、このφcに対称に回転可能範囲を設定してもよい。ここでは、全回転角ΔφTは最小限(180°+ファン角を少し越える角度)とし、φ1=φc−ΔφT/2、φ2=φc+ΔφT/2で回転可能範囲を設定する。
【0095】
また、例えば、目視しながらCW方向に回転させ干渉直前で止めて角度φ1を決め、全回転角ΔφTは最小限(180°+ファン角を少し越える角度)として、φ2は、φ2=φ1+ΔφTとすることで回転可能範囲を設定する。
【0096】
また、例えば、目視しながらCCW方向に回転させ干渉直前で止めて角度φ2を決め、全回転角ΔφTは最小限(180°+ファン角を少し越える角度)として、φ1は、φ1=φ2−ΔφTとすることで回転可能範囲を設定してもよい。
【0097】
さらに、例えば、X線源3と被検体1との間の静電容量変化により、X線源3と突起部品1aとの接近を検知することで自動的にφ1とφ2を設定することもできる。このとき、予めφ1とφ2を設定してからスキャンを実施してもよいが、φ2については設定せずにスキャンを開始し、φ2を検出(X線源3と突起部品1aとの接近を検知)したとき、スキャンを止めるようにしてもよい。なお、静電容量変化で接近を検知することは公知である。
【0098】
(変形例3:サイノグラムの領域)
上記実施の形態では、スキャンは回転角度φ1(CW制限角度)からφ2(CCW制限角度)まで行い、この間に透過像を可能な最大数K(φ1,φ2に応じて可変)だけ撮影しているが、Kは必ずしも可能な最大数としなくてもよい。例えばφ1,φ2に近い位置(回転加速減速区間)は撮影は行わないか、撮影データを使わないようにしてもよい。また、Kは可変でなく、予め少なめに設定した固定値としてもよい。
【0099】
また、スキャン時の透過像の撮影は、回転の等間隔Δφ毎に行うが、Δφはスキャン開始前に任意に設定できる。また、透過像の撮影は、必ずしも等間隔でなくバラつきがあってもよい。回転方向の透過像番号kと回転角度φ(k)との関係がわかれば、ハーフスキャン用重み関数掛けでき、回転角度φ(k)で逆投影することより再構成できる。
【0100】
(変形例4:スキャン範囲)
上記実施の形態では、βの値としてはファン角θ0より大きな値となることが前提としているが、ここではβはπ未満とする。その理由はβがπ以上になると、通常スキャンと同じとなり、高拡大率で撮影するときにX線源3と被検体1との干渉の問題が生じ、ハーフスキャンの意味がなくなるためである。βの範囲は、
ファン角θ0<β<π ……(27)
となり、スキャン範囲(サイノグラムの回転方向範囲)としては、概略、
π+ファン角θ0<スキャン範囲<1回転 ……(28)
となる。X線ビーム2が平行に近いときθ0≒0となるので、本実施の形態におけるハーフスキャンの回転範囲は、半回転を超え1回転を満たない角度範囲ということができる。
【0101】
(変形例5:φ,θの極性)
上記実施の形態では、回転軸RA方向上からみて被検体1をCCW方向に回転させてスキャンしており、この方向を回転角度φの+方向としている。また、回転軸RA方向上からみてCCW方向を経路方位角θの+方向としている。
【0102】
しかしながら、スキャン方向や角度の極性は任意であることは容易に理解できる。
先ず、スキャンをφの−方向に行ったとき、サイノグラムのk=Kから1に向けて透過像が撮影されるだけであり、記載した内容には何ら変化はない。
【0103】
次に、φとθの極性を変えた場合は重み関数Wh(θ,φ)を示す図5が若干変化する。それは、極性を示す矢印を逆にするだけの変化である。また、図5の肩線自体は変化しないが、傾きの数値は変化する。肩線の傾きは、
a)φCCW+,θCCW+のとき、dφ/dθ=2(上記実施の形態)…(29)
b)φCCW+,θCCW−のとき、dφ/dθ=−2 ……(30)
c)φCCW−,θCCW+のとき、dφ/dθ=−2 ……(31)
d)φCCW−,θCCW−のとき、dφ/dθ=2 ……(32)
となる。
【0104】
すなわち、b)、c)の場合は、「点(0,β)と点(0,π)それぞれを通ってφのθに対する傾きdφ/dθが−2の直線である肩線b1と肩線b2」により肩線が定義される。
また、φとθの極性を変えた場合の数式上の変化は、それぞれ−φをφに代入し、−θをθに代入することで得られる。
【0105】
(変形例6:Wh関数形)
Whの関数形は、図7に示すように、φの方向に縁線(φ=φa)での0から肩線(φ=φb)での1に滑らかに移行し、その傾き∂Wh/∂φが縁線と肩線のφ方向中間の中間線(φ=φc)に対し対称の関数形であり、2つの傾斜領域R1,R2では同じ関数形であればよく、必ずしも式(17)、式(18)、式(20)及び式(21)で表される関数でなくてもよい。例えば、図7において、φb−φaを半周期とする余弦関数、
Wh={1−cos((φ−φa)・π/(φb−φa))}/2 ……(33)
を用いてもよい。
【0106】
(変形例7:ループの任意性)
上記実施の形態の作用説明は、簡単のために、図2、図3に示すステップS3、S41、S42、S43の処理がそれぞれサイノグラム全体(全n,m,k)の処理を行うように説明しているが、図2,図3に示す処理の流れに限定されない。
【0107】
例えば、kループを外側にして、kループ内でステップS3、S41、S42、S43の処理を行うようにしてもよい。
【0108】
(変形例8:機構追加)
上記実施の形態では、幾何条件を変更するための別の機構を追加してもよい。例えば、図1に示す構成に新たに、ラミノ角αL可変機構、X線焦点Fと検出面4a中心Dとの間の検出距離FDDを相対的に変更する機構などを追加してもよい。
【0109】
また、支持台5と回転・昇降機構6との間にあって、被検体1と支持台5とを回転軸RAと直交する水平方向XYに移動させるXY機構を追加してもよい。このXY機構においては、被検体1を回転軸RAと直交する水平方向XYに移動させることができるので、被検体1を手動で載置しなおすことなく、被検体1の所望とする検査部位をスキャン領域Anに入るような位置に移動させることができる。
【0110】
(変形例9:動きの相対性)
前記実施の形態では、各構成体の動きは相対的であればよく、どちらか1つの構成体を動かしてもよい。例えば、回転軸RAに対する支持台5とX線ビーム2との回転や回転軸移動機構7による回転軸RAの移動は相対的でよい。すなわち、被検体1を回転軸RAに対して回転させる代わりにX線源3とX線検出器5とを互いの位置関係を保ったまま回転軸RAに対して一体的または別体的に回転させ、さらに回転軸RAに対してX線源3とX線検出器5とを移動させてもよい。
【0111】
(変形例10:フィルタリングの変形)(請求項6)
図3に示すフィルタリングの処理を行うに際し、回転軸RAの投影と直交するn方向になだらかにデータを外挿してデータ長を大きくした後、フィルタリングの処理を行えば、スキャン領域の外縁部やその外側であっても、良好な3次元画像を再構成できる。
【0112】
正確に言えば、重み関数Whを乗算したサイノグラムP´に対し、透過像の上で回転軸RAの投影と直交する方向の一方側になだらかにデータ値を拡張し、他方側にも同様になだらかにデータ値を拡張した後、回転軸RAの投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めればよい。
【0113】
このデータ外挿による透過像の拡張は、なだらかに繋がっていれば傾斜する直線でも、曲線であってもよい。ここで、なだらかとはプロファイルが段差なく連続的であることをいう。さらに、プロファイルの拡張部分の傾斜についても、急激な変化が無い方が好ましい。
【0114】
最も簡易なデータ外挿の一例としては、端部の値をそのまま引き伸ばす方法である。正確には、重み関数Whを乗算したサイノグラムP´に対し、透過像の上で回転軸RAの投影と直交する方向の一方側に一方端のデータ値を持つ領域を拡張し、他方側にも同様に他方端のデータ値を持つ領域を拡張した後、回転軸RAの投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めればよい。
【0115】
この変形例10によれば、拡張前の透過像n方向の縁にできる段差を、透過像をn方向になだらかに外挿してデータ長を拡張することにより、外側に追いやるか、無くすことができ、スキャン領域外縁から外にかけての画質を高めることができる。
【0116】
(変形例11:サイノグラムの変数変換1)
上記実施の形態では、サイノグラムP(n,m,k)は画像マトリックスn,mと回転番号kとで記述しているが、例えばθ(n,m)とφ(k)とを用いて座標変換し、P(θ,m,k)あるいはP(θ,m,φ)で記述してもよい。すなわち、θ,φで等間隔のサイノグラムとすることができる。この場合には、重み関数Wh(θ,φ)を変換なしに直接掛けることができる。
【0117】
引き続き、重み関数掛けしたサイノグラムP´(θ,m,k)あるいはP´(θ,m,φ)をn,m,kでの記述に戻すことなく、θ方向に|ω|フィルタリングを行い、その後に逆投影し再構成することができる。
【0118】
(変形例12:サイノグラムの変数変換2)
サイノグラムP(n,m,k)としては、回転軸RAに平行な方向をm´、当該m´と直交する方向をn´とし、P(n´,m´,k)に変換した後、再構成処理を行うこともできる。
【0119】
図11は変形例12におけるサイノグラムPの変数変換を説明する幾何図である。この変換例は、透過像をX線経路に沿って検出面4aから回転軸RAに平行な面(n´,m´)30に投影することで変換し、この変換後のサイノグラムP(n´,m´,k)を得る。
【0120】
再構成処理は、まず、重み関数Wh(θ,φ)を掛けるが、このときθはn´のみの関数θ(n´)となるので、計算は容易になる。続いて、重み関数掛けしたサイノグラムP´(n´,m´,k)をn,m,kでの記述にもどすことなく、n´方向に|ω|フィルタリングを行い、さらに逆投影することで再構成できる。
【0121】
また、この変形例12では、検出面4aを回転軸RAに平行な面(n´,m´)30に重ねるように配置することにより、直接サイノグラムP(n´,m´,k)を得るようにしてもよい。
【0122】
(変形例13:サイノグラムの変数変換3)
さらに、サイノグラムP(n,m,k)の他の変換例としては、回転軸RAに平行な方向をm´とし、P(θ,m´,k)に変換した後、再構成処理を行うこともできる。
【0123】
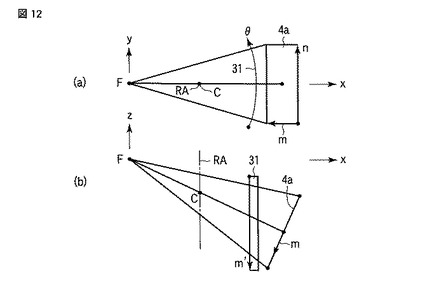
図12は変形例13におけるサイノグラムPの変数変換を説明する幾何図である。この変換例は、透過像をX線経路に沿って検出面4aから回転軸RAに沿った円周面(θ,m´)31に投影することで変換し、この変換後のサイノグラムP(θ,m´,k)を得る。
【0124】
再構成処理は、まず、重み関数Wh(θ,φ)を掛けるが、このとき重み関数Wh(θ,φ)を直接掛けることができるので、計算は容易になる。
【0125】
引き続き、重み関数掛けしたサイノグラムP´(θ,m´,k)をn,m,kでの記述にもどすことなく、θ方向に|ω|フィルタリングを行い、さらに逆投影することで再構成できる。
【0126】
また、この変形例13では、検出面4aを回転軸RAに沿った円周面31に重ねるように円周面に変形して配置することで直接サイノグラムP(θ,m´,k)を得るようにしてもよい。
【0127】
(変形例14:サイノグラムの変数変換4)
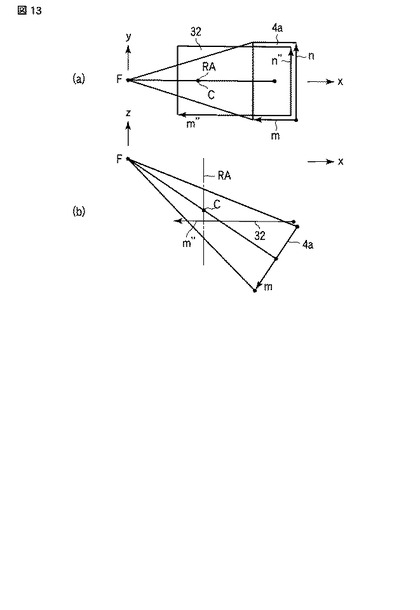
さらに、サイノグラムP(n,m,k)の他の変換例としては、回転軸RAに直交する面上で回転軸RAの投影と平行な方向をm"、このm"と直交する方向をn"とし、P(n",m",k)に変換した後、再構成処理を行うこともできる。
【0128】
図13は変形例14におけるサイノグラムPの変数変換を説明する幾何図である。この変換例は、透過像をX線経路に沿って検出面4aから回転軸RAに直交する面(n",m")32に投影することで変換し、この変換後のサイノグラムP(n",m",k)を得る。
【0129】
再構成処理は、まず、重み関数Wh(θ,φ)を掛けるが、このときθはn",m"の関数θ(n",m")となるので、計算が可能である。
【0130】
続いて、重み関数掛けしたサイノグラムP´(n",m",k)をn,m,kでの記述にもどすことなく、n"方向に|ω|フィルタリングを行い、さらに逆投影することで再構成できる。
【0131】
また、この変形例14では、検出面4aを回転軸RAに直交する面(n",m")32に重ねるように配置することで直接サイノグラムP(n",m",k)を得るようにしてもよい。
【0132】
(変形例15:Whのテーブル化)
重み関数Wh(θ,φ)は、重み関数掛け時にその都度計算する代わりに、予めθ,φの細かいステップで計算してテーブルに記憶しておいてもよい。この場合は、重み係数が欲しいθ,φとテーブルのθ,φとの食い違いが生じるので、最近傍のテーブル値を用いるか、補間値を用いるようにする。
【0133】
この方法はβが一定、すなわち使用する回転範囲K・Δφが一定の場合に有効である。
【0134】
(変形例16:縁線と肩線の変形)(請求項4,5に対応)
上記実施の形態では、重み関数Whを定義する縁線と肩線(図5参照)はサイノグラムPの全データを再構成に用いるように決められているが、縁線と肩線はこれに限らない。
【0135】
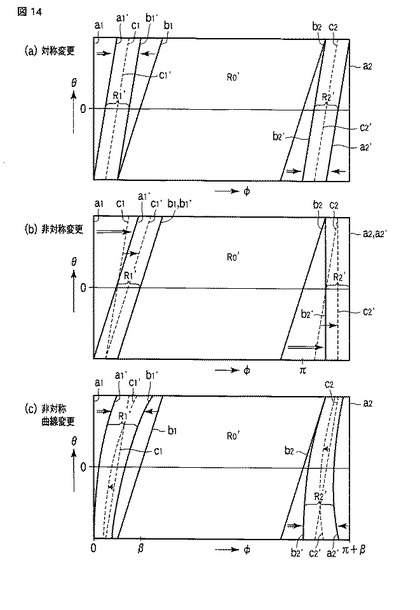
図14は縁線と肩線を変更した重み関数Whの例を示す図である。
上記実施の形態で用いた縁線a(a1,a2)、肩線b(b1,b2)、中間線(c1,c2)をそれぞれ元縁線a(a1,a2)、元肩線b(b1,b2)、元中間線c(c1,c2)とすると、この変形例における縁線a´と肩線b´は元縁線a、元肩線bとで囲まれた領域内で自由に設定できる。制限事項としては、縁線a´と肩線b´はθに対する一価関数φ(θ)で表せ、段差がなく、互いに交差せず、縁線a´が肩線b´より元縁線aの近くにあることである。
【0136】
図14(c)を用いて、縁線a´と肩線b´の設定について説明する。
元縁線a1上のパスの逆パスの集合が元肩線b2になり、元肩線b1の逆パスが元縁線a2になり、元中間線c1の逆パスが元中間線c2となる。
【0137】
ここで、元縁線a1を元肩線b1側へ変位させて縁線a1´として設定すると、その逆パスの肩線b2´はb2をa2側へ(同じ変位量をθ方向に反転させ)変位させた線として設定される。同様に、b1をa1´側へ変位させて肩線b1´として設定すると、その逆パスの縁線a2´はa2をb2´側へ(同じ変位量をθ方向に反転させ)変位させた線として設定される。なお、変位は変位量0(変位せず)も含む。
【0138】
ここで、縁線a1´と肩線b2´は互いに逆パスの関係にあるので、どちらか一方を設定すると、他方が設定される関係にあり、どちらかを先に設定しても両方が同時に設定される。同様に、肩線b1´と縁線a2´が互いに逆パスの関係にあるので、どちらを先に設定しても両方が同時に設定される。また、縁線a1´と肩線b1´のφ方向中間線c1´に対し、縁線a2´と肩線b2´のφ方向中間線c2´が互いに逆パスである。
【0139】
図14(a)は対称的な変更の一例を示す図である。元縁線a1、元肩線b1とで囲まれた領域内に元中間線c1に対し、φ方向対称に縁線a1´と肩線b1´を設定する。そして、縁線a1´の逆パスを肩線b2´とし、肩線b1´の逆パスを縁線a2´とする。φ方向の中間線c´は元中間線cと同じである。
【0140】
図14(b)は非対称的な変更の一例を示す図である。ここでは、縁線a1´と肩線b1´を元中間線c1に対し非対称に設定する例である。縁線a1´と中間線c1´と肩線b1´の逆パスがそれぞれ肩線b2´と中間線c2´と縁線a2´となる。
【0141】
図14(c)は非対称な曲線に変更する一例であって、縁線a1´と肩線b1´を曲線により自由に設定した例である。
【0142】
この変形例においては、縁線と肩線による重み関数Whは次のように定義できる。これは最も一般的な定義であって、上記実施の形態の重み関数もこれに含まれる。
【0143】
重み関数Whとしては、(θ,φ)面上で、βを所定の角度として回転角度φの方向にπ+βの幅を持った定義域で定義され、φは該定義域の縁を基準(φ=0)とし、かつ、θは回転軸RAを通るX線経路を基準(θ=0)としたとき、点(0,β)を通ってφのθに対する傾きdφ/dθが2あるいは−2の直線である元肩線b1とφ=0の元縁線a1に対し、元縁線a1を元肩線b1の側へ変位した縁線a1´と元肩線b1を縁線a1´の側へ変位した肩線b1´と、縁線a1´上の点が表すX線経路の逆向きX線経路を表す点の集合である肩線b2´と、肩線b1´上の点が表すX線経路の逆向きX線経路を表す点の集合である縁線a2´を設定する。
【0144】
その結果、Whは、元縁線a1と縁線a1´に挟まれる領域で「0」、肩線b1´と肩線b2´に挟まれた平坦領域R0´で「1」、縁線a2´とφ=π+βの元縁線a2に挟まれる領域で「0」である。
【0145】
一方、縁線a1´と肩線b1´とで挟まれる傾斜領域R1´では、Whはφの方向に縁線a1´での0から肩線b1´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a1´と肩線b1´のφ方向の中間線c1´に対し対称の関数形となる。
【0146】
縁線a2´と肩線b2´とで挟まれる傾斜領域R2´では、Whはφの方向に縁線a2´での0から肩線b2´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a2´と肩線b2´のφ方向の中間線c2´に対し対称であって、傾斜領域R1´と同じ関数形となる。
ここで、傾斜領域のWhの関数形は上記実施の形態と同様である。
【0147】
この変形例16によれば、実施の形態で述べた場合と同様に、半回転を超え1回転に満たないスキャンを行う円錐軌道断層撮影装置において、サイノグラムP(n,m,k)に対し、回転角度φと回転面に沿った角度θの関数である前述したようなハーフスキャン用重み関数Wh(θ,φ)を乗算したサイノグラムP´(n,m,k)を用いて再構成するので、実質180度分の均質な逆投影がなされ、また逆投影の継ぎ目をなだらかに移行でき、均質で偽像を抑制した3次元画像が得られる。
【0148】
また、以上のように半回転を超え1回転を満たないスキャンが可能になるので、1回転より少ない回転角で済むことにより、被検体1をよりX線源3に近づけることが可能となり、高拡大率で高分解能高品位の3次元画像を得ることができる。
【0149】
(変形例17:検出器)
上記実施の形態では、X線検出器4としてFPDを用いたが、2次元分解能を有するものであれば、他の検出器でも構わない。
【0150】
(変形例18:線源)
上記実施の形態では、放射線源としてマイクロフォーカスX線管を有するX線源3を用いたが、他のX線源でもよく、また、γ線、マイクロ波等の放射線を用いてもよい。
【0151】
(変形例19)
さらに、前述したように多数の変形例を説明したが、これら2つ以上の変形例を多重的に組み合わせた変形例も同様に含むものである。
【0152】
その他、本発明は、上記実施の形態、変形例に限定されるものでなく、その要旨を逸脱しない範囲で種々変形して実施することが可能である。
【図面の簡単な説明】
【0153】
【図1】本発明に係る円錐軌道断層撮影装置の実施の形態を示す構成図であって、同図(a)は正面図、同図(b)は平面図。
【図2】図1に示す制御処理部のスキャン位置設定制御とデータ処理全体の流れを示す図。
【図3】図2に示す再構成処理におけるフロー図。
【図4】実施の形態におけるθとn,mとの関係を示す図であって、同図(a)は平面図、同図(b)は正面図。
【図5】実施の形態におけるハーフスキャン用重み関数Wh(θ,φ)を説明する図であって、同図(a)は(θ,φ)面上のハーフスキャン用重み関数Wh(θ,φ)、同図(b)〜同図(d)は同図(a)の各経路方位角θ上のプロファイル図。
【図6】実施の形態の再構成処理における逆投影を説明する鳥瞰図。
【図7】実施の形態におけるハーフスキャン用重み関数Wh(θ,φ)の傾斜領域における関数形を説明する図。
【図8】実施の形態における回転軸方向から見た順パスB、逆パスBrを示す図。
【図9】実施の形態における重み関数Wh上の順パスB、逆パスBrを示す図。
【図10】実施の形態における回転軸方向及び横から見た逆投影パスを示す図であって、同図(a)は平面図、同図(b)は側面図。
【図11】変形例12におけるサイノグラムPの変数変換例を説明する幾何図であって、同図(a)は平面図、同図(b)は正面図。
【図12】変形例13におけるサイノグラムPの他の変数変換例を説明する幾何図であって、同図(a)は平面図、同図(b)は正面図。
【図13】変形例14におけるサイノグラムPのさらに他の変数変換例を説明する幾何図。
【図14】変形例16における縁線と肩線を変更した重み関数Whの複数例を示す図。
【図15】従来の円錐軌道断層撮影装置の一例を示す模式的な構成図であって、同図(a)は正面図、同図(b)は平面図。
【符号の説明】
【0154】
1…被検体、2…X線ビーム、3…X線源、4…X線検出器、4a…検出面、5…支持台、6…回転・昇降機構(回転手段)、7…回転軸移動機構、10…制御処理本体部、11…入力部、12…制御処理部、12a…スキャン制御部、12b…前処理部、12c…再構成部、13…記憶装置、14…表示部、20…再構成グリッド、22〜24…パスライン、25,27…重み不足分、26,28…補填用重み、F…X線焦点、RA…回転軸、L…X線光軸、αL…ラミノ角、An…スキャン領域。
【技術分野】
【0001】
本発明は、被検体に対する放射線の照射方向を円錐に沿って変化させる円錐軌道断層撮影装置に関する。
【背景技術】
【0002】
円錐軌道の断層撮影装置は、円形トモシンセシス(Tomosynthesis)装置、あるいは円形ラミノグラフ(Laminograph)、あるいは傾斜型CT(Computer Tomograpy)装置とも呼ばれている。
【0003】
円錐軌道の断層撮影装置は、放射線源から発生する放射線を被検体に照射し、この被検体から透過してくる放射線を2次元分解能の放射線検出器で検出し、相対的に、被検体に対する放射線照射方向を円錐に沿って1回転分回転させ、その回転中の所定角度ごとに得られる放射線検出器の出力から被検体の3次元画像を作成するものである。
【0004】
図15は従来の円錐軌道断層撮影装置の一例を示す模式図であって、同図(a)は正面図、同図(b)は平面図である(特許文献1)。
この断層撮影装置は、X線管101のX線焦点FからX線ビーム102を照射し、テーブル103に載置される被検体104から透過してくるX線ビーム102を2次元のX線検出器105で検出し、デジタル透過像(透過データ)として出力する構成である。
【0005】
被検体104は、X線管101から照射されるX線ビーム102内で、回転機構106により、X線光軸L(X線ビーム102の中央線)に対し90度より小さなラミノ角αLを成す回転軸RAに対して回転される。
【0006】
断層撮影装置は、回転機構106により被検体104を1回転させる間に所定の回転角度ごとにX線検出器105で多数の透過像を撮影し(スキャンと言う)、これら多数の透過像を再構成処理して被検体104の3次元画像(多数の断面像)を作成する。
【0007】
なお、再構成方法はフェルドカンプ等(非特許文献1)による方法などが用いられる。この再構成方法は、透過像のフィルタリングと逆投影による方法である。
【0008】
ところで、以上のような円錐軌道断層撮影装置は、板状をなす被検体104の検査に好適といえる。その理由は、ラミノ角αL=90度である通常のCT装置では、X線光軸Lが被検体104の長手方向と平行になるため、被検体104によるX線吸収が大きくなって断面像が劣化するが、ラミノ角αLを90度より小さくなるように傾ければ、回転中に常にX線光軸Lが斜め方向から被検体104に交差し、良好な断面像が得られるためである。
【0009】
従って、円錐軌道断層撮影装置は、以上のような理由から電子部品が実装された電子回路基板などの板状の被検体104の検査などに好適である。
【0010】
このような円錐軌道断層撮影装置は、X線幾何条件が自由に設定でき、色々な対象物に対応できる特徴を持っている。すなわち、X線管101(X線焦点F)に対して、テーブル103(回転軸RA)あるいはX線検出器105を近づけたり遠ざけたりすることで、撮影距離FCD(Focus to rotation Center Distance)と検出距離FDD(Focus to Detector Distance)が連続的に変更でき、被検体104の大きさなどにより撮影倍率(拡大率)=FDD/FCDが容易に変えられ、また、ミラノ角αLも可変できる。
【特許文献1】特開2003−329616号公報。
【非特許文献1】L.A.Feldkamp,L.C.Davis and J.W.Kress,Practical cone-beam algorithm,J.Opt.Soc.Am.A/Vol.1,No.6/June1984。
【発明の開示】
【発明が解決しようとする課題】
【0011】
しかしながら、近年、各種電子機器の小型化に伴い、電子機器筐体内に実装される電子回路基板が益々細密化しており、それに伴って円錐軌道断層撮影装置においても高分解能高品位の3次元画像が望まれている。このため、円錐軌道断層撮影装置としては、分解能を上げるためにX線管101のX線焦点Fを被検体104に近づけて拡大率を上げる傾向にある。
【0012】
図15は、被検体104として、電子回路部品を実装した基板(以下、実装基板という)を検査する一例を示す。この被検体(実装基板)104は、例えば基板104a上にBGA104bの接合によるICパッケージ104cのほか、電源部の一部となる比較的背の高いインダクタンス(コイル)104dなどの部品が実装されていることが多い。
【0013】
ところで、以上のような実装基板の検査に当り、BGA104b等を含む検査部位(検査領域)104eを高拡大率で検査する場合、X線管101のX線焦点Fと検査部位を近づけて撮影距離FCDを小さくするため、1回転のスキャン制御を実施する際に背の高い部品(例えばインダクタンス104d)が図15(b)の(イ)に示すようにX線管101と干渉してしまう。
【0014】
その結果、従来の円錐軌道断層撮影装置では、1回転のスキャン制御中にX線管101と被検体104との間で干渉がおこり、拡大率を上げることができないという問題がある。よって、円錐軌道断層撮影装置では、細密化された実装基板の検査要求である高分解能高品位の3次元画像を得るのが難しい問題がある。
【0015】
本発明は上記事情に鑑みてなされたもので、極力被検体の形状・大きさなどに制約されずに高拡大率で撮影し、高分解能高品位の3次元画像を作成する円錐軌道断層撮影装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記課題を解決するために、請求項1に対応する発明は、被検体に向けて放射線ビームを照射する放射線源と、前記被検体から透過してくる放射線ビームを検出する2次元の放射線検出器と、前記放射線源から照射される放射線ビーム内で、前記放射線検出器により検出される放射線ビームの中心線の方向に対し90度より小さなラミノ角で交差する回転軸に対し、前記被検体または所定の位置関係を保ったまま一体的または別体的に前記放射線源,前記放射線検出器を回転させる回転手段と、この回転手段で回転を行いつつ所定の回転角度ごとに前記放射線検出器で検出するスキャンによって検出した前記被検体の透過像を順次取込み、当該被検体の3次元画像を作成する制御処理部とを備えた円錐軌道断層撮影装置であって、
前記制御処理部は、前記被検体と放射線源との間で干渉しない回転可能範囲に基づき、前記回転手段により半回転を超え1回転に満たない角度範囲で回転を行いつつ所定の回転角度ごとに前記被検体から透過してくる放射線ビームの透過像を前記放射線検出器で検出するハーフスキャンを実施するスキャン制御手段と、このスキャン制御手段によって前記所定の回転角度ごとに前記放射線検出器で検出された多数の透過像から被検体の3次元画像を作成する再構成手段とを設けた構成である。
【0017】
この発明は、以上のような構成とすることにより、前記被検体と放射線源との間で干渉しない設定された回転可能範囲に基づいて半回転を超え1回転に満たない角度範囲で回転を行いつつスキャン制御を実施できるので、回転角度が1回転より小さくて済むことにより、被検体をより放射線源に近づけることが可能になり、放射線源の放射線焦点を被検体に近づけて拡大率で撮影でき、高分解能高品位の3次元画像を得ることができる。
【0018】
また、請求項2に対応する発明では、前記再構成手段としては、前記ハーフスキャンの間に前記放射線検出器で検出した多数の透過像を前記回転の順に並べた3次元のサイノグラムPに対し前記回転角度φと放射線経路の前記回転の面に沿った経路方位角θとの関数であるハーフスキャン用重み関数Whを乗算したサイノグラムP´を求め、この求めたサイノグラムP´に対し前記透過像の上で前記回転軸の投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めた後、このサイノグラムP"を逆投影して前記被検体の3次元画像を作成する構成である。
【0019】
このような構成とすることにより、回転角度φと回転面に沿った角度θの関数であるハーフスキャン用重み関数Whを乗算することで、実質180度分の逆投影を均質に行うことが可能となり、均質な3次元画像を得ることができる。
【0020】
さらに、請求項3に対応する発明では、前記サイノグラムPとしては、前記透過像の横と縦の画素番号n,mと前記回転の順を示す番号kとに従って並べたサイノグラムであり、
前記再構成手段は、前記n,mからθ、前記kからφをそれぞれ求めるとともに、この求めたθ,φから重み関数Whの値を求めた後、前記サイノグラムP(n,m,k)に前記θ,φから求めた重み関数Whを掛けることにより、重み関数掛けしたサイノグラムP´を得ることを特徴とする。
【0021】
このような構成とすることにより、サイノグラムP(n,m,k)の一画素(n,m,k)に対する重み関数値Wh(θ,φ)を求めることができる。
【0022】
さらに、請求項4に対応する発明では、前記再構成手段としては、前記ハーフスキャン用重み関数Whを乗算したサイノグラムP´に対し、前記透過像の上で前記回転軸の投影と直交する方向になだらかにデータを外挿してデータ長を大きくした後、前記高周波強調フィルタリングを行ってサイノグラムP"を求めることを特徴とする。
【0023】
このような構成とすることにより、フィルタリングにおいて、回転軸の投影と直交する方向に滑らかにデータを外挿してデータ長を大きくした後にフィルタリングすることにより、スキャン領域の外縁部やその外側での良好な3次元画像を再構成できる。
【0024】
また、請求項5に対応する発明では、前記制御処理部として、予め前記被検体と放射線源との間で干渉しない前記回転可能範囲を取得して設定するスキャン位置設定手段を有することを特徴とする。
【0025】
このような構成にすれば、スキャン位置設定手段により、被検体と放射線源との間で干渉しない左右回転方向の制限角度となる2つの回転角度を取得して回転可能範囲を設定し、これに基づいてハーフスキャンを実施するので、確実に干渉を防止してスキャン制御を実施できる。
【0026】
さらに、請求項6に対応する発明は、前記ハーフスキャンによる前記重み関数Whとしては、前記(θ,φ)面上で、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)と点(0,π)をそれぞれ通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である肩線b1と肩線b2とで挟まれる平坦領域R0の前記重み関数Whは1であり、
φ=0の縁線a1と前記肩線b1とで挟まれる傾斜領域R1の前記重み関数Whは、前記φの方向に縁線a1での0から前記肩線b1での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1と前記肩線b1との前記φ方向の中間線c1に対し対称の関数形であり、
φ=π+βの縁線a2と前記肩線b2とで挟まれる傾斜領域R2の前記重み関数Whは、前記φの方向に前記縁線a2での0から前記肩線b2での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2と前記肩線b2との前記φ方向の中間線c2に対し対称で前記傾斜領域R1と同じ関数形であることを特徴とする。
【0027】
さらに、請求項7に対応する発明は、前記ハーフスキャン用重み関数Whとしては、前記(θ,φ)面上において、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)を通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である元肩線b1とφ=0の元縁線a1に対し、前記元縁線a1を前記元肩線b1の側へ変位した縁線a1´と前記元肩線b1を前記縁線a1´の側へ変位した肩線b1´と、前記縁線a1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である肩線b2´と、前記肩線b1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である縁線a2´を設定し、
前記ハーフスキャン用重み関数Whとしては、前記元縁線a1と前記縁線a1´とで挟まれる領域で0、前記肩線b1´と前記肩線b2´とで挟まれる平坦領域R0´で1、前記縁線a2´とφ=π+βの元縁線a2とで挟まれる領域で0であり、
前記縁線a1´と前記肩線b1´とで挟まれる傾斜領域R1´の重み関数Whとしては、前記φの方向に前記縁線a1´での0から前記肩線b1´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1´と前記肩線b1´との前記φ方向の中間線c1´に対し対称の関数形であり、
前記縁線a2´と前記肩線b2´とで挟まれる傾斜領域R2´の前記重み関数Whとしては、前記φの方向に縁線a2´での0から前記肩線b2´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2´と前記肩線b2´との前記φ方向の中間線c2´に対し対称で前記傾斜領域R1´と同じ関数形であることを特徴とする。
【0028】
以上のような請求項6及び7に対応する発明によれば、サイノグラムP(n,m,k)に対し、回転角度φと回転面に沿った角度θの関数から求まるハーフスキャン用重み関数Wh(θ,φ)を乗算したサイノグラムP´(n,m,k)を用いて再構成するので、実質180度分の均質な逆投影がなされ、しかも逆投影の継ぎ目をなだらかに移行でき、均質で偽像を抑制した3次元画像を得ることができる。
【発明の効果】
【0029】
本発明によれば、極力被検体の形状・大きさなどに制約されずに高拡大率で撮影でき、高分解能高品位の3次元画像を作成できる。
【発明を実施するための最良の形態】
【0030】
以下、本発明の実施の形態について図面を参照して説明する。
図1は本発明に係る円錐軌道断層撮影装置の一実施の形態を示す構成図であって、同図(a)は正面図、同図(b)は平面図である。なお、ここでは放射線としてX線を用いて説明する。
【0031】
円錐軌道断層撮影装置は、被検体1に向けてX線ビーム2を照射するX線源3と、被検体1から透過してくるX線ビーム2を透過像(透過データ)として検出する2次元のX線検出器4と、被検体1を支持する支持台5と、回転軸RAに対して被検体1を回転させる共に回転軸RAに沿って昇降させる回転・昇降機構(回転手段)6と、支持台5と回転軸RAとを一体でx方向に移動させる回転軸移動機構7と、これら機構6,7が設置されるベース8と、このベース8上にX線源3及び2次元X線検出器4をそれぞれ個別に支持するアーム9a,9bと、回転・昇降機構6及び回転軸移動機構7を駆動制御すると共にスキャン制御時に所定の回転角度ごとに2次元X線検出器4で検出される透過像を用いて、被検体1の3次元画像を再構成する制御処理本体部10等とで構成される。制御処理本体部10以外はX線の遮蔽箱(図示せず)に収納されている。4aは検出面である。
【0032】
回転軸RAは、X線ビーム2の中心線L(ほぼX線源3のX線焦点FとX線検出器4の中心Dとを結ぶ線であって、以下、X線光軸Lと称する)の方向に対し90度より小さなラミノ角αLで交差している。回転軸RAは、X線光軸Lとラミノ角αLで交差しているのでなく、X線光軸Lの方向とラミノ角αLで交差している。回転軸RAとX線光軸Lが交わっている必要はない。なお、ラミノ角αLは概略40度から80度の範囲で設定される。
【0033】
X線源3は、照射するX線ビーム2の発散点であるX線焦点Fが1μm程度のマイクロフォーカスX線管、制御処理本体部10からの設定制御指令に従って管電圧、管電流等を制御する制御回路及び制御回路の制御指令に応じた所望の管電圧、管電流をX線管に印加する電気回路からなる。ここで、X線ビーム2は、放射されるX線のうち実際にX線検出器4で検出されるX線を指す。
【0034】
X線検出器4としては、検出面4aに沿って多数のX線検出素子が2次元のマトリックス状(n,m)(画素番号n,m)に配列されたX線フラットパネルディテクタ(FPD)を用いている。検出面4a上におけるm方向は回転軸RAの投影と平行な方向、n方向は回転軸RAの投影と直交する方向(回転面に沿った方向)である。
【0035】
回転・昇降機構6は、制御処理本体部10からの回転・昇降制御指令に基づき、被検体1がX線ビーム2内で支持台5と共に回転軸RAの方向(z方向)に昇降されて位置決めされ、かつ、回転軸RAに対して回転される。
【0036】
回転軸移動機構7は、制御処理本体部10からの移動制御指令に従い、被検体1、支持台5、回転・昇降機構6及び回転軸RAが一体の状態で、回転軸RAと直交し、かつ、X線光軸Lに沿うx方向に平行移動される。これにより、回転軸RA上でX線光軸Lに一番近い点CとX線焦点Fとの撮影距離FCDが変更され設定される。
【0037】
支持台5は、プラスチックやカーボンなどで作られ、X線の吸収を少なくするために中空に形成されている。支持台5は、被検体1にあわせて交換でき、例えば大きな被検体1の場合には大きなものが用いられる。
【0038】
スキャン領域Anは、回転軸RAを中心とし、1回転中に測定されるX線ビーム2に包含される半径の円筒領域(正確には、円筒の上下に円錐を付けた領域)である。回転軸RAは、通常、機構誤差のためにX線光軸Lから少しずれているので、スキャン領域Anの半径は回転軸RAに近いX線ビーム2の縁で決まる。スキャン領域Anは無理なく再構成できる十分なデータが収集される領域である。
【0039】
なお、回転・昇降機構6及び回転軸移動機構7には図示されていないがエンコーダが取り付けられ、支持台5のx位置、高さ及び回転角度などを読み取って制御処理本体部10に送出する。
【0040】
制御処理本体部10は、通常のコンピュータが用いられ、ハードウェア的な構成としては、キーボード11a、マウス11bなどの入力部11と、CPU等で構成される制御処理部12と、磁気ディスクまたは光ディスクなどの記憶装置13と、表示部14が設けられ、その他にX線検出器4との間でデータのやり取りを行うインタフェース(図示せず)や回転・昇降機構7及び回転軸移動機構7との間で回転・昇降制御やx方向移動制御に関するデータのやり取りを行う中継機能の役割を果す機構制御ボード(図示せず)などが設けられている。
【0041】
制御処理部12は、機能的には、スキャン制御を実施し、X線検出器4からデジタル透過像を収集し、記憶装置13に記憶するスキャン制御部12aと、このスキャン制御部12aにより収集された透過像の前処理を行う前処理部12bと、前処理後の透過像を再構成処理して被検体1の3次元画像(多数の断面像)を作成し、表示部14に表示する再構成部12cとが設けられている。
【0042】
制御処理部12としては、入力部11からの指示のもとにX線源3に対し管電圧、管電流等の設定制御指令を送出し、所望の管電圧、管電流等に設定するとともに、X線の放射、停止指令も送出する。なお、管電圧、管電流は被検体1の大きさに合わせて変えることができる。
【0043】
すなわち、制御処理部12は、入力部11及び表示部14を用いて、操作者による操作のもとにメニュー選択、管電圧、管電流等を含む撮影条件の設定、ステータスの読取りと表示、必要な機構部分の手動操作、スキャンの実施、再構成処理、3次元画像の表示などを行う。
【0044】
なお、制御処理本体部10は、前述したように汎用のコンピュータが用いられるが、例えば構成部分1〜9と一体化したCPU内蔵の専用断層撮影装置であっても構わない。
【0045】
次に、以上のような円錐軌道断層撮影装置の一実施の形態における作用を説明する。
【0046】
この実施の形態は、制御処理本体部10からの昇降・回転制御指令に基づき、被検体1を所定高さ位置に設定した後、半回転を超え1回転に満たない角度範囲で回転を行うハーフスキャンを実施し、被検体1の高さや大きさなどに制約されずに確実に高分解能高品位の3次元画像を取得することにある。
【0047】
図2はスキャン位置設定制御とデータ処理全体の流れを示す図である。
ステップS1では、制御処理部12がスキャン制御部12aを実行するに先立ち、スキャンの位置決め設定を行う。
【0048】
操作者は、被検体1である実装基板の検査部位が高分解能高品位の3次元画像を得るための拡大率(=FDD/FCD)を決める。具体的には、被検体1の検査部位(検査領域部)が回転軸RA上になるように支持台5に載置した後、入力部11の操作指示のもとに制御処理部12からx方向移動制御指令を回転軸移動機構7へ送出する。回転軸移動機構7は、x方向移動制御指令に従い、回転軸RAをx方向に平行移動させ、被検体1の撮影距離FCDを設定し,所望の拡大率が得られるようにする。
【0049】
引き続き、支持台5上における被検体1の検査部位の高さ位置及び干渉限界角度を設定する。入力部11からの操作指示に従い、制御処理部12から昇降制御指令を送出し、回転・昇降機構6を介して支持台5を昇降させていく。このとき、操作者は、所望とする高さ位置と判断したとき、例えば上から目視しながら支持台5をCCW方向に手動回転させ、被検体1の突起部品1aがX線源3と干渉する直前で止め、このときの回転角度φ2(CCW制限角度)を記憶装置13に記憶させる。次に、同様に支持台5をCW方向に手動回転させ、被検体1の突起部品1aがX線源3と干渉する直前で止め、このときの回転角度φ1(CW制限角度)を記憶装置13に記憶させる。
【0050】
これにより、スキャン制御時に被検体1の突起部品1aがX線源3の干渉を受けない回転可能範囲となる2つの回転角度が決まり、スキャン位置の位置決めが設定される。
【0051】
ステップS2では、制御処理部12がスキャン制御部12aを実行する。
制御処理部12のスキャン制御部12aは、所定の回転方向の回転制御指令を回転・昇降機構6に送出する。回転・昇降機構6は回転制御指令に従って支持台5を回転させるが、このとき、X線検出器4が所定の回転角度(Δφ)ごとに被検体1の透過像を撮影し、デジタル透過像(透過データ)に変換し、制御処理部12に送出する。
【0052】
すなわち、ステップS2によるスキャン制御は、予め記憶装置13に記憶されたφ1(CW制限角度)からφ2(CCW制限角度)にかけてCCW方向の回転を行い、φ1からφ2の間に包含される所定の回転角度(Δφ)ごとに検出した多数(K枚)の透過像を順次取り込み、回転の順に記憶装置13の所定領域内に並べて3次元のサイノグラムとして記憶する。このサイノグラムとしては、透過像の横と縦の画素番号をそれぞれn,m、回転方向の透過像番号をkとし、P(n,m,k)で表わされる。但し、k=1,2,…,Kである。
【0053】
ステップS3では、制御処理部12が前処理用プログラムに従って前処理部12bを実行する。
前処理部12bによる前処理は例えばオフセット補正、感度補正(空気補正)、対数変換などである。これらオフセット補正、感度補正(空気補正)、対数変換などの前処理は画像処理で一般的に行われている手法を用いて処理する。前処理例は画素ごとに、概略、
前処理後の値P=LOG(空気画像PA/前処理前の値P) ……(1)
なる演算を実行し、前処理後の値Pを求める。ここで、空気画像PAは被検体1が無い場合の画素値であって、予めX線検出器4で検出され記憶装置13等に記憶してある値を用いる。
【0054】
次に、制御処理部12は、再構成用プログラムに従って再構成部12cを実行し、再構成処理によって被検体1の3次元画像を作成する(ステップS4)。
【0055】
図3は再構成処理の流れを詳細に説明する図である。
まず、ステップS41では、サイノグラムPに対しハーフスキャン用重み関数掛けの処理を行う。
【0056】
<ハーフスキャン用重み関数掛けの処理>
サイノグラムP(n,m,k)に乗算するハーフスキャン用重み関数Whとしては、変数n,m,kの代わりに、回転角度φとX線経路の回転面に沿った角度を表す経路方位角θ(図1参照)を変数として重み関数Wh(θ,φ)を定義する。ここで、φはkの関数φ(k)であり、θはn,mの関数θ(n,m)であるので、サイノグラムP(n,m,k)に重み関数Wh(θ,φ)を乗算する際、n,m,k値からφ,θ値を求めた後、前述したサイノグラムP(n,m,k)に当該関数φ,θから求めた重み関数Wh(θ,φ)を乗算し、ハーフスキャン用重み関数掛けしたサイノグラムP´を得る。
【0057】
具体的には、φ(k)は、最初の透過像の1つ前(k=0)を基準(φ=0)とし、被検体1のCCW回転を正方向としたとき、式、
φ=Δφ・k (k=1,2,…,K) ……(2)
から求められる。
【0058】
図4はθとn,mの関係を示す図であって、同図(a)は平面図、同図(b)は正面図である。すなわち、θ(n,m)は、図4から明らかなように、回転軸RAを通るX線経路を基準(θ=0)とし、式、
Lx=FDD・sinαL+Pg・(mc−m)・cosαL ……(3)
Ly=Pg・(n−nc) ……(4)
θ=atan(Ly/Lx) ……(5)
から求める。ここで、ncは回転軸RAの投影位置、mcはmの中央、Pgは検出面4a上の1画素サイズ(mm)である。
【0059】
図5はハーフスキャン用重み関数Wh(θ,φ)を説明する図である。図5(a)は(θ,φ)面上のハーフスキャン用重み関数Wh(θ,φ)を表した図であり、図5(b)は同図(a)に示すAAプロファイル、図5(c)は同図(a)に示すBBプロファイル、図5(d)は同図(a)に示すCCプロファイルを示す図である。
【0060】
すなわち、図5(a)では、回転角度φは0からπ+β間(k=0ないしK+1)とし、当該0からπ+β間の重み関数Whが定義されている。βは、Whの定義域がサイノグラムを包含するよう、式、
π+β=Δφ・(K+1) ……(6)
から計算される値を用いる。
【0061】
一方、経路方位角θの範囲はθ1からθ2であって、|θ2−θ1|はファン角θ0(図1参照)である。なお、βの値としては、ファン角θ0より大きな値となることを前提としている。
【0062】
(θ,φ)面上での重み関数Whとしては、直線である肩線b1,b2を境とし、3つの領域,つまり平坦領域R0,傾斜領域R1,R2に分けて求める。
【0063】
先ず、平坦領域R0では、(θ,φ)面上で、回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、φは当該定義域の縁を基準(φ=0)とし、θは回転軸RAを通るX線経路を基準(θ=0)としたとき、点(0,β)と点(0,π)をそれぞれ通ってφのθに対する傾きdφ/dθが2の直線である肩線b1と肩線b2とで挟まれる平坦領域R0の重み関数Whは1である。
【0064】
傾斜領域R1はφ=0の縁線a1と肩線b1とで挟まれる領域であって、当該傾斜領域R1の重み関数Whは、φ方向に縁線a1での0から肩線b1での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a1と肩線b1のφ方向の中間線c1に対し対称の関数形となる。
【0065】
傾斜領域R2はφ=π+βの縁線a2と肩線b2とで挟まれる領域であって、当該傾斜領域R2の重み関数Whは、φ方向に縁線a2での0から肩線b2での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a2と肩線b2のφ方向の中間線c2に対し対称で傾斜領域R1と同じ関数形となる。
【0066】
以下、具体的に数式をもって説明する。(θ,φ)面において、重み関数Whを求めるために必要な要素は次の式、
縁線a1 : φ=0 ……(7)
中間線c1 : φ=β/2+θ ……(8)
肩線b1 : φ=β+2・θ ……(9)
肩線b2 : φ=π+2・θ ……(10)
中間線c2 : φ=π+β/2+θ ……(11)
縁線a2 : φ=π+β ……(12)
で表される。
【0067】
そこで、θ,φから重み関数Wh(θ,φ)を求める場合、一例として、まず、θを用いて、
φa1=0 ……(13)
φb1=β+2・θ ……(14)
φb2=π+2・θ ……(15)
φa2=π+β ……(16)
を計算する。
【0068】
次に、φを用いて、φ<φb1(傾斜領域R1)の場合は、
W=(φ−φa1)/(φb1−φa1) ……(17)
Wh=3・W2−2・W3 ……(18)
を計算する。また、φb1≦φ≦φb2(平坦領域R0)の場合は、
Wh=1 ……(19)
となる。また、φb2<φ(傾斜領域R2)の場合は、
W=(φ−φa2)/(φb2−φa2) ……(20)
Wh=3・W2−2・W3 ……(21)
を計算する。従って、θ、φごとに式(13)ないし式(21)を計算することにより、θ,φから重み関数Wh(θ,φ)を求めることができる。
【0069】
さて、図3に戻り、ステップS41によるハーフスキャン用重み関数掛けについて具体的に説明する。
【0070】
先ず、サイノグラムP(n,m,k)の一画素(n,m,k)に対する重み関数値Wh(θ,φ)を求める。そのためには、式(2)を用いてk値からφを求め、また、式(3)ないし式(5)を用いてn,m値からθを求める。次に、θ、φから式(13)ないし式(21)を計算し、Wh(θ,φ)を求める。なお、n,m,k値から求めたWh(θ,φ)はWh(θ(n,m),φ(k))と書くこともできる。
【0071】
次に、サイノグラムP(n,m,k)に以上のようにして求めた重み関数値Wh(θ,φ)を掛け、重み関数掛けしたサイノグラム(透過像)P´を得る。計算式としては、
P´(n,m,k)=P(n,m,k)・Wh(θ(n,m),φ(k))…(22)
と表される。
【0072】
そして、すべての画素(n,m,k)について式(22)の重み関数掛けを行い、サイノグラムPに対するハーフスキャン用重み関数掛けの処理が終了する。<>終了
次に、ステップS42では、フィルタリングを行う。重み関数掛け後の各回転角の透過像P´に対し、それぞれ回転軸RAの投影と直交する方向(n方向)に|ω|にほぼ比例する高周波強調フィルタリング(CTで言うRamachandran & Lakshminarayanan フィルタリング等)を行い、透過像P"を得る。フィルタリングは、例えばコンボリューションで行うか、あるいはフーリエ変換+フィルタ関数掛け+逆フーリエ変換等により行う。
【0073】
引き続き、ステップS43では逆投影を行う。図6は逆投影を説明する鳥瞰図である。
逆投影は、フィルタリング後の透過像P"をX線経路に沿ってそれぞれ被検体1に固定した仮設定した3次元の再構成グリッド20上に逆投影(加算)する処理である。
【0074】
図6では、再構成グリッド20をCCW回転させる代わりにX線焦点Fと検出面4aを一体としてCW回転させている。逆投影は、例えば再構成グリッド20の全ての点A2について、点A2を投影した透過像上の点A1の値を点A2の値に加算する処理である。
【0075】
なお、逆投影としては、詳しくは、加算を行う前に、逆投影の密度補正としてX線焦点Fと点A2間の距離の2乗に反比例する係数を掛けた後、加算する処理を行う。サイノグラム上の全ての透過像P"(k=1ないしK)について逆投影を終えると、3次元画像が得られる。
【0076】
次に、以上のような再構成処理を行うことにより、ハーフスキャンにおいても、均質で偽像を抑制した3次元画像を作成できる点についてさらに詳しく説明する。
【0077】
図7は2つの傾斜領域R1,R2をまとめて表したハーフスキャン用重み関数Wh(θ,φ)の傾斜領域での関数形を示す図である。重み関数Whは、φの回転方向に縁線(φ=φa)での0から肩線(φ=φb)での1に滑らかに移行し、その傾き∂Wh/∂φが縁線と肩線とのφ方向中間の中間線(φ=φc)に対し対称の関数形であって、2つの傾斜領域R1,R2で同じ関数形となる。なお、「滑らか」とはプロファイル及びその傾斜が段差なく連続的であることをいう。また、「同じ関数形」とは、φ方向の縁線−肩線間距離(|φb−φa|)が同じとき、互いに同じ形(但し、φの方向が反転した形)になることをいう。
【0078】
ここで、傾きがφcに対し対称であるということは、φcを境として左右等距離(Δφ)の両位置で両重み関数Whを加算したとき、1になることと等価である。これを式で表すと、
Wh(θ,φc+Δφ)+Wh(θ,φc−Δφ)=1 ……(23)
となる。具体的には、Wh(θ,φ)としては、例えば、前述したように式(17)、式(18)、式(20)及び式(21)を用いる。
【0079】
以下、順パス及び逆パスの関係から重み関数Whを説明する。
図8は回転軸方向から見た順パスB、逆パスBrを示す図である。同図は被検体1をCCW回転させる代わりにX線焦点Fと検出面4aとをCW回転させている。順方向のX線経路を順パスBとし、この順パスBに対し、回転軸方向からみて重なって逆方向のX線経路を逆パスBrとする(以下、X線経路をパスと略記する)。因みに、順パスBと逆パスBrは、同じ逆投影点A2を通るとすると、回転軸方向から見て重なっているが、直交方向から見たときには重ならず、点A2で交わっている。
【0080】
図8を参照して、回転軸方向から見て、順パスBの位置をθ,φ、逆パスBrの位置θr,φrとすると、順・逆パス相互の間には、
θr=−θ ……(24)
φr=φ+π−2・θ ……(25)
の関係があることがわかる。
【0081】
次に、以上のような実施の形態における効果について、図9及び図10を参照して説明する。
【0082】
図9は重み関数Wh上の順パスB、逆パスBrを示す図である。式(24)、式(25)を用いて、順パスBと逆パスBrの関係を求めると、パスライン22上のパスB1,B2,B3,B4,B5,B6に対する逆パスはそれぞれパスライン23上のB1r,B2r,B3r,B4r,B5r,B6rとなる。
【0083】
その結果、図9の順パスB及び逆パスBrの関係(式(24)、式(25))と式(23)の関係とから、
Wh(θ,φ)+Wh(θr,φr)=1 ……(26)
の関係、すなわち順パスの重み係数と逆パスの重み係数とを加算すると、「1」となることがわかる。
【0084】
また、図9から明らかなように、式(24)及び式(25)より、縁線a1上のパスの逆パスの集合が肩線b2になり、肩線b1の逆パスが縁線a2になり、中間線c1の逆パスが中間線c2になることがわかる。
【0085】
今、図9に示す重み関数Wh上に、再構成グリッド20上の一点A2(図6)を通るパスの全体を描くと、パスライン24のような曲線となる。このパスライン24は、回転φに伴ってθが0を中心に左右に振れる曲線となる。このとき、パスライン24上のパスC1,C2,C3を、それぞれ縁線a1、中間線c1、肩線b1上の点とすると、それぞれの逆パスであるパスC1r,C2r,C3rはそれぞれパスライン24と肩線b2、中間線c2、縁線a2との交点上にある。
【0086】
次に、再構成グリッド20上の一点A2に対する逆投影について考察する。
図10は回転軸方向及び横から見た逆投影パスを示す図である。図9に示すパスライン24上のパスC1ないしC3rは、図10上では点A2を通る直線で表される。パスC1,C2,C3は点A2に対する逆投影パスであり、パスC1r,C2r,C3rはパスC1,C2,C3とはそれぞれ逆パスとなる逆投影パスである。
【0087】
今、図10で逆投影パスの方位をΨとすると、Ψはパスライン24上のθ,φを用いて、(φ−θ)で表される角度である。従って、図10には、逆投影角度Ψについての重み関数Whを円グラフで重ねて表している。順パスの重み関数と逆パスの重み関数とを加算すると1になる(式(26))ことから、パスC2とパスC3間の重み不足分25はパスC2rとパスC3r間の重み26で補われ、パスC1rとパスC2r間の重み不足分27はパスC1とパスC2間の重み28で補われ、実質的には点A2に対して180度分の逆投影が成される。点A2はスキャン領域An内ならどの点でも成り立つので、スキャン領域内の再構成グリッド20の全点について実質180度分の均質な逆投影行われていることになる。
【0088】
さらに、図10において、仮に重み係数掛けなしでパスC2からパスC2rまで180度分逆投影した場合、図10(b)に示すように境界で逆投影パスC2と逆投影パスC2rが食い違ってしまい、データの誤差が生じ、C2,C2rの方向に直線状の強い偽像(アーチファクト)ができてしまうが、本実施の形態では逆投影の継ぎ目をなだらかに移行させる重み関数Whを掛けるので、以上のような偽像を抑制することができる。
【0089】
すなわち、上記実施の形態によれば、X線源3が被検体1の一部背の高い部品に邪魔されて半回転を超え1回転に満たないスキャンを行う円錐軌道断層撮影装置であっても、サイノグラムP(n,m,k)に対し、回転角度φと回転面に沿った角度θの関数である前述したようなハーフスキャン用重み係数Wh(θ,φ)を乗算したサイノグラムP´を用いて再構成するので、実質的に180度分の均質な逆投影がなされ、かつ、逆投影の継ぎ目をなだらかに移行できることから、均質で偽像を抑制した3次元画像を生成できる。
【0090】
さらに、以上のような逆投影処理を行うことにより、半回転を超え1回転を満たないスキャンが可能になるので、1回転より少ない回転角度で済み、被検体1をよりX線源3に近づけることが可能になり、高拡大率で高分解能高品位の3次元画像を得ることができる。
【0091】
(実施の形態の変形例)
(変形例1:Whの定義域)
上記実施の形態では、重み関数Whを0ないしπ+βで定義したが、始点は任意である。任意のφ0を用いて、φ0ないしφ0+π+βで定義してもよい。
【0092】
また、上記実施の形態では、Whの定義域(φ=0ないしπ+β)を第一データ(k=1)のΔφ手前(k=0相当)から、最終データ(k=K)のΔφ後(k=K+1相当)となるように設定したが、必ずしもこのようにする必要がない。例えばWhの定義域をデータ範囲(k=1ないしK)の手前ε1から後ろのε2としたとき、ε1とε2はΔφ以下の数値、例えばΔφ/2とか、0とかを選ぶことができる。ε1とε2は互いに異なる値でもよく、負の数値でもよい。ただし、0以下を選んだ場合、使用しないデータが生じる。
【0093】
(変形例2:回転可能範囲)
上記実施の形態では、スキャン位置設定において、干渉しない回転可能範囲(φ1ないしφ2)の設定を、目視しながらCCW方向に回転させ干渉直前で止め角度φ2を決め、目視しながらCW方向に回転させ干渉直前で止め角度φ1を決めているが、回転可能範囲の決め方はこれに限らない。
【0094】
例えば、目視しながら被検体1の突起部品1aがX線源3から一番離れる回転位置φcを設定し、このφcに対称に回転可能範囲を設定してもよい。ここでは、全回転角ΔφTは最小限(180°+ファン角を少し越える角度)とし、φ1=φc−ΔφT/2、φ2=φc+ΔφT/2で回転可能範囲を設定する。
【0095】
また、例えば、目視しながらCW方向に回転させ干渉直前で止めて角度φ1を決め、全回転角ΔφTは最小限(180°+ファン角を少し越える角度)として、φ2は、φ2=φ1+ΔφTとすることで回転可能範囲を設定する。
【0096】
また、例えば、目視しながらCCW方向に回転させ干渉直前で止めて角度φ2を決め、全回転角ΔφTは最小限(180°+ファン角を少し越える角度)として、φ1は、φ1=φ2−ΔφTとすることで回転可能範囲を設定してもよい。
【0097】
さらに、例えば、X線源3と被検体1との間の静電容量変化により、X線源3と突起部品1aとの接近を検知することで自動的にφ1とφ2を設定することもできる。このとき、予めφ1とφ2を設定してからスキャンを実施してもよいが、φ2については設定せずにスキャンを開始し、φ2を検出(X線源3と突起部品1aとの接近を検知)したとき、スキャンを止めるようにしてもよい。なお、静電容量変化で接近を検知することは公知である。
【0098】
(変形例3:サイノグラムの領域)
上記実施の形態では、スキャンは回転角度φ1(CW制限角度)からφ2(CCW制限角度)まで行い、この間に透過像を可能な最大数K(φ1,φ2に応じて可変)だけ撮影しているが、Kは必ずしも可能な最大数としなくてもよい。例えばφ1,φ2に近い位置(回転加速減速区間)は撮影は行わないか、撮影データを使わないようにしてもよい。また、Kは可変でなく、予め少なめに設定した固定値としてもよい。
【0099】
また、スキャン時の透過像の撮影は、回転の等間隔Δφ毎に行うが、Δφはスキャン開始前に任意に設定できる。また、透過像の撮影は、必ずしも等間隔でなくバラつきがあってもよい。回転方向の透過像番号kと回転角度φ(k)との関係がわかれば、ハーフスキャン用重み関数掛けでき、回転角度φ(k)で逆投影することより再構成できる。
【0100】
(変形例4:スキャン範囲)
上記実施の形態では、βの値としてはファン角θ0より大きな値となることが前提としているが、ここではβはπ未満とする。その理由はβがπ以上になると、通常スキャンと同じとなり、高拡大率で撮影するときにX線源3と被検体1との干渉の問題が生じ、ハーフスキャンの意味がなくなるためである。βの範囲は、
ファン角θ0<β<π ……(27)
となり、スキャン範囲(サイノグラムの回転方向範囲)としては、概略、
π+ファン角θ0<スキャン範囲<1回転 ……(28)
となる。X線ビーム2が平行に近いときθ0≒0となるので、本実施の形態におけるハーフスキャンの回転範囲は、半回転を超え1回転を満たない角度範囲ということができる。
【0101】
(変形例5:φ,θの極性)
上記実施の形態では、回転軸RA方向上からみて被検体1をCCW方向に回転させてスキャンしており、この方向を回転角度φの+方向としている。また、回転軸RA方向上からみてCCW方向を経路方位角θの+方向としている。
【0102】
しかしながら、スキャン方向や角度の極性は任意であることは容易に理解できる。
先ず、スキャンをφの−方向に行ったとき、サイノグラムのk=Kから1に向けて透過像が撮影されるだけであり、記載した内容には何ら変化はない。
【0103】
次に、φとθの極性を変えた場合は重み関数Wh(θ,φ)を示す図5が若干変化する。それは、極性を示す矢印を逆にするだけの変化である。また、図5の肩線自体は変化しないが、傾きの数値は変化する。肩線の傾きは、
a)φCCW+,θCCW+のとき、dφ/dθ=2(上記実施の形態)…(29)
b)φCCW+,θCCW−のとき、dφ/dθ=−2 ……(30)
c)φCCW−,θCCW+のとき、dφ/dθ=−2 ……(31)
d)φCCW−,θCCW−のとき、dφ/dθ=2 ……(32)
となる。
【0104】
すなわち、b)、c)の場合は、「点(0,β)と点(0,π)それぞれを通ってφのθに対する傾きdφ/dθが−2の直線である肩線b1と肩線b2」により肩線が定義される。
また、φとθの極性を変えた場合の数式上の変化は、それぞれ−φをφに代入し、−θをθに代入することで得られる。
【0105】
(変形例6:Wh関数形)
Whの関数形は、図7に示すように、φの方向に縁線(φ=φa)での0から肩線(φ=φb)での1に滑らかに移行し、その傾き∂Wh/∂φが縁線と肩線のφ方向中間の中間線(φ=φc)に対し対称の関数形であり、2つの傾斜領域R1,R2では同じ関数形であればよく、必ずしも式(17)、式(18)、式(20)及び式(21)で表される関数でなくてもよい。例えば、図7において、φb−φaを半周期とする余弦関数、
Wh={1−cos((φ−φa)・π/(φb−φa))}/2 ……(33)
を用いてもよい。
【0106】
(変形例7:ループの任意性)
上記実施の形態の作用説明は、簡単のために、図2、図3に示すステップS3、S41、S42、S43の処理がそれぞれサイノグラム全体(全n,m,k)の処理を行うように説明しているが、図2,図3に示す処理の流れに限定されない。
【0107】
例えば、kループを外側にして、kループ内でステップS3、S41、S42、S43の処理を行うようにしてもよい。
【0108】
(変形例8:機構追加)
上記実施の形態では、幾何条件を変更するための別の機構を追加してもよい。例えば、図1に示す構成に新たに、ラミノ角αL可変機構、X線焦点Fと検出面4a中心Dとの間の検出距離FDDを相対的に変更する機構などを追加してもよい。
【0109】
また、支持台5と回転・昇降機構6との間にあって、被検体1と支持台5とを回転軸RAと直交する水平方向XYに移動させるXY機構を追加してもよい。このXY機構においては、被検体1を回転軸RAと直交する水平方向XYに移動させることができるので、被検体1を手動で載置しなおすことなく、被検体1の所望とする検査部位をスキャン領域Anに入るような位置に移動させることができる。
【0110】
(変形例9:動きの相対性)
前記実施の形態では、各構成体の動きは相対的であればよく、どちらか1つの構成体を動かしてもよい。例えば、回転軸RAに対する支持台5とX線ビーム2との回転や回転軸移動機構7による回転軸RAの移動は相対的でよい。すなわち、被検体1を回転軸RAに対して回転させる代わりにX線源3とX線検出器5とを互いの位置関係を保ったまま回転軸RAに対して一体的または別体的に回転させ、さらに回転軸RAに対してX線源3とX線検出器5とを移動させてもよい。
【0111】
(変形例10:フィルタリングの変形)(請求項6)
図3に示すフィルタリングの処理を行うに際し、回転軸RAの投影と直交するn方向になだらかにデータを外挿してデータ長を大きくした後、フィルタリングの処理を行えば、スキャン領域の外縁部やその外側であっても、良好な3次元画像を再構成できる。
【0112】
正確に言えば、重み関数Whを乗算したサイノグラムP´に対し、透過像の上で回転軸RAの投影と直交する方向の一方側になだらかにデータ値を拡張し、他方側にも同様になだらかにデータ値を拡張した後、回転軸RAの投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めればよい。
【0113】
このデータ外挿による透過像の拡張は、なだらかに繋がっていれば傾斜する直線でも、曲線であってもよい。ここで、なだらかとはプロファイルが段差なく連続的であることをいう。さらに、プロファイルの拡張部分の傾斜についても、急激な変化が無い方が好ましい。
【0114】
最も簡易なデータ外挿の一例としては、端部の値をそのまま引き伸ばす方法である。正確には、重み関数Whを乗算したサイノグラムP´に対し、透過像の上で回転軸RAの投影と直交する方向の一方側に一方端のデータ値を持つ領域を拡張し、他方側にも同様に他方端のデータ値を持つ領域を拡張した後、回転軸RAの投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めればよい。
【0115】
この変形例10によれば、拡張前の透過像n方向の縁にできる段差を、透過像をn方向になだらかに外挿してデータ長を拡張することにより、外側に追いやるか、無くすことができ、スキャン領域外縁から外にかけての画質を高めることができる。
【0116】
(変形例11:サイノグラムの変数変換1)
上記実施の形態では、サイノグラムP(n,m,k)は画像マトリックスn,mと回転番号kとで記述しているが、例えばθ(n,m)とφ(k)とを用いて座標変換し、P(θ,m,k)あるいはP(θ,m,φ)で記述してもよい。すなわち、θ,φで等間隔のサイノグラムとすることができる。この場合には、重み関数Wh(θ,φ)を変換なしに直接掛けることができる。
【0117】
引き続き、重み関数掛けしたサイノグラムP´(θ,m,k)あるいはP´(θ,m,φ)をn,m,kでの記述に戻すことなく、θ方向に|ω|フィルタリングを行い、その後に逆投影し再構成することができる。
【0118】
(変形例12:サイノグラムの変数変換2)
サイノグラムP(n,m,k)としては、回転軸RAに平行な方向をm´、当該m´と直交する方向をn´とし、P(n´,m´,k)に変換した後、再構成処理を行うこともできる。
【0119】
図11は変形例12におけるサイノグラムPの変数変換を説明する幾何図である。この変換例は、透過像をX線経路に沿って検出面4aから回転軸RAに平行な面(n´,m´)30に投影することで変換し、この変換後のサイノグラムP(n´,m´,k)を得る。
【0120】
再構成処理は、まず、重み関数Wh(θ,φ)を掛けるが、このときθはn´のみの関数θ(n´)となるので、計算は容易になる。続いて、重み関数掛けしたサイノグラムP´(n´,m´,k)をn,m,kでの記述にもどすことなく、n´方向に|ω|フィルタリングを行い、さらに逆投影することで再構成できる。
【0121】
また、この変形例12では、検出面4aを回転軸RAに平行な面(n´,m´)30に重ねるように配置することにより、直接サイノグラムP(n´,m´,k)を得るようにしてもよい。
【0122】
(変形例13:サイノグラムの変数変換3)
さらに、サイノグラムP(n,m,k)の他の変換例としては、回転軸RAに平行な方向をm´とし、P(θ,m´,k)に変換した後、再構成処理を行うこともできる。
【0123】
図12は変形例13におけるサイノグラムPの変数変換を説明する幾何図である。この変換例は、透過像をX線経路に沿って検出面4aから回転軸RAに沿った円周面(θ,m´)31に投影することで変換し、この変換後のサイノグラムP(θ,m´,k)を得る。
【0124】
再構成処理は、まず、重み関数Wh(θ,φ)を掛けるが、このとき重み関数Wh(θ,φ)を直接掛けることができるので、計算は容易になる。
【0125】
引き続き、重み関数掛けしたサイノグラムP´(θ,m´,k)をn,m,kでの記述にもどすことなく、θ方向に|ω|フィルタリングを行い、さらに逆投影することで再構成できる。
【0126】
また、この変形例13では、検出面4aを回転軸RAに沿った円周面31に重ねるように円周面に変形して配置することで直接サイノグラムP(θ,m´,k)を得るようにしてもよい。
【0127】
(変形例14:サイノグラムの変数変換4)
さらに、サイノグラムP(n,m,k)の他の変換例としては、回転軸RAに直交する面上で回転軸RAの投影と平行な方向をm"、このm"と直交する方向をn"とし、P(n",m",k)に変換した後、再構成処理を行うこともできる。
【0128】
図13は変形例14におけるサイノグラムPの変数変換を説明する幾何図である。この変換例は、透過像をX線経路に沿って検出面4aから回転軸RAに直交する面(n",m")32に投影することで変換し、この変換後のサイノグラムP(n",m",k)を得る。
【0129】
再構成処理は、まず、重み関数Wh(θ,φ)を掛けるが、このときθはn",m"の関数θ(n",m")となるので、計算が可能である。
【0130】
続いて、重み関数掛けしたサイノグラムP´(n",m",k)をn,m,kでの記述にもどすことなく、n"方向に|ω|フィルタリングを行い、さらに逆投影することで再構成できる。
【0131】
また、この変形例14では、検出面4aを回転軸RAに直交する面(n",m")32に重ねるように配置することで直接サイノグラムP(n",m",k)を得るようにしてもよい。
【0132】
(変形例15:Whのテーブル化)
重み関数Wh(θ,φ)は、重み関数掛け時にその都度計算する代わりに、予めθ,φの細かいステップで計算してテーブルに記憶しておいてもよい。この場合は、重み係数が欲しいθ,φとテーブルのθ,φとの食い違いが生じるので、最近傍のテーブル値を用いるか、補間値を用いるようにする。
【0133】
この方法はβが一定、すなわち使用する回転範囲K・Δφが一定の場合に有効である。
【0134】
(変形例16:縁線と肩線の変形)(請求項4,5に対応)
上記実施の形態では、重み関数Whを定義する縁線と肩線(図5参照)はサイノグラムPの全データを再構成に用いるように決められているが、縁線と肩線はこれに限らない。
【0135】
図14は縁線と肩線を変更した重み関数Whの例を示す図である。
上記実施の形態で用いた縁線a(a1,a2)、肩線b(b1,b2)、中間線(c1,c2)をそれぞれ元縁線a(a1,a2)、元肩線b(b1,b2)、元中間線c(c1,c2)とすると、この変形例における縁線a´と肩線b´は元縁線a、元肩線bとで囲まれた領域内で自由に設定できる。制限事項としては、縁線a´と肩線b´はθに対する一価関数φ(θ)で表せ、段差がなく、互いに交差せず、縁線a´が肩線b´より元縁線aの近くにあることである。
【0136】
図14(c)を用いて、縁線a´と肩線b´の設定について説明する。
元縁線a1上のパスの逆パスの集合が元肩線b2になり、元肩線b1の逆パスが元縁線a2になり、元中間線c1の逆パスが元中間線c2となる。
【0137】
ここで、元縁線a1を元肩線b1側へ変位させて縁線a1´として設定すると、その逆パスの肩線b2´はb2をa2側へ(同じ変位量をθ方向に反転させ)変位させた線として設定される。同様に、b1をa1´側へ変位させて肩線b1´として設定すると、その逆パスの縁線a2´はa2をb2´側へ(同じ変位量をθ方向に反転させ)変位させた線として設定される。なお、変位は変位量0(変位せず)も含む。
【0138】
ここで、縁線a1´と肩線b2´は互いに逆パスの関係にあるので、どちらか一方を設定すると、他方が設定される関係にあり、どちらかを先に設定しても両方が同時に設定される。同様に、肩線b1´と縁線a2´が互いに逆パスの関係にあるので、どちらを先に設定しても両方が同時に設定される。また、縁線a1´と肩線b1´のφ方向中間線c1´に対し、縁線a2´と肩線b2´のφ方向中間線c2´が互いに逆パスである。
【0139】
図14(a)は対称的な変更の一例を示す図である。元縁線a1、元肩線b1とで囲まれた領域内に元中間線c1に対し、φ方向対称に縁線a1´と肩線b1´を設定する。そして、縁線a1´の逆パスを肩線b2´とし、肩線b1´の逆パスを縁線a2´とする。φ方向の中間線c´は元中間線cと同じである。
【0140】
図14(b)は非対称的な変更の一例を示す図である。ここでは、縁線a1´と肩線b1´を元中間線c1に対し非対称に設定する例である。縁線a1´と中間線c1´と肩線b1´の逆パスがそれぞれ肩線b2´と中間線c2´と縁線a2´となる。
【0141】
図14(c)は非対称な曲線に変更する一例であって、縁線a1´と肩線b1´を曲線により自由に設定した例である。
【0142】
この変形例においては、縁線と肩線による重み関数Whは次のように定義できる。これは最も一般的な定義であって、上記実施の形態の重み関数もこれに含まれる。
【0143】
重み関数Whとしては、(θ,φ)面上で、βを所定の角度として回転角度φの方向にπ+βの幅を持った定義域で定義され、φは該定義域の縁を基準(φ=0)とし、かつ、θは回転軸RAを通るX線経路を基準(θ=0)としたとき、点(0,β)を通ってφのθに対する傾きdφ/dθが2あるいは−2の直線である元肩線b1とφ=0の元縁線a1に対し、元縁線a1を元肩線b1の側へ変位した縁線a1´と元肩線b1を縁線a1´の側へ変位した肩線b1´と、縁線a1´上の点が表すX線経路の逆向きX線経路を表す点の集合である肩線b2´と、肩線b1´上の点が表すX線経路の逆向きX線経路を表す点の集合である縁線a2´を設定する。
【0144】
その結果、Whは、元縁線a1と縁線a1´に挟まれる領域で「0」、肩線b1´と肩線b2´に挟まれた平坦領域R0´で「1」、縁線a2´とφ=π+βの元縁線a2に挟まれる領域で「0」である。
【0145】
一方、縁線a1´と肩線b1´とで挟まれる傾斜領域R1´では、Whはφの方向に縁線a1´での0から肩線b1´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a1´と肩線b1´のφ方向の中間線c1´に対し対称の関数形となる。
【0146】
縁線a2´と肩線b2´とで挟まれる傾斜領域R2´では、Whはφの方向に縁線a2´での0から肩線b2´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが縁線a2´と肩線b2´のφ方向の中間線c2´に対し対称であって、傾斜領域R1´と同じ関数形となる。
ここで、傾斜領域のWhの関数形は上記実施の形態と同様である。
【0147】
この変形例16によれば、実施の形態で述べた場合と同様に、半回転を超え1回転に満たないスキャンを行う円錐軌道断層撮影装置において、サイノグラムP(n,m,k)に対し、回転角度φと回転面に沿った角度θの関数である前述したようなハーフスキャン用重み関数Wh(θ,φ)を乗算したサイノグラムP´(n,m,k)を用いて再構成するので、実質180度分の均質な逆投影がなされ、また逆投影の継ぎ目をなだらかに移行でき、均質で偽像を抑制した3次元画像が得られる。
【0148】
また、以上のように半回転を超え1回転を満たないスキャンが可能になるので、1回転より少ない回転角で済むことにより、被検体1をよりX線源3に近づけることが可能となり、高拡大率で高分解能高品位の3次元画像を得ることができる。
【0149】
(変形例17:検出器)
上記実施の形態では、X線検出器4としてFPDを用いたが、2次元分解能を有するものであれば、他の検出器でも構わない。
【0150】
(変形例18:線源)
上記実施の形態では、放射線源としてマイクロフォーカスX線管を有するX線源3を用いたが、他のX線源でもよく、また、γ線、マイクロ波等の放射線を用いてもよい。
【0151】
(変形例19)
さらに、前述したように多数の変形例を説明したが、これら2つ以上の変形例を多重的に組み合わせた変形例も同様に含むものである。
【0152】
その他、本発明は、上記実施の形態、変形例に限定されるものでなく、その要旨を逸脱しない範囲で種々変形して実施することが可能である。
【図面の簡単な説明】
【0153】
【図1】本発明に係る円錐軌道断層撮影装置の実施の形態を示す構成図であって、同図(a)は正面図、同図(b)は平面図。
【図2】図1に示す制御処理部のスキャン位置設定制御とデータ処理全体の流れを示す図。
【図3】図2に示す再構成処理におけるフロー図。
【図4】実施の形態におけるθとn,mとの関係を示す図であって、同図(a)は平面図、同図(b)は正面図。
【図5】実施の形態におけるハーフスキャン用重み関数Wh(θ,φ)を説明する図であって、同図(a)は(θ,φ)面上のハーフスキャン用重み関数Wh(θ,φ)、同図(b)〜同図(d)は同図(a)の各経路方位角θ上のプロファイル図。
【図6】実施の形態の再構成処理における逆投影を説明する鳥瞰図。
【図7】実施の形態におけるハーフスキャン用重み関数Wh(θ,φ)の傾斜領域における関数形を説明する図。
【図8】実施の形態における回転軸方向から見た順パスB、逆パスBrを示す図。
【図9】実施の形態における重み関数Wh上の順パスB、逆パスBrを示す図。
【図10】実施の形態における回転軸方向及び横から見た逆投影パスを示す図であって、同図(a)は平面図、同図(b)は側面図。
【図11】変形例12におけるサイノグラムPの変数変換例を説明する幾何図であって、同図(a)は平面図、同図(b)は正面図。
【図12】変形例13におけるサイノグラムPの他の変数変換例を説明する幾何図であって、同図(a)は平面図、同図(b)は正面図。
【図13】変形例14におけるサイノグラムPのさらに他の変数変換例を説明する幾何図。
【図14】変形例16における縁線と肩線を変更した重み関数Whの複数例を示す図。
【図15】従来の円錐軌道断層撮影装置の一例を示す模式的な構成図であって、同図(a)は正面図、同図(b)は平面図。
【符号の説明】
【0154】
1…被検体、2…X線ビーム、3…X線源、4…X線検出器、4a…検出面、5…支持台、6…回転・昇降機構(回転手段)、7…回転軸移動機構、10…制御処理本体部、11…入力部、12…制御処理部、12a…スキャン制御部、12b…前処理部、12c…再構成部、13…記憶装置、14…表示部、20…再構成グリッド、22〜24…パスライン、25,27…重み不足分、26,28…補填用重み、F…X線焦点、RA…回転軸、L…X線光軸、αL…ラミノ角、An…スキャン領域。
【特許請求の範囲】
【請求項1】
被検体に向けて放射線ビームを照射する放射線源と、前記被検体から透過してくる放射線ビームを検出する2次元の放射線検出器と、前記放射線源から照射される放射線ビーム内で、前記放射線検出器により検出される放射線ビームの中心線の方向に対し90度より小さなラミノ角で交差する回転軸に対し、前記被検体または所定の位置関係を保ったまま一体的または別体的に前記放射線源,前記放射線検出器を回転させる回転手段と、この回転手段で回転を行いつつ所定の回転角度ごとに前記放射線検出器で検出するスキャンによって検出した前記被検体の透過像を順次取込み、当該被検体の3次元画像を作成する制御処理部とを備えた円錐軌道断層撮影装置において、
前記制御処理部は、前記被検体と放射線源との間で干渉しない回転可能範囲に基づき、前記回転手段により半回転を超え1回転に満たない角度範囲で回転を行いつつ所定の回転角度ごとに前記被検体から透過してくる放射線ビームの透過像を前記放射線検出器で検出するハーフスキャンを実施するスキャン制御手段と、このスキャン制御手段によって前記所定の回転角度ごとに前記放射線検出器で検出された多数の透過像から被検体の3次元画像を作成する再構成手段と
を有することを特徴とする円錐軌道断層撮影装置。
【請求項2】
請求項1に記載の円錐軌道断層撮影装置において、
前記再構成手段は、前記ハーフスキャンの間に前記放射線検出器で検出した多数の透過像を前記回転の順に並べた3次元のサイノグラムPに対し前記回転角度φと放射線経路の前記回転の面に沿った経路方位角θとの関数であるハーフスキャン用重み関数Whを乗算したサイノグラムP´を求め、この求めたサイノグラムP´に対し前記透過像の上で前記回転軸の投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めた後、このサイノグラムP"を逆投影して前記被検体の3次元画像を作成することを特徴とする円錐軌道断層撮影装置。
【請求項3】
請求項2に記載の円錐軌道断層撮影装置において、
前記サイノグラムPとしては、前記透過像の横と縦の画素番号n,mと前記回転の順を示す番号kとに従って並べたサイノグラムであり、
前記再構成手段は、前記n,mからθ、前記kからφをそれぞれ求めるとともに、この求めたθ,φから重み関数Whの値を求めた後、前記サイノグラムP(n,m,k)に前記θ,φから求めた重み関数Whを掛けることにより、重み関数掛けしたサイノグラムP´を得ることを特徴とする円錐軌道断層撮影装置。
【請求項4】
請求項2または請求項3に記載の円錐軌道断層撮影装置において、
前記再構成手段は、前記ハーフスキャン用重み関数Whを乗算したサイノグラムP´に対し、前記透過像の上で前記回転軸の投影と直交する方向になだらかにデータを外挿してデータ長を大きくした後、前記高周波強調フィルタリングを行ってサイノグラムP"を求めることを特徴とする円錐軌道断層撮影装置。
【請求項5】
請求項1ないし請求項4の何れか一項に記載の円錐軌道断層撮影装置において、
前記制御処理部は、予め前記被検体と放射線源との間で干渉しない前記回転可能範囲を取得して設定するスキャン位置設定手段を有することを特徴とする円錐軌道断層撮影装置。
【請求項6】
請求項2ないし請求項4の何れか一項に記載の円錐軌道断層撮影装置において、
前記ハーフスキャン用重み関数Whとしては、前記(θ,φ)面上で、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)と点(0,π)をそれぞれ通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である肩線b1と肩線b2とで挟まれる平坦領域R0の前記重み関数Whは1であり、
φ=0の縁線a1と前記肩線b1とで挟まれる傾斜領域R1の前記重み関数Whは、前記φの方向に縁線a1での0から前記肩線b1での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1と前記肩線b1との前記φ方向の中間線c1に対し対称の関数形であり、
φ=π+βの縁線a2と前記肩線b2とで挟まれる傾斜領域R2の前記重み関数Whは、前記φの方向に前記縁線a2での0から前記肩線b2での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2と前記肩線b2との前記φ方向の中間線c2に対し対称で前記傾斜領域R1と同じ関数形である
ことを特徴とする円錐軌道断層撮影装置。
【請求項7】
請求項2ないし請求項4の何れか一項に記載の円錐軌道断層撮影装置において、
前記ハーフスキャン用重み関数Whとしては、前記(θ,φ)面上において、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)を通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である元肩線b1とφ=0の元縁線a1に対し、前記元縁線a1を前記元肩線b1の側へ変位した縁線a1´と前記元肩線b1を前記縁線a1´の側へ変位した肩線b1´と、前記縁線a1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である肩線b2´と、前記肩線b1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である縁線a2´を設定し、
前記ハーフスキャン用重み関数Whとしては、前記元縁線a1と前記縁線a1´とで挟まれる領域で0、前記肩線b1´と前記肩線b2´とで挟まれる平坦領域R0´で1、前記縁線a2´とφ=π+βの元縁線a2とで挟まれる領域で0であり、
前記縁線a1´と前記肩線b1´とで挟まれる傾斜領域R1´の重み関数Whとしては、前記φの方向に前記縁線a1´での0から前記肩線b1´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1´と前記肩線b1´との前記φ方向の中間線c1´に対し対称の関数形であり、
前記縁線a2´と前記肩線b2´とで挟まれる傾斜領域R2´の前記重み関数Whとしては、前記φの方向に縁線a2´での0から前記肩線b2´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2´と前記肩線b2´との前記φ方向の中間線c2´に対し対称で前記傾斜領域R1´と同じ関数形である
ことを特徴とする円錐軌道断層撮影装置。
【請求項1】
被検体に向けて放射線ビームを照射する放射線源と、前記被検体から透過してくる放射線ビームを検出する2次元の放射線検出器と、前記放射線源から照射される放射線ビーム内で、前記放射線検出器により検出される放射線ビームの中心線の方向に対し90度より小さなラミノ角で交差する回転軸に対し、前記被検体または所定の位置関係を保ったまま一体的または別体的に前記放射線源,前記放射線検出器を回転させる回転手段と、この回転手段で回転を行いつつ所定の回転角度ごとに前記放射線検出器で検出するスキャンによって検出した前記被検体の透過像を順次取込み、当該被検体の3次元画像を作成する制御処理部とを備えた円錐軌道断層撮影装置において、
前記制御処理部は、前記被検体と放射線源との間で干渉しない回転可能範囲に基づき、前記回転手段により半回転を超え1回転に満たない角度範囲で回転を行いつつ所定の回転角度ごとに前記被検体から透過してくる放射線ビームの透過像を前記放射線検出器で検出するハーフスキャンを実施するスキャン制御手段と、このスキャン制御手段によって前記所定の回転角度ごとに前記放射線検出器で検出された多数の透過像から被検体の3次元画像を作成する再構成手段と
を有することを特徴とする円錐軌道断層撮影装置。
【請求項2】
請求項1に記載の円錐軌道断層撮影装置において、
前記再構成手段は、前記ハーフスキャンの間に前記放射線検出器で検出した多数の透過像を前記回転の順に並べた3次元のサイノグラムPに対し前記回転角度φと放射線経路の前記回転の面に沿った経路方位角θとの関数であるハーフスキャン用重み関数Whを乗算したサイノグラムP´を求め、この求めたサイノグラムP´に対し前記透過像の上で前記回転軸の投影と直交する方向に高周波強調フィルタリングを行ってサイノグラムP"を求めた後、このサイノグラムP"を逆投影して前記被検体の3次元画像を作成することを特徴とする円錐軌道断層撮影装置。
【請求項3】
請求項2に記載の円錐軌道断層撮影装置において、
前記サイノグラムPとしては、前記透過像の横と縦の画素番号n,mと前記回転の順を示す番号kとに従って並べたサイノグラムであり、
前記再構成手段は、前記n,mからθ、前記kからφをそれぞれ求めるとともに、この求めたθ,φから重み関数Whの値を求めた後、前記サイノグラムP(n,m,k)に前記θ,φから求めた重み関数Whを掛けることにより、重み関数掛けしたサイノグラムP´を得ることを特徴とする円錐軌道断層撮影装置。
【請求項4】
請求項2または請求項3に記載の円錐軌道断層撮影装置において、
前記再構成手段は、前記ハーフスキャン用重み関数Whを乗算したサイノグラムP´に対し、前記透過像の上で前記回転軸の投影と直交する方向になだらかにデータを外挿してデータ長を大きくした後、前記高周波強調フィルタリングを行ってサイノグラムP"を求めることを特徴とする円錐軌道断層撮影装置。
【請求項5】
請求項1ないし請求項4の何れか一項に記載の円錐軌道断層撮影装置において、
前記制御処理部は、予め前記被検体と放射線源との間で干渉しない前記回転可能範囲を取得して設定するスキャン位置設定手段を有することを特徴とする円錐軌道断層撮影装置。
【請求項6】
請求項2ないし請求項4の何れか一項に記載の円錐軌道断層撮影装置において、
前記ハーフスキャン用重み関数Whとしては、前記(θ,φ)面上で、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)と点(0,π)をそれぞれ通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である肩線b1と肩線b2とで挟まれる平坦領域R0の前記重み関数Whは1であり、
φ=0の縁線a1と前記肩線b1とで挟まれる傾斜領域R1の前記重み関数Whは、前記φの方向に縁線a1での0から前記肩線b1での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1と前記肩線b1との前記φ方向の中間線c1に対し対称の関数形であり、
φ=π+βの縁線a2と前記肩線b2とで挟まれる傾斜領域R2の前記重み関数Whは、前記φの方向に前記縁線a2での0から前記肩線b2での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2と前記肩線b2との前記φ方向の中間線c2に対し対称で前記傾斜領域R1と同じ関数形である
ことを特徴とする円錐軌道断層撮影装置。
【請求項7】
請求項2ないし請求項4の何れか一項に記載の円錐軌道断層撮影装置において、
前記ハーフスキャン用重み関数Whとしては、前記(θ,φ)面上において、前記回転角度φの方向にπ+β(βは所定の角度)の幅を持った定義域で定義され、前記φは当該定義域の縁を基準(φ=0)とし、前記θは前記回転軸を通る前記放射線経路を基準(θ=0)としたとき、
点(0,β)を通って前記φのθに対する傾きdφ/dθが2あるいは−2の直線である元肩線b1とφ=0の元縁線a1に対し、前記元縁線a1を前記元肩線b1の側へ変位した縁線a1´と前記元肩線b1を前記縁線a1´の側へ変位した肩線b1´と、前記縁線a1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である肩線b2´と、前記肩線b1´上の点が表す放射線経路の逆向き放射線経路を表す点の集合である縁線a2´を設定し、
前記ハーフスキャン用重み関数Whとしては、前記元縁線a1と前記縁線a1´とで挟まれる領域で0、前記肩線b1´と前記肩線b2´とで挟まれる平坦領域R0´で1、前記縁線a2´とφ=π+βの元縁線a2とで挟まれる領域で0であり、
前記縁線a1´と前記肩線b1´とで挟まれる傾斜領域R1´の重み関数Whとしては、前記φの方向に前記縁線a1´での0から前記肩線b1´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a1´と前記肩線b1´との前記φ方向の中間線c1´に対し対称の関数形であり、
前記縁線a2´と前記肩線b2´とで挟まれる傾斜領域R2´の前記重み関数Whとしては、前記φの方向に縁線a2´での0から前記肩線b2´での1に滑らかに移行し、かつ、そのφに対する傾き∂Wh/∂φが前記縁線a2´と前記肩線b2´との前記φ方向の中間線c2´に対し対称で前記傾斜領域R1´と同じ関数形である
ことを特徴とする円錐軌道断層撮影装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図11】

【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−85251(P2010−85251A)
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願番号】特願2008−254705(P2008−254705)
【出願日】平成20年9月30日(2008.9.30)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
【公開日】平成22年4月15日(2010.4.15)
【国際特許分類】
【出願日】平成20年9月30日(2008.9.30)
【出願人】(391017540)東芝ITコントロールシステム株式会社 (107)
【Fターム(参考)】
[ Back to top ]