
気体を光学的に検出するためのデバイスと方法
【課題】気体を光学的に検出するためのデバイスを提供する。
【解決手段】流体を光学的に検出するためのデバイスは、そのおのおのがセンサー端と反対側の結合端を備えているいくつかの光学ファイバーを備えている。センサー端のおのおのは光学センサーを備え、センサーは、それで検出される流体の濃度に依存する反射特性を有している。デバイスは、光源と検出器と光学本体を備えている。光学ファイバーの結合端は、互いに距離を置いて光学本体に連結されている。光源と検出器は、光が光源から光学本体を介して伝導され、光学ファイバーの結合端に結合され、また、光学センサーによって反射され、光学ファイバーの結合端から射出される光が、光学本体を介して伝導され、検出器によって受光されるように、光学本体上に配置されている。光学ファイバーの結合端の間の距離は、各結合端からの射出される光が別々に検出され得るものである。

【解決手段】流体を光学的に検出するためのデバイスは、そのおのおのがセンサー端と反対側の結合端を備えているいくつかの光学ファイバーを備えている。センサー端のおのおのは光学センサーを備え、センサーは、それで検出される流体の濃度に依存する反射特性を有している。デバイスは、光源と検出器と光学本体を備えている。光学ファイバーの結合端は、互いに距離を置いて光学本体に連結されている。光源と検出器は、光が光源から光学本体を介して伝導され、光学ファイバーの結合端に結合され、また、光学センサーによって反射され、光学ファイバーの結合端から射出される光が、光学本体を介して伝導され、検出器によって受光されるように、光学本体上に配置されている。光学ファイバーの結合端の間の距離は、各結合端からの射出される光が別々に検出され得るものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、流体を光学的に検出するためのデバイスに関し、いくつかの光学ファイバーと光源と検出器を備えており、光学ファイバーのおのおのはセンサー端と反対側の結合端を有し、センサー端のおのおのは光学センサーを備え、そのセンサーは、それで検出される流体の特性たとえば濃度に依存する反射特性を有している。
【背景技術】
【0002】
本特許出願の文脈に述べられるように、流体を光学的に検出するとの表現は、検出すべき流体の特性の変化の結果としての光学ファイバーのセンサー端において(反射率の)光学的変化を検出することを意味すると理解される。流体のこの特性は、たとえばそのような流体の存在を検出するために、たとえば流体の濃度である。しかしながら、流体のこの特性はまた、流体のpH値または流体の温度とされることが可能である。デバイスは、たとえば、電解質中の反応中にたとえば解放される水素気体を検出することのために、または、水、アルコールほかの中の炭化水素化合物を検出するために使用されることが可能である。光学センサーは、流体(液体および/または気体)を検出するために流体(液体および/または気体)中で使用されることが可能である。
【0003】
さらなる用途は、各センサーでの異なる化合物/元素の検出である。
【0004】
NL1030299は、光スイッチングデバイスが設けられた水素センサーを開示しており、その反射特性は、光スイッチングデバイスが配置された空間中に存在する水素の量に依存する。光スイッチングデバイスは、光学ファイバーと分岐器を介して光源と検出器に連結される。検出器は、光スイッチングデバイスの反射特性の変化を検出し、それから、水素濃度が推定されることが可能である。検出器は、同一空間または異なる領域に位置している光スイッチングデバイスに連結される多数の光学ファイバーに連結されることが可能である。しかしながら、この場合、光スイッチングデバイスは検出器によって順番に読まれ、それは時間を消費する。
【0005】
US5320814は、図22を参照して、着色剤の特性を決定するための光学系を説明している。この着色剤は、一連のファイバーのセンサー端を収容している容器の中に保持され、センサー端のおのおのは、特定の特性を検出することが可能である。光は、ファイバーを介してサンプル容器へ導入され、また、結果の発光信号は、さらなる処理のためのカメラなどの感光検出器に伝導される。
【発明の概要】
【0006】
いくつかの気体表示器を同時に容易に読み取ることが可能である光学デバイスを提供することが本発明の目的である。
【0007】
液体のためのなどの一般的な流体決定のために使用されることが可能である光学デバイスを提供することが本発明のさらなる目的である。
【0008】
この目的は、デバイスは光学本体を備え、光学ファイバーの結合端は互いに距離を置いて光学本体に連結され、光源と検出器は、光が光源から光学本体を介して伝導され光学ファイバーの結合端に入射されるとともに、光学センサーによって反射され光学ファイバーの結合端から射出される光が光学本体を介して伝導され検出器によって受光されるように、光学本体上で配置され、光学ファイバーの結合端の間の距離は各結合端からの射出光が別々に検出されることが可能であるようなものである本発明によって達成される。光学ファイバーの離間した結合端を備えた光学本体の実施形態により、異なる光学センサーを同時に容易に読み取ることが可能である。そのような光学本体は、ファイバーに入射する光ビームのための経路とファイバーに向かって出て行く光束のための経路が区別(distingwished)されることが可能である先行技術から知られるビームスプリッタから区別されなければならない。そのようなビームスプリッタは、ミラーやそれに類するものを使用する。本発明は、単一の「視野」に関係し、光は、それぞれ、その中に入射され、またそこから射出される。
【0009】
さらなる利点は、いくつかの光学ファイバーが単一の光源と単一の検出器に同時に結合されるという事実のため、コストと失敗の発生度が低いというという事実である。さらに、部品数が限定される、整列と較正が単純な手法によって実行されることが可能であるという事実により、アライメントおよびメンテナンス費用が比較的低い。
【0010】
一実施形態では、光学ファイバーの結合端はグリッドにしたがって光学本体に連結され、検出器は、結合端のグリッドに対応する光の点のグリッドにしたがう各結合端から射出光を受光するための像平面に設けられる。グリッドはたとえば正方形または長方形であり、それにより、光の点のグリッドも正方形または長方形のグリッドによって形成される。光の点のこのグリッド中に、ある光の点が、存在しないか、減少した程度で存在するだけならば、これは、関連する光学ファイバーのセンサーが、まったく光を反射しなかったか、不十分な光を反射しただけであることを意味する。これは、そのようなセンサーの位置に存在する流体の濃度に関する情報を与える。
【0011】
そのようなグリッドは特殊であり、言い換えれば、たとえば、光学本体に対して移動されているセンサー端が、光学本体上の光学ファイバーによって作り出された「像」の変位をもたらすことが可能であるならば、グリッドの構造体はそれにもかかわらずそのまま残存する。これは、像を検出するためにたとえばカメラが使用されるならば、このカメラがそのような変位を記録することが可能であり、その結果、複数のセンサーの複数の信号のおのおのの正しい読み取りが保証されることを意味する。
【0012】
第一の光学センサーが、第一の流体の濃度に依存する反射特性を有しており、第二の光学センサーが、第一の流体とは異なる第二の流体の濃度に依存する反射特性を有していることが可能である。センサーのおのおのは、異なる流体を各時刻に検出するために、気体混合物の気体組成など、流体組成物が測定されることが可能であるように具現化されてもよい。
【0013】
特に、本発明によれば、光学ファイバーにおける強度(強度の変化)が決定される。これは、原理的に、観察される色の変化ではないが、導入された光の量の一部分だけが特定の光学ファイバーに戻されることを意味する。
【0014】
一実施形態では、第一の光学センサーは第一の位置に配置されて、第二の光学センサーは第二の位置に配置される。これは、異なる複数の位置において流体濃度を検出することを可能にする。たとえば、センサーは水素センサーとして具現化されてもよく、これらの水素センサーは水素自動車の異なる複数の位置に配置されてもよい。その結果、これらの多数の位置において同時に水素を検出することが容易に可能である。異なる複数の位置との表現は、センサー間に相当な距離があり、それらが互いに接しないことを意味するものと理解される。そのような距離は少なくとも数センチメートルである。
【0015】
第一の実施形態では、第一のセンサーは、流体の第一の濃度において変化する反射特性を有しており、第二のセンサーは、第一の濃度とは異なる同一流体の第二の濃度において変化する反射特性を有している。複数のセンサーのおのおのは、同一流体の異なる濃度を検出するために構成される。したがって、濃度の大きさと、これが増加または減少する速度を知ることが可能である。
【0016】
一実施形態では、複数の光学ファイバーの結合端は、光がその中に入射されることが可能であり、前記結合端から射出されることが可能である共通の結合端平面に位置している。複数の光学ファイバーの結合端は垂直結合端平面を決定する。異なる複数の結合端から射出される複数の光ビームは互いに実質的に平行に進行する。これは、検出器において検出される光の点の像を関連する光学センサーまで簡単な方法でたどってもどることを可能にする。
【0017】
光学本体は、異なるやり方で具現化されることが可能である。結合端平面は、たとえば光学本体の側面に位置しており、一方、光源と検出器は、前記結合端平面の反対側の光学本体の光透過側面に位置している。
【0018】
一実施形態では、光学本体は、結合端平面に対して第一の角度で延びている第一の光透過表面を有し、第一の光透過表面上に光源が配置されており、光学本体は、結合端平面に対して第二の角度で延びている第二の光透過表面を有し、第二の光透過表面上に検出器が配置されている。したがって、光源の光は、光学ファイバーの結合端を十分に強く照明することが可能であり、一方、結合端から射出される光も検出器に容易に見える。この実施形態では、視野は、二つの隣り合う部分に分割され、その一方は、光を取り込むために役立ち、他方は、検出のために役立つ。
【0019】
好ましくは、第一の角度および/または第二の角度は35°よりも小さい。光源と検出器の光透過表面の間の角度は、この場合、たとえば、110°またはそれよりも大きい。第一の角度が35°よりも小さいならば、結合端平面に影を導くかもしれない。光源により近い複数の光学ファイバーの結合端ほどより多くの光を取り込み、一方、光源から最も遠い光学ファイバーの結合端は、それらが影の平面に位置しているという事実のため、場合によっては、もはや光を導入しない。第二の角度が35°よりも小さいならば、検出器は、場合によっては、検出器から最も遠い結合端からもはや光を受光しないかもしれず、また、検出器により近い結合端からより多くの光を受光するかもしれない。結合端が影の中で終了するのを防止するために、結合端は、結合端平面の中央に近づけて配置されることが可能である。
【0020】
一実施形態では、光学本体は、結合端平面に実質的に平行に延びている一つの垂直光透過表面を有しており、前記光透過表面の第一の部分に光源が配置されており、前記光透過表面の第二の部分に検出器が配置されている。その結果、比較的多量の光が入射および射出されることが可能である。
【0021】
光透過表面の第一の部分上の光源が光透過表面の第二の部分上の検出器を取り囲んでいることが可能である。検出器は、光源の内側で、光が入射および射出される結合端平面の実質的に正反対側に位置している。この変形例においても、視野は、たとえば、光が導入される外側周囲上に位置している環状部と中央検出器部に分割される。
【0022】
一実施形態では、光学本体は、ガラスやポリカーボネートなどの光透過材料で構成されており、光学本体は、一つの光透過表面または複数の光透過表面を少なくとも除いて、光吸収コーティングで覆われている表面によって境界が定められている。これは、光源と検出器が配置されているこの目的のために意図された表面を介するものを除いて、抑制されていない方法で光学本体から光が逃げることを不可能にする。ポリカーボネートの代わりに、あらゆる他の光学的に好適な材料が使用されることが可能であり、この目的のために気体を使用することが原理的に可能である。好ましくは、本体は、コントラストを増大させるためにファイバーの端が観察される方向に暗い側面を備えている。
【0023】
光学ファイバーの結合端は、異なるやり方で光学本体に連結されてよい。たとえば、各場合に各光学ファイバーの一つの結合端を受けるために複数の穴が光学本体に設けられている。穴は、検出精度を改善するために、好ましくはいわゆる「屈折率整合流体」で満たされている。または、光学本体は、互いにもたれて配置されたいくつかの本体で構成されてもよい。光学ファイバーは、たとえば、第一の本体を通って第二の本体に設けられた接触面まで延びている。中間に、「屈折率整合流体」が設けられてよい。
【0024】
結合端からの光学ファイバーが実質的に互いに平行に互いに距離を置いて光学本体の中に配置されることが可能である。したがって、結合端は、検出器において容易に認識可能な像を作り出すグリッド中に配置されることが可能である。
【0025】
一実施形態では、デバイスは、センサーによって反射された光を射出するまたは射出しない結合端の、検出器によって受光される像を自動的に認識するための像認識デバイスを備えている。その結果、人間の介在のない迅速で信頼できる検出が可能である。
【0026】
本発明はまた、流体を光学的に検出する方法に関し、
− いくつかの光学ファイバーを備えているデバイスを設けることを有し、前記光学ファイバーのおのおのはセンサー端と反対側の結合端を備え、前記センサー端のおのおのは光学センサーを備え、前記センサーは、それで検出される流体の特性たとえば濃度に依存する反射特性を有しており、前記光学ファイバーの前記結合端は互いに距離を置いて前記光学本体に連結されており、
− 前記光源から前記光学本体を介して前記結合端まで光を伝導し、前記光を前記結合端に連結することと、
− 結合された光を前記結合端から前記光学ファイバーを介して前記センサー端にある前記センサーまで伝導することと、
− 前記センサーの位置において検出される前記流体の前記特性に依存する量の光を前記センサーによって前記センサー端に反射することと、
− 前記センサー端からの前記反射光を前記光学ファイバーを介して前記結合端まで伝導して戻すことと、
− 前記結合端からの前記反射光を射出し、前記結合端からの前記反射され射出された光を前記光学本体を介して前記検出器まで伝導し、前記光は前記検出器によって受光されることと、
− 互いに距離を置いて位置している異なる結合端からの前記反射され射出された光を別々に検出することを有している。
【0027】
前記光学ファイバーの前記結合端はパターンにしたがって前記光学本体に連結されることが可能であり、前記検出器は、前記結合端のパターンに対応する光の点のパターンにしたがう像平面中の各結合端から射出光を受光する。
【0028】
方法のいろいろな用途がある。たとえば、前記光学センサーが、異なる種類の流体(液体および/または気体)を検出したり、前記光学センサーが、異なる位置における濃度を検出したり、前記光学センサーが、同一流体の異なる濃度を検出したりすることが可能である。
【0029】
前記センサーによって反射された光を射出するまたは射出しない前記結合端の、前記検出器によって受光される像が、像認識の手段によって自動的に認識されることが可能である。
【図面の簡単な説明】
【0030】
いま本発明が、添付図面を参照して、より詳しく説明される。
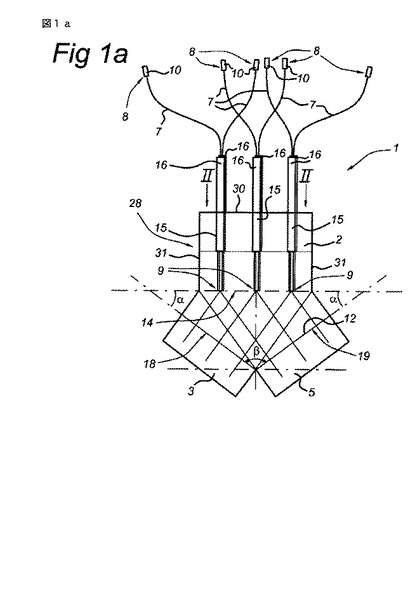
【図1a】図1aは、流体を光学的に検出するためのデバイスの第一の実施形態の平面図を示している。
【図1b】図1bは、図1aに示されたデバイスの斜視図を示している。
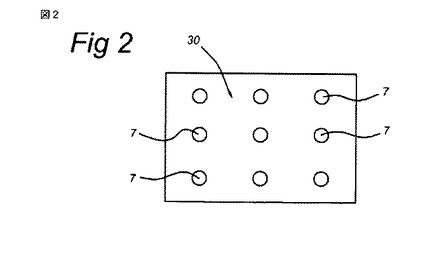
【図2】図2は、図1a中のIIにしたがう背面図を示している。
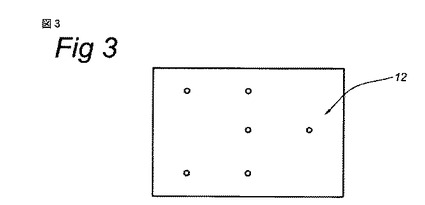
【図3】図3は、図1a,1bに示されたデバイスの検出器によって観察される像を示している。
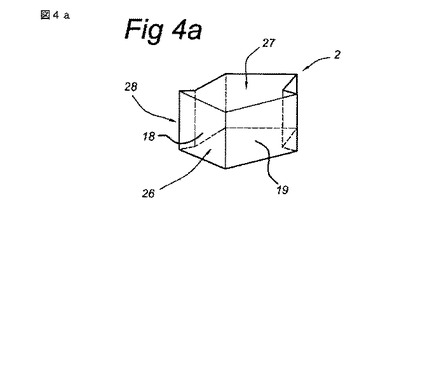
【図4a】図4aは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
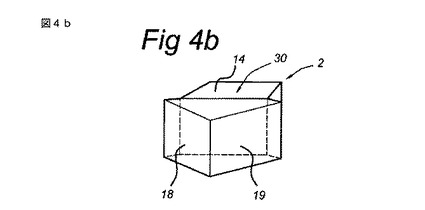
【図4b】図4bは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
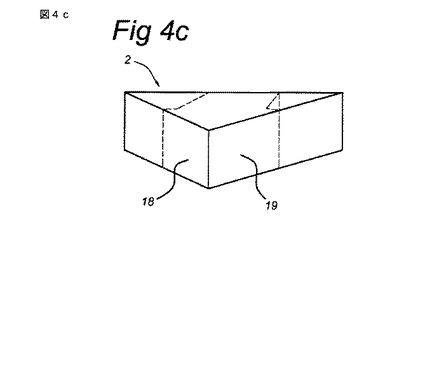
【図4c】図4cは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
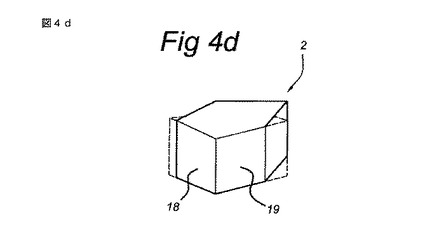
【図4d】図4dは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4e】図4eは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
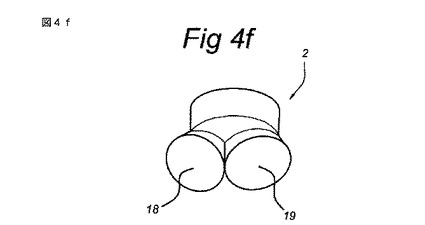
【図4f】図4fは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4g】図4gは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
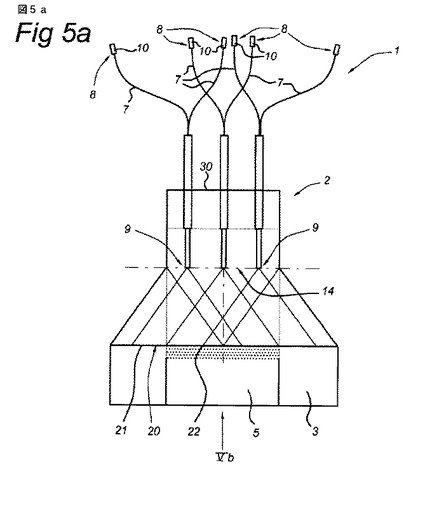
【図5a】図5aは、流体を光学的に検出するためのデバイスの第二の実施形態の平面図を示している。
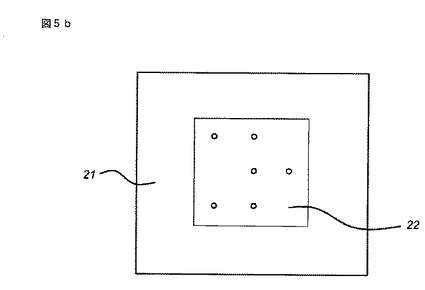
【図5b】図5bは、図5a中のVbにしたがう正面図を示している。
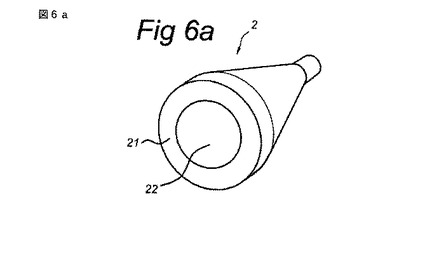
【図6a】図6aは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
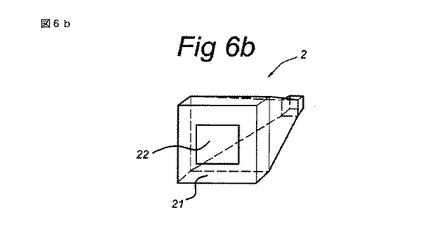
【図6b】図6bは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
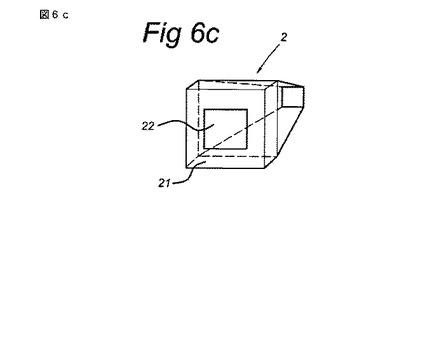
【図6c】図6cは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
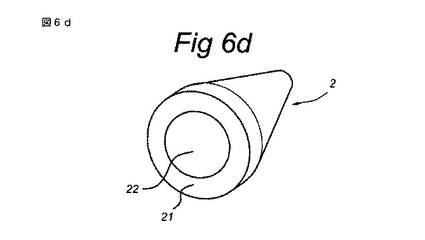
【図6d】図6dは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
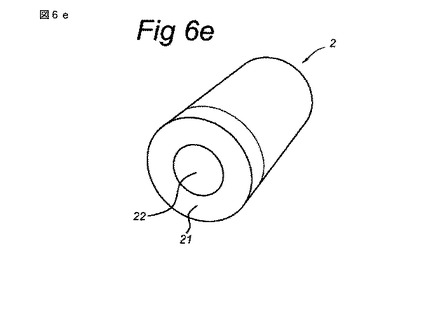
【図6e】図6eは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【図6f】図6fは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【発明を実施するための形態】
【0031】
流体を光学的に検出するためのデバイスが、参照数字1によって図面に全体的に表示される。デバイス1は、いくつかの光学センサー10を備えている。この代表的な実施形態では、デバイス1は、九つの光学センサー10を有しているが、より多数またはより少数のセンサー10が設けられてもよい。各光学センサー10は、センサー10の位置に存在する流体の濃度に依存する反射特性を有している。そのようなセンサー10は、先行技術において一般に知られている。センサー10は、液体または気体を検出するために液体または気体中で使用されることが可能である。この代表的な実施形態では、デバイスは、気体を光学的に検出するように具現化されている。
【0032】
この代表的な実施形態では、センサー10のおのおのは、異なる気体を検出するように具現化される。たとえば、第一のセンサー10は、第一のセンサー10のまわりの水素濃度の変化が生じたときにその反射特性が変わるように水素に感応性の層を備えており、一方、第二のセンサー10は、前記第二のセンサー10のまわりの一酸化炭素濃度の変化が生じたときにその反射特性が変わるように一酸化炭素に感応性の層を備えていている。水素と一酸化炭素に感応性の層の代わりに、第一および/または第二のセンサー10は、二酸化炭素、メタン、酸素、アンモニアまたはアルコールなどの他の気体に感応性の層を備えていてもよい。また、各場合に異なる気体、たとえば前述した気体の一つまたは他の気体を検出するためにさらなるセンサー10が具現化されることも可能である。
【0033】
その代わりに、センサー10は、同一気体を検出するように、すなわち、各センサー10が、センサー10のまわりの前記気体の濃度の変化に対して反射特性が変化するように同一気体に感応性の層を備えるように具現化されてもよい。センサー10が異なる位置に配置されるならば、これらの異なる位置における気体濃度が検出される。たとえば、異なる位置は、水素の存在のためにチェックされることが可能である。
【0034】
特定の実施形態では、複数のセンサー10がそれぞれ異なる感応性層を備え、それらのおのおのが同一気体の異なる量に反応する。これらのセンサー10の信号を互いに比較することによって、絶対的な気体濃度を見つけ出すことが可能である。気体濃度の増大または減少を検出することも可能である。
【0035】
各光学センサー10は、光学ファイバー7の自由端8(センサー端8)に配置されている。各光学ファイバー7は、センサー端8から結合端9まで延びている。各光学ファイバー7は、結合端9からセンサー端8にある光学センサー10へ光を伝導することが可能である。センサー10のまわりの気体濃度に依存する光学センサー10によって反射された光は、同一光学ファイバー7を介して結合端9に伝導される。
【0036】
複数の光学ファイバー7の結合端9は、パターンにしたがって光学本体2に連結されている。この代表的な実施形態では、パターンは、3×3光学ファイバー7によって形成されている(図2参照)。結合端9は、このパターンで互いに距離を置いて位置している。
【0037】
光学本体2は、光透過材料、たとえばガラスや、ポリカーボネートなどの透明プラスティックから作られている。光学本体2は、実質的にブロック形状である。光学本体2は、下側表面26と上側表面27と周表面28によって境界が定められている。この代表的な実施形態では、周表面28は、二つの縦表面31と後ろ表面30と二つの前表面18,19を有している。二つの前表面18,19は、二つの光透過表面18,19を形成している。光学本体2のそのほかの表面26,27,30,31は、暗いまたは黒い塗装などの光吸収コーティングを備えている。
【0038】
この代表的な実施形態では、光学ファイバー7は、光学本体5の後ろ表面30に配置されている。複数の光学ファイバー7の結合端9は、共通の結合端平面14に位置している、すなわち、結合端平面14は、複数の光学ファイバー7の結合端9によって規定される垂直平面である。
【0039】
複数の光学ファイバー7の結合端9は、異なるやり方で共通の結合端平面14に固定されてもよい。この代表的な実施形態では、光学本体5の後ろ表面30に多数の穴15が配置されている。一本の光学ファイバー7が、各穴15内に設けられている。穴15は、「屈折率整合流体」で充てんされている。
【0040】
光学ファイバー7のまわり保護プラスチックスリーブ16が適合されており、それは図1a中に単に部分的に示されている。この代表的な実施形態では、保護プラスチックスリーブ16は、結合端9と「屈折率整合流体」の間の良好な光結合を保証するために光学ファイバー7の端部に沿って結合端9から取り除かれる。穴15は、保護プラスチックスリーブ16なしで光学ファイバー7の端部を収容するための比較的狭い直径を有する部分を有している。その結果、必要とされる「屈折率整合流体」が減る。光学ファイバー7が光学本体2に固定されるときにそれらを補強するために、光学ファイバー7は、保護プラスチックスリーブ16を囲む補強スリーブ(図示せず)が設けられることも可能である。
【0041】
光学本体2の第一の光透過表面18上に光源3が設けられている。この代表的な実施形態では、光源3は単色である。単色光源3は、たとえば、第一の光透過表面18に拡散光平面を作り出す。第二の光透過表面19上に検出器5が配置されている。検出器5は、たとえば、二次元のカメラ、たとえばCCDカメラやCMOSカメラとして設計されている。検出器5は、結合端平面14に合焦させるためのレンズが追加で設けられる。
【0042】
この代表的な実施形態では、光透過表面18,19と結合端平面14の間の角度αは約35°である。その結果、光源3は、互いに距離を置いて配置された複数の結合端9のすべてを照明することが可能であり、また、すべての結合端9は検出器5に見える。光透過表面18,19は、約110°の角度βを囲んでいる。
【0043】
気体を光学的に検出するためのデバイス1の動作は以下のとおりである。単色光源3が、光学本体2を介して伝導され、光学ファイバー7の結合端9に結合される光を作り出す。光学ファイバー7は、入射光を結合端9からセンサー端8にあるセンサー10まで伝導する。センサー10のまわりで存在する気体の量に応じて、センサー10によって光がより多いまたはより少ない程度に任意に反射される。十分に低い気体濃度では、センサー10は光を反射し光学ファイバー7を介して結合端9に戻す。続いて、反射光は、結合端9から射出され、光学本体2を介して検出器5に伝導される。したがって検出器5は結合端平面14の像を受け取り、複数の結合端9は反射光のスポットを作り出すまたは作り出さない。複数の結合端9が互いに距離を置いて位置しているので、異なる結合端9からの反射光は別々に検出されることが可能である。
【0044】
検出器5によって受け取られた結合端平面14の像の一例が図3に示されている。すべてのセンサー10が光を反射すれば、光の点の3×3パターンが目に見える。しかしながら、図3に示された結合端の3×3パターンの像では、中心左と右上と右下の光の点が見えない。これから、対応するセンサー10が、増大した気体濃度を検出し、その結果、光が反射されないか不十分な光が反射されることになる。したがって、気体を検出するためのデバイス1を使用して、いくつかの気体センサーを同時に読み取ることが可能である。
【0045】
結合端平面14の像は、像認識ソフトウェアによって自動的に分析されることが可能である。その結果、異なるセンサー10の自動読み取りが、簡単かつ迅速な手法で実行されることが可能である。
【0046】
ブロック形状の光学本体2の形状は、異なるやり方で実現されることが可能である。ブロック形の光学本体2の例が図4a〜4gに示されている。図4aでは、光学本体2は一つの部品で製造されているが、図4bからの光学本体2は、二つの部品で作られている。後ろ部は、たとえば、黒い材料のブロック形状本体であり、それを通って光学ファイバー7が突き出る。結合端平面14は、二つの部品間の境界面に対応している。
【0047】
図4cは、図4aによる光学本体と同一方法で動作するが、製造がより簡単な光学本体2を示している。図4dは、突出角のない実施形態を示している。この場合、もし望むならば、結合端が影の中に来るのを防止するために、光学ファイバーの結合端は互いにより接近して配置される。図4e〜4gは、丸い形状を有している光学本体2の実施形態を示している。
【0048】
図5aは、流体を検出するためのデバイスの第二の実施形態を示しており、同一の参照数字は同一または同様の部品に対して使用されている。この実施形態は、光学本体2が一つの光透過前表面20だけを有している点だけにおいて図1に示された実施形態と異なっている。光透過前表面20は、二つの部分21,22を備えている(図5b参照)。検出器5は中央部22に配置されており、一方、単色光源3は、中央部22と検出器を取り囲む部分21に配置されている。この実施形態では、単色(環状)光源3の光は、離間された複数の光学ファイバー7の自由端または結合端9に入射する。これらの結合端はまた、検出器5によって検出されることが可能であるセンサー10からのファイバーから出る信号を透過する。ビームスプリッタやミラーや同様物などの付随的な光学的手段が、それぞれ、検出器5と光源3の間の空間中に存在しない。図6a〜6fは、光学本体2がこの場合も異なるやり方で設計されることを示している。
【0049】
本発明は、図面に示された実施形態に限定されない。この分野の当業者は、本発明の範囲内においてさまざまな変更を考えることが可能である。検出器はまた、たとえば、ウェッブカムなどのいわゆる「ラインアレイ」または「2Dアレイ」CCD検出器で具現化されてもよく、たとえば結合端9ごとにいくつかの画素が利用可能である。
【技術分野】
【0001】
本発明は、流体を光学的に検出するためのデバイスに関し、いくつかの光学ファイバーと光源と検出器を備えており、光学ファイバーのおのおのはセンサー端と反対側の結合端を有し、センサー端のおのおのは光学センサーを備え、そのセンサーは、それで検出される流体の特性たとえば濃度に依存する反射特性を有している。
【背景技術】
【0002】
本特許出願の文脈に述べられるように、流体を光学的に検出するとの表現は、検出すべき流体の特性の変化の結果としての光学ファイバーのセンサー端において(反射率の)光学的変化を検出することを意味すると理解される。流体のこの特性は、たとえばそのような流体の存在を検出するために、たとえば流体の濃度である。しかしながら、流体のこの特性はまた、流体のpH値または流体の温度とされることが可能である。デバイスは、たとえば、電解質中の反応中にたとえば解放される水素気体を検出することのために、または、水、アルコールほかの中の炭化水素化合物を検出するために使用されることが可能である。光学センサーは、流体(液体および/または気体)を検出するために流体(液体および/または気体)中で使用されることが可能である。
【0003】
さらなる用途は、各センサーでの異なる化合物/元素の検出である。
【0004】
NL1030299は、光スイッチングデバイスが設けられた水素センサーを開示しており、その反射特性は、光スイッチングデバイスが配置された空間中に存在する水素の量に依存する。光スイッチングデバイスは、光学ファイバーと分岐器を介して光源と検出器に連結される。検出器は、光スイッチングデバイスの反射特性の変化を検出し、それから、水素濃度が推定されることが可能である。検出器は、同一空間または異なる領域に位置している光スイッチングデバイスに連結される多数の光学ファイバーに連結されることが可能である。しかしながら、この場合、光スイッチングデバイスは検出器によって順番に読まれ、それは時間を消費する。
【0005】
US5320814は、図22を参照して、着色剤の特性を決定するための光学系を説明している。この着色剤は、一連のファイバーのセンサー端を収容している容器の中に保持され、センサー端のおのおのは、特定の特性を検出することが可能である。光は、ファイバーを介してサンプル容器へ導入され、また、結果の発光信号は、さらなる処理のためのカメラなどの感光検出器に伝導される。
【発明の概要】
【0006】
いくつかの気体表示器を同時に容易に読み取ることが可能である光学デバイスを提供することが本発明の目的である。
【0007】
液体のためのなどの一般的な流体決定のために使用されることが可能である光学デバイスを提供することが本発明のさらなる目的である。
【0008】
この目的は、デバイスは光学本体を備え、光学ファイバーの結合端は互いに距離を置いて光学本体に連結され、光源と検出器は、光が光源から光学本体を介して伝導され光学ファイバーの結合端に入射されるとともに、光学センサーによって反射され光学ファイバーの結合端から射出される光が光学本体を介して伝導され検出器によって受光されるように、光学本体上で配置され、光学ファイバーの結合端の間の距離は各結合端からの射出光が別々に検出されることが可能であるようなものである本発明によって達成される。光学ファイバーの離間した結合端を備えた光学本体の実施形態により、異なる光学センサーを同時に容易に読み取ることが可能である。そのような光学本体は、ファイバーに入射する光ビームのための経路とファイバーに向かって出て行く光束のための経路が区別(distingwished)されることが可能である先行技術から知られるビームスプリッタから区別されなければならない。そのようなビームスプリッタは、ミラーやそれに類するものを使用する。本発明は、単一の「視野」に関係し、光は、それぞれ、その中に入射され、またそこから射出される。
【0009】
さらなる利点は、いくつかの光学ファイバーが単一の光源と単一の検出器に同時に結合されるという事実のため、コストと失敗の発生度が低いというという事実である。さらに、部品数が限定される、整列と較正が単純な手法によって実行されることが可能であるという事実により、アライメントおよびメンテナンス費用が比較的低い。
【0010】
一実施形態では、光学ファイバーの結合端はグリッドにしたがって光学本体に連結され、検出器は、結合端のグリッドに対応する光の点のグリッドにしたがう各結合端から射出光を受光するための像平面に設けられる。グリッドはたとえば正方形または長方形であり、それにより、光の点のグリッドも正方形または長方形のグリッドによって形成される。光の点のこのグリッド中に、ある光の点が、存在しないか、減少した程度で存在するだけならば、これは、関連する光学ファイバーのセンサーが、まったく光を反射しなかったか、不十分な光を反射しただけであることを意味する。これは、そのようなセンサーの位置に存在する流体の濃度に関する情報を与える。
【0011】
そのようなグリッドは特殊であり、言い換えれば、たとえば、光学本体に対して移動されているセンサー端が、光学本体上の光学ファイバーによって作り出された「像」の変位をもたらすことが可能であるならば、グリッドの構造体はそれにもかかわらずそのまま残存する。これは、像を検出するためにたとえばカメラが使用されるならば、このカメラがそのような変位を記録することが可能であり、その結果、複数のセンサーの複数の信号のおのおのの正しい読み取りが保証されることを意味する。
【0012】
第一の光学センサーが、第一の流体の濃度に依存する反射特性を有しており、第二の光学センサーが、第一の流体とは異なる第二の流体の濃度に依存する反射特性を有していることが可能である。センサーのおのおのは、異なる流体を各時刻に検出するために、気体混合物の気体組成など、流体組成物が測定されることが可能であるように具現化されてもよい。
【0013】
特に、本発明によれば、光学ファイバーにおける強度(強度の変化)が決定される。これは、原理的に、観察される色の変化ではないが、導入された光の量の一部分だけが特定の光学ファイバーに戻されることを意味する。
【0014】
一実施形態では、第一の光学センサーは第一の位置に配置されて、第二の光学センサーは第二の位置に配置される。これは、異なる複数の位置において流体濃度を検出することを可能にする。たとえば、センサーは水素センサーとして具現化されてもよく、これらの水素センサーは水素自動車の異なる複数の位置に配置されてもよい。その結果、これらの多数の位置において同時に水素を検出することが容易に可能である。異なる複数の位置との表現は、センサー間に相当な距離があり、それらが互いに接しないことを意味するものと理解される。そのような距離は少なくとも数センチメートルである。
【0015】
第一の実施形態では、第一のセンサーは、流体の第一の濃度において変化する反射特性を有しており、第二のセンサーは、第一の濃度とは異なる同一流体の第二の濃度において変化する反射特性を有している。複数のセンサーのおのおのは、同一流体の異なる濃度を検出するために構成される。したがって、濃度の大きさと、これが増加または減少する速度を知ることが可能である。
【0016】
一実施形態では、複数の光学ファイバーの結合端は、光がその中に入射されることが可能であり、前記結合端から射出されることが可能である共通の結合端平面に位置している。複数の光学ファイバーの結合端は垂直結合端平面を決定する。異なる複数の結合端から射出される複数の光ビームは互いに実質的に平行に進行する。これは、検出器において検出される光の点の像を関連する光学センサーまで簡単な方法でたどってもどることを可能にする。
【0017】
光学本体は、異なるやり方で具現化されることが可能である。結合端平面は、たとえば光学本体の側面に位置しており、一方、光源と検出器は、前記結合端平面の反対側の光学本体の光透過側面に位置している。
【0018】
一実施形態では、光学本体は、結合端平面に対して第一の角度で延びている第一の光透過表面を有し、第一の光透過表面上に光源が配置されており、光学本体は、結合端平面に対して第二の角度で延びている第二の光透過表面を有し、第二の光透過表面上に検出器が配置されている。したがって、光源の光は、光学ファイバーの結合端を十分に強く照明することが可能であり、一方、結合端から射出される光も検出器に容易に見える。この実施形態では、視野は、二つの隣り合う部分に分割され、その一方は、光を取り込むために役立ち、他方は、検出のために役立つ。
【0019】
好ましくは、第一の角度および/または第二の角度は35°よりも小さい。光源と検出器の光透過表面の間の角度は、この場合、たとえば、110°またはそれよりも大きい。第一の角度が35°よりも小さいならば、結合端平面に影を導くかもしれない。光源により近い複数の光学ファイバーの結合端ほどより多くの光を取り込み、一方、光源から最も遠い光学ファイバーの結合端は、それらが影の平面に位置しているという事実のため、場合によっては、もはや光を導入しない。第二の角度が35°よりも小さいならば、検出器は、場合によっては、検出器から最も遠い結合端からもはや光を受光しないかもしれず、また、検出器により近い結合端からより多くの光を受光するかもしれない。結合端が影の中で終了するのを防止するために、結合端は、結合端平面の中央に近づけて配置されることが可能である。
【0020】
一実施形態では、光学本体は、結合端平面に実質的に平行に延びている一つの垂直光透過表面を有しており、前記光透過表面の第一の部分に光源が配置されており、前記光透過表面の第二の部分に検出器が配置されている。その結果、比較的多量の光が入射および射出されることが可能である。
【0021】
光透過表面の第一の部分上の光源が光透過表面の第二の部分上の検出器を取り囲んでいることが可能である。検出器は、光源の内側で、光が入射および射出される結合端平面の実質的に正反対側に位置している。この変形例においても、視野は、たとえば、光が導入される外側周囲上に位置している環状部と中央検出器部に分割される。
【0022】
一実施形態では、光学本体は、ガラスやポリカーボネートなどの光透過材料で構成されており、光学本体は、一つの光透過表面または複数の光透過表面を少なくとも除いて、光吸収コーティングで覆われている表面によって境界が定められている。これは、光源と検出器が配置されているこの目的のために意図された表面を介するものを除いて、抑制されていない方法で光学本体から光が逃げることを不可能にする。ポリカーボネートの代わりに、あらゆる他の光学的に好適な材料が使用されることが可能であり、この目的のために気体を使用することが原理的に可能である。好ましくは、本体は、コントラストを増大させるためにファイバーの端が観察される方向に暗い側面を備えている。
【0023】
光学ファイバーの結合端は、異なるやり方で光学本体に連結されてよい。たとえば、各場合に各光学ファイバーの一つの結合端を受けるために複数の穴が光学本体に設けられている。穴は、検出精度を改善するために、好ましくはいわゆる「屈折率整合流体」で満たされている。または、光学本体は、互いにもたれて配置されたいくつかの本体で構成されてもよい。光学ファイバーは、たとえば、第一の本体を通って第二の本体に設けられた接触面まで延びている。中間に、「屈折率整合流体」が設けられてよい。
【0024】
結合端からの光学ファイバーが実質的に互いに平行に互いに距離を置いて光学本体の中に配置されることが可能である。したがって、結合端は、検出器において容易に認識可能な像を作り出すグリッド中に配置されることが可能である。
【0025】
一実施形態では、デバイスは、センサーによって反射された光を射出するまたは射出しない結合端の、検出器によって受光される像を自動的に認識するための像認識デバイスを備えている。その結果、人間の介在のない迅速で信頼できる検出が可能である。
【0026】
本発明はまた、流体を光学的に検出する方法に関し、
− いくつかの光学ファイバーを備えているデバイスを設けることを有し、前記光学ファイバーのおのおのはセンサー端と反対側の結合端を備え、前記センサー端のおのおのは光学センサーを備え、前記センサーは、それで検出される流体の特性たとえば濃度に依存する反射特性を有しており、前記光学ファイバーの前記結合端は互いに距離を置いて前記光学本体に連結されており、
− 前記光源から前記光学本体を介して前記結合端まで光を伝導し、前記光を前記結合端に連結することと、
− 結合された光を前記結合端から前記光学ファイバーを介して前記センサー端にある前記センサーまで伝導することと、
− 前記センサーの位置において検出される前記流体の前記特性に依存する量の光を前記センサーによって前記センサー端に反射することと、
− 前記センサー端からの前記反射光を前記光学ファイバーを介して前記結合端まで伝導して戻すことと、
− 前記結合端からの前記反射光を射出し、前記結合端からの前記反射され射出された光を前記光学本体を介して前記検出器まで伝導し、前記光は前記検出器によって受光されることと、
− 互いに距離を置いて位置している異なる結合端からの前記反射され射出された光を別々に検出することを有している。
【0027】
前記光学ファイバーの前記結合端はパターンにしたがって前記光学本体に連結されることが可能であり、前記検出器は、前記結合端のパターンに対応する光の点のパターンにしたがう像平面中の各結合端から射出光を受光する。
【0028】
方法のいろいろな用途がある。たとえば、前記光学センサーが、異なる種類の流体(液体および/または気体)を検出したり、前記光学センサーが、異なる位置における濃度を検出したり、前記光学センサーが、同一流体の異なる濃度を検出したりすることが可能である。
【0029】
前記センサーによって反射された光を射出するまたは射出しない前記結合端の、前記検出器によって受光される像が、像認識の手段によって自動的に認識されることが可能である。
【図面の簡単な説明】
【0030】
いま本発明が、添付図面を参照して、より詳しく説明される。
【図1a】図1aは、流体を光学的に検出するためのデバイスの第一の実施形態の平面図を示している。
【図1b】図1bは、図1aに示されたデバイスの斜視図を示している。
【図2】図2は、図1a中のIIにしたがう背面図を示している。
【図3】図3は、図1a,1bに示されたデバイスの検出器によって観察される像を示している。
【図4a】図4aは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4b】図4bは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4c】図4cは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4d】図4dは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4e】図4eは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4f】図4fは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図4g】図4gは、図1a,1bに示されたデバイスで使用される光学本体の実施形態を示している。
【図5a】図5aは、流体を光学的に検出するためのデバイスの第二の実施形態の平面図を示している。
【図5b】図5bは、図5a中のVbにしたがう正面図を示している。
【図6a】図6aは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【図6b】図6bは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【図6c】図6cは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【図6d】図6dは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【図6e】図6eは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【図6f】図6fは、図5aに示されたデバイスで使用される光学本体の実施形態を示している。
【発明を実施するための形態】
【0031】
流体を光学的に検出するためのデバイスが、参照数字1によって図面に全体的に表示される。デバイス1は、いくつかの光学センサー10を備えている。この代表的な実施形態では、デバイス1は、九つの光学センサー10を有しているが、より多数またはより少数のセンサー10が設けられてもよい。各光学センサー10は、センサー10の位置に存在する流体の濃度に依存する反射特性を有している。そのようなセンサー10は、先行技術において一般に知られている。センサー10は、液体または気体を検出するために液体または気体中で使用されることが可能である。この代表的な実施形態では、デバイスは、気体を光学的に検出するように具現化されている。
【0032】
この代表的な実施形態では、センサー10のおのおのは、異なる気体を検出するように具現化される。たとえば、第一のセンサー10は、第一のセンサー10のまわりの水素濃度の変化が生じたときにその反射特性が変わるように水素に感応性の層を備えており、一方、第二のセンサー10は、前記第二のセンサー10のまわりの一酸化炭素濃度の変化が生じたときにその反射特性が変わるように一酸化炭素に感応性の層を備えていている。水素と一酸化炭素に感応性の層の代わりに、第一および/または第二のセンサー10は、二酸化炭素、メタン、酸素、アンモニアまたはアルコールなどの他の気体に感応性の層を備えていてもよい。また、各場合に異なる気体、たとえば前述した気体の一つまたは他の気体を検出するためにさらなるセンサー10が具現化されることも可能である。
【0033】
その代わりに、センサー10は、同一気体を検出するように、すなわち、各センサー10が、センサー10のまわりの前記気体の濃度の変化に対して反射特性が変化するように同一気体に感応性の層を備えるように具現化されてもよい。センサー10が異なる位置に配置されるならば、これらの異なる位置における気体濃度が検出される。たとえば、異なる位置は、水素の存在のためにチェックされることが可能である。
【0034】
特定の実施形態では、複数のセンサー10がそれぞれ異なる感応性層を備え、それらのおのおのが同一気体の異なる量に反応する。これらのセンサー10の信号を互いに比較することによって、絶対的な気体濃度を見つけ出すことが可能である。気体濃度の増大または減少を検出することも可能である。
【0035】
各光学センサー10は、光学ファイバー7の自由端8(センサー端8)に配置されている。各光学ファイバー7は、センサー端8から結合端9まで延びている。各光学ファイバー7は、結合端9からセンサー端8にある光学センサー10へ光を伝導することが可能である。センサー10のまわりの気体濃度に依存する光学センサー10によって反射された光は、同一光学ファイバー7を介して結合端9に伝導される。
【0036】
複数の光学ファイバー7の結合端9は、パターンにしたがって光学本体2に連結されている。この代表的な実施形態では、パターンは、3×3光学ファイバー7によって形成されている(図2参照)。結合端9は、このパターンで互いに距離を置いて位置している。
【0037】
光学本体2は、光透過材料、たとえばガラスや、ポリカーボネートなどの透明プラスティックから作られている。光学本体2は、実質的にブロック形状である。光学本体2は、下側表面26と上側表面27と周表面28によって境界が定められている。この代表的な実施形態では、周表面28は、二つの縦表面31と後ろ表面30と二つの前表面18,19を有している。二つの前表面18,19は、二つの光透過表面18,19を形成している。光学本体2のそのほかの表面26,27,30,31は、暗いまたは黒い塗装などの光吸収コーティングを備えている。
【0038】
この代表的な実施形態では、光学ファイバー7は、光学本体5の後ろ表面30に配置されている。複数の光学ファイバー7の結合端9は、共通の結合端平面14に位置している、すなわち、結合端平面14は、複数の光学ファイバー7の結合端9によって規定される垂直平面である。
【0039】
複数の光学ファイバー7の結合端9は、異なるやり方で共通の結合端平面14に固定されてもよい。この代表的な実施形態では、光学本体5の後ろ表面30に多数の穴15が配置されている。一本の光学ファイバー7が、各穴15内に設けられている。穴15は、「屈折率整合流体」で充てんされている。
【0040】
光学ファイバー7のまわり保護プラスチックスリーブ16が適合されており、それは図1a中に単に部分的に示されている。この代表的な実施形態では、保護プラスチックスリーブ16は、結合端9と「屈折率整合流体」の間の良好な光結合を保証するために光学ファイバー7の端部に沿って結合端9から取り除かれる。穴15は、保護プラスチックスリーブ16なしで光学ファイバー7の端部を収容するための比較的狭い直径を有する部分を有している。その結果、必要とされる「屈折率整合流体」が減る。光学ファイバー7が光学本体2に固定されるときにそれらを補強するために、光学ファイバー7は、保護プラスチックスリーブ16を囲む補強スリーブ(図示せず)が設けられることも可能である。
【0041】
光学本体2の第一の光透過表面18上に光源3が設けられている。この代表的な実施形態では、光源3は単色である。単色光源3は、たとえば、第一の光透過表面18に拡散光平面を作り出す。第二の光透過表面19上に検出器5が配置されている。検出器5は、たとえば、二次元のカメラ、たとえばCCDカメラやCMOSカメラとして設計されている。検出器5は、結合端平面14に合焦させるためのレンズが追加で設けられる。
【0042】
この代表的な実施形態では、光透過表面18,19と結合端平面14の間の角度αは約35°である。その結果、光源3は、互いに距離を置いて配置された複数の結合端9のすべてを照明することが可能であり、また、すべての結合端9は検出器5に見える。光透過表面18,19は、約110°の角度βを囲んでいる。
【0043】
気体を光学的に検出するためのデバイス1の動作は以下のとおりである。単色光源3が、光学本体2を介して伝導され、光学ファイバー7の結合端9に結合される光を作り出す。光学ファイバー7は、入射光を結合端9からセンサー端8にあるセンサー10まで伝導する。センサー10のまわりで存在する気体の量に応じて、センサー10によって光がより多いまたはより少ない程度に任意に反射される。十分に低い気体濃度では、センサー10は光を反射し光学ファイバー7を介して結合端9に戻す。続いて、反射光は、結合端9から射出され、光学本体2を介して検出器5に伝導される。したがって検出器5は結合端平面14の像を受け取り、複数の結合端9は反射光のスポットを作り出すまたは作り出さない。複数の結合端9が互いに距離を置いて位置しているので、異なる結合端9からの反射光は別々に検出されることが可能である。
【0044】
検出器5によって受け取られた結合端平面14の像の一例が図3に示されている。すべてのセンサー10が光を反射すれば、光の点の3×3パターンが目に見える。しかしながら、図3に示された結合端の3×3パターンの像では、中心左と右上と右下の光の点が見えない。これから、対応するセンサー10が、増大した気体濃度を検出し、その結果、光が反射されないか不十分な光が反射されることになる。したがって、気体を検出するためのデバイス1を使用して、いくつかの気体センサーを同時に読み取ることが可能である。
【0045】
結合端平面14の像は、像認識ソフトウェアによって自動的に分析されることが可能である。その結果、異なるセンサー10の自動読み取りが、簡単かつ迅速な手法で実行されることが可能である。
【0046】
ブロック形状の光学本体2の形状は、異なるやり方で実現されることが可能である。ブロック形の光学本体2の例が図4a〜4gに示されている。図4aでは、光学本体2は一つの部品で製造されているが、図4bからの光学本体2は、二つの部品で作られている。後ろ部は、たとえば、黒い材料のブロック形状本体であり、それを通って光学ファイバー7が突き出る。結合端平面14は、二つの部品間の境界面に対応している。
【0047】
図4cは、図4aによる光学本体と同一方法で動作するが、製造がより簡単な光学本体2を示している。図4dは、突出角のない実施形態を示している。この場合、もし望むならば、結合端が影の中に来るのを防止するために、光学ファイバーの結合端は互いにより接近して配置される。図4e〜4gは、丸い形状を有している光学本体2の実施形態を示している。
【0048】
図5aは、流体を検出するためのデバイスの第二の実施形態を示しており、同一の参照数字は同一または同様の部品に対して使用されている。この実施形態は、光学本体2が一つの光透過前表面20だけを有している点だけにおいて図1に示された実施形態と異なっている。光透過前表面20は、二つの部分21,22を備えている(図5b参照)。検出器5は中央部22に配置されており、一方、単色光源3は、中央部22と検出器を取り囲む部分21に配置されている。この実施形態では、単色(環状)光源3の光は、離間された複数の光学ファイバー7の自由端または結合端9に入射する。これらの結合端はまた、検出器5によって検出されることが可能であるセンサー10からのファイバーから出る信号を透過する。ビームスプリッタやミラーや同様物などの付随的な光学的手段が、それぞれ、検出器5と光源3の間の空間中に存在しない。図6a〜6fは、光学本体2がこの場合も異なるやり方で設計されることを示している。
【0049】
本発明は、図面に示された実施形態に限定されない。この分野の当業者は、本発明の範囲内においてさまざまな変更を考えることが可能である。検出器はまた、たとえば、ウェッブカムなどのいわゆる「ラインアレイ」または「2Dアレイ」CCD検出器で具現化されてもよく、たとえば結合端9ごとにいくつかの画素が利用可能である。
【特許請求の範囲】
【請求項1】
流体を光学的に検出するためのデバイス(1)であって、
− いくつかの光学ファイバー(7)を備えており、そのおのおのは、センサー端(8)と反対側の結合端(9)を備え、前記センサー端(8)のおのおのは光学センサー(10)を備え、前記センサー(10)は、それで検出される流体の特性たとえば濃度に依存する反射特性を有しており、さらに
− 光源(3)と、
− 検出器(5)を備えており、
前記デバイスは光学本体(2)を備え、前記光学ファイバー(7)の前記結合端(9)は互いに距離を置いて前記光学本体(2)に連結され、前記光源(3)と前記検出器(5)は、光が前記光源(3)から前記光学本体(2)を介して伝導され、前記光学ファイバー(7)の前記結合端(9)に入射され、また、前記光学センサー(10)によって反射され、前記光学ファイバー(7)の前記結合端(9)から射出される光が、前記光学本体(2)を介して伝導され、前記検出器(5)によって受光されるように、前記光学本体(2)上に配置されており、また、前記光学ファイバー(7)の前記結合端(9)の間の距離は、各結合端(9)からの射出光が別々に検出されることが可能であるようなものであることを特徴とするデバイス。
【請求項2】
前記光学ファイバー(7)の前記結合端(9)は、パターンにしたがって前記光学本体(2)に連結され、前記検出器(5)は、前記結合端の前記パターンに対応する光の点のパターンにしたがう各結合端(9)からの前記射出光を受光するための像平面(12)に設けられている、請求項1に記載のデバイス。
【請求項3】
第一の光学センサー(10)は、第一の流体の濃度に依存する反射特性を有しており、第二の光学センサー(10)は、第一の流体とは異なる第二の流体の濃度に依存する反射特性を有している、請求項1または2に記載のデバイス。
【請求項4】
第一の光学センサー(10)は、第一の位置に配置されており、第二の光学センサー(10)は、第一の光学センサーに隣り合っていない第二の位置に配置されている、先行請求項のひとつに記載のデバイス。
【請求項5】
第一のセンサー(10)は、流体の第一の濃度において変化する反射特性を有しており、第二のセンサー(10)は、前記第一の濃度とは異なる同一流体の第二の濃度において変化する反射特性を有しており、先行請求項のひとつに記載のデバイス。
【請求項6】
前記光学センサー(10)は、検出される前記流体のpH値に依存する反射特性を有している、先行請求項のひとつに記載のデバイス。
【請求項7】
前記光学センサー(10)は、検出される前記流体の温度に依存する反射特性を有している、請求項6に記載のデバイス。
【請求項8】
前記光学センサー(10)は、検出される前記流体中の元素/化合物の存在に依存する反射特性を有している、先行請求項のひとつに記載のデバイス。
【請求項9】
前記光学ファイバー(7)の前記結合端(9)は、光が前記結合端(9)の中に注入されることが可能であり、また前記結合端(9)から射出されることが可能である共通の結合端平面(14)に位置している、先行請求項のひとつに記載のデバイス。
【請求項10】
前記光学本体(2)は、前記結合端平面(14)に対して第一の角度で延びている第一の光透過表面(18)を有しており、前記光源(3)は、前記第一の光透過表面(18)上に配置されており、前記光学本体(2)は、前記結合端平面(14)に対して第二の角度で延びている第二の光透過表面(19)を有しており、前記検出器(5)は、前記第二の光透過表面(19)上に配置されている、請求項8に記載のデバイス。
【請求項11】
前記第一の角度および/または前記第二の角度は35°よりも小さい、請求項8に記載のデバイス。
【請求項12】
前記光学本体(2)は、前記結合端平面(14)に実質的に平行に延びている垂直光透過表面(20)を有しており、前記光源(3)は、前記光透過表面(20)の第一の部分(21)上に配置されており、前記検出器(5)は、前記光透過表面(20)の第二の部分(22)上に配置されている、請求項9に記載のデバイス。
【請求項13】
前記光透過表面(20)の前記第一の部分(21)上の前記光源(3)は、前記光透過表面(20)の前記第二の部分(22)上の前記検出器(5)を取り囲んでいる、請求項12に記載のデバイス。
【請求項14】
前記光学本体(2)は、ガラスやポリカーボネートなどの光透過材料で構成されており、前記光学本体(2)は、前記光透過表面(20)または前記光透過表面(18,19)を少なくとも除いて、光吸収コーティングで覆われている表面(26,27,28,30,31)によって境界が定められている、請求項10〜13のひとつに記載のデバイス。
【請求項15】
前記光学ファイバー(7)は、前記結合端(9)から、互いに実質的に平行かつ互いに距離を置いて前記光学本体(2)内に配置されている、先行請求項のひとつに記載のデバイス。
【請求項16】
前記デバイス(1)は、前記センサー(10)によって反射された光を射出するまたは射出しない前記結合端(9)の、前記検出器(5)によって受光される、像を自動的に認識するための像認識デバイスを備えている、先行請求項のひとつに記載のデバイス。
【請求項17】
流体を光学的に検出する方法であって、
− 光学本体(2)のほかにいくつかの光学ファイバー(7)と光源(3)と検出器(5)を備えているデバイス(1)を設けることを有し、前記光学ファイバーのおのおのはセンサー端(8)と反対側の結合端(9)を備え、前記センサー端(8)のおのおのは光学センサー(10)を備え、前記センサー(10)は、それで検出される流体の特性たとえば濃度に依存する反射特性を有しており、前記光学ファイバー(7)の前記結合端(9)は互いに距離を置いて前記光学本体(2)に連結されており、
− 光源(3)から光学本体(2)を介して結合端(9)まで光を伝導し、前記光を前記結合端(9)に結合することと、
− 結合された光を前記結合端(9)から前記光学ファイバーを介して前記センサー端(8)にある前記センサー(10)まで伝導することと、
− 前記センサー(10)の位置において検出される前記流体の前記特性に依存する量の光を前記センサー(10)によって前記センサー端(8)に反射することと、
− 前記センサー端(8)からの反射光を前記光学ファイバー(7)を介して前記結合端(9)まで伝導して戻すことと、
− 前記結合端(9)からの前記反射光を射出し、前記結合端(9)からの前記反射され射出された光を前記光学本体(2)を介して前記検出器(5)まで伝導し、前記光は前記検出器(5)によって受光されることと、
− 互いに距離を置いて位置している異なる結合端(9)からの前記反射され射出された光を別々に検出することを有している、方法。
【請求項18】
前記光学ファイバー(7)の前記結合端(9)は、パターンにしたがって前記光学本体(2)に連結され、前記検出器(5)は、前記結合端(9)のパターンに対応する光の点のパターンにしたがう像平面中の各結合端(9)からの射出光を受光する、請求項17に記載の方法。
【請求項19】
前記光学センサー(10)は、異なる種類の流体を検出する、請求項17または18に記載の方法。
【請求項20】
前記光学センサー(10)は、異なる位置における濃度を検出する、請求項17〜20のひとつに記載の方法。
【請求項21】
前記光学センサー(10)は、同一流体の異なる濃度を検出する、請求項17〜20のひとつに記載の方法。
【請求項22】
前記光学センサー(10)は、温度のpH値を検出する、請求項17〜21のひとつに記載の方法。
【請求項23】
前記結合端(9)の前記検出器(5)によって受光された像は像認識によって自動的に認識される、請求項17〜22のひとつに記載の方法。
【請求項1】
流体を光学的に検出するためのデバイス(1)であって、
− いくつかの光学ファイバー(7)を備えており、そのおのおのは、センサー端(8)と反対側の結合端(9)を備え、前記センサー端(8)のおのおのは光学センサー(10)を備え、前記センサー(10)は、それで検出される流体の特性たとえば濃度に依存する反射特性を有しており、さらに
− 光源(3)と、
− 検出器(5)を備えており、
前記デバイスは光学本体(2)を備え、前記光学ファイバー(7)の前記結合端(9)は互いに距離を置いて前記光学本体(2)に連結され、前記光源(3)と前記検出器(5)は、光が前記光源(3)から前記光学本体(2)を介して伝導され、前記光学ファイバー(7)の前記結合端(9)に入射され、また、前記光学センサー(10)によって反射され、前記光学ファイバー(7)の前記結合端(9)から射出される光が、前記光学本体(2)を介して伝導され、前記検出器(5)によって受光されるように、前記光学本体(2)上に配置されており、また、前記光学ファイバー(7)の前記結合端(9)の間の距離は、各結合端(9)からの射出光が別々に検出されることが可能であるようなものであることを特徴とするデバイス。
【請求項2】
前記光学ファイバー(7)の前記結合端(9)は、パターンにしたがって前記光学本体(2)に連結され、前記検出器(5)は、前記結合端の前記パターンに対応する光の点のパターンにしたがう各結合端(9)からの前記射出光を受光するための像平面(12)に設けられている、請求項1に記載のデバイス。
【請求項3】
第一の光学センサー(10)は、第一の流体の濃度に依存する反射特性を有しており、第二の光学センサー(10)は、第一の流体とは異なる第二の流体の濃度に依存する反射特性を有している、請求項1または2に記載のデバイス。
【請求項4】
第一の光学センサー(10)は、第一の位置に配置されており、第二の光学センサー(10)は、第一の光学センサーに隣り合っていない第二の位置に配置されている、先行請求項のひとつに記載のデバイス。
【請求項5】
第一のセンサー(10)は、流体の第一の濃度において変化する反射特性を有しており、第二のセンサー(10)は、前記第一の濃度とは異なる同一流体の第二の濃度において変化する反射特性を有しており、先行請求項のひとつに記載のデバイス。
【請求項6】
前記光学センサー(10)は、検出される前記流体のpH値に依存する反射特性を有している、先行請求項のひとつに記載のデバイス。
【請求項7】
前記光学センサー(10)は、検出される前記流体の温度に依存する反射特性を有している、請求項6に記載のデバイス。
【請求項8】
前記光学センサー(10)は、検出される前記流体中の元素/化合物の存在に依存する反射特性を有している、先行請求項のひとつに記載のデバイス。
【請求項9】
前記光学ファイバー(7)の前記結合端(9)は、光が前記結合端(9)の中に注入されることが可能であり、また前記結合端(9)から射出されることが可能である共通の結合端平面(14)に位置している、先行請求項のひとつに記載のデバイス。
【請求項10】
前記光学本体(2)は、前記結合端平面(14)に対して第一の角度で延びている第一の光透過表面(18)を有しており、前記光源(3)は、前記第一の光透過表面(18)上に配置されており、前記光学本体(2)は、前記結合端平面(14)に対して第二の角度で延びている第二の光透過表面(19)を有しており、前記検出器(5)は、前記第二の光透過表面(19)上に配置されている、請求項8に記載のデバイス。
【請求項11】
前記第一の角度および/または前記第二の角度は35°よりも小さい、請求項8に記載のデバイス。
【請求項12】
前記光学本体(2)は、前記結合端平面(14)に実質的に平行に延びている垂直光透過表面(20)を有しており、前記光源(3)は、前記光透過表面(20)の第一の部分(21)上に配置されており、前記検出器(5)は、前記光透過表面(20)の第二の部分(22)上に配置されている、請求項9に記載のデバイス。
【請求項13】
前記光透過表面(20)の前記第一の部分(21)上の前記光源(3)は、前記光透過表面(20)の前記第二の部分(22)上の前記検出器(5)を取り囲んでいる、請求項12に記載のデバイス。
【請求項14】
前記光学本体(2)は、ガラスやポリカーボネートなどの光透過材料で構成されており、前記光学本体(2)は、前記光透過表面(20)または前記光透過表面(18,19)を少なくとも除いて、光吸収コーティングで覆われている表面(26,27,28,30,31)によって境界が定められている、請求項10〜13のひとつに記載のデバイス。
【請求項15】
前記光学ファイバー(7)は、前記結合端(9)から、互いに実質的に平行かつ互いに距離を置いて前記光学本体(2)内に配置されている、先行請求項のひとつに記載のデバイス。
【請求項16】
前記デバイス(1)は、前記センサー(10)によって反射された光を射出するまたは射出しない前記結合端(9)の、前記検出器(5)によって受光される、像を自動的に認識するための像認識デバイスを備えている、先行請求項のひとつに記載のデバイス。
【請求項17】
流体を光学的に検出する方法であって、
− 光学本体(2)のほかにいくつかの光学ファイバー(7)と光源(3)と検出器(5)を備えているデバイス(1)を設けることを有し、前記光学ファイバーのおのおのはセンサー端(8)と反対側の結合端(9)を備え、前記センサー端(8)のおのおのは光学センサー(10)を備え、前記センサー(10)は、それで検出される流体の特性たとえば濃度に依存する反射特性を有しており、前記光学ファイバー(7)の前記結合端(9)は互いに距離を置いて前記光学本体(2)に連結されており、
− 光源(3)から光学本体(2)を介して結合端(9)まで光を伝導し、前記光を前記結合端(9)に結合することと、
− 結合された光を前記結合端(9)から前記光学ファイバーを介して前記センサー端(8)にある前記センサー(10)まで伝導することと、
− 前記センサー(10)の位置において検出される前記流体の前記特性に依存する量の光を前記センサー(10)によって前記センサー端(8)に反射することと、
− 前記センサー端(8)からの反射光を前記光学ファイバー(7)を介して前記結合端(9)まで伝導して戻すことと、
− 前記結合端(9)からの前記反射光を射出し、前記結合端(9)からの前記反射され射出された光を前記光学本体(2)を介して前記検出器(5)まで伝導し、前記光は前記検出器(5)によって受光されることと、
− 互いに距離を置いて位置している異なる結合端(9)からの前記反射され射出された光を別々に検出することを有している、方法。
【請求項18】
前記光学ファイバー(7)の前記結合端(9)は、パターンにしたがって前記光学本体(2)に連結され、前記検出器(5)は、前記結合端(9)のパターンに対応する光の点のパターンにしたがう像平面中の各結合端(9)からの射出光を受光する、請求項17に記載の方法。
【請求項19】
前記光学センサー(10)は、異なる種類の流体を検出する、請求項17または18に記載の方法。
【請求項20】
前記光学センサー(10)は、異なる位置における濃度を検出する、請求項17〜20のひとつに記載の方法。
【請求項21】
前記光学センサー(10)は、同一流体の異なる濃度を検出する、請求項17〜20のひとつに記載の方法。
【請求項22】
前記光学センサー(10)は、温度のpH値を検出する、請求項17〜21のひとつに記載の方法。
【請求項23】
前記結合端(9)の前記検出器(5)によって受光された像は像認識によって自動的に認識される、請求項17〜22のひとつに記載の方法。
【図1a】

【図1b】

【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図4d】
【図4e】

【図4f】
【図4g】

【図5a】
【図5b】
【図6a】
【図6b】
【図6c】
【図6d】
【図6e】
【図6f】

【図1b】
【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図4d】
【図4e】
【図4f】
【図4g】
【図5a】
【図5b】
【図6a】
【図6b】
【図6c】
【図6d】
【図6e】
【図6f】
【公表番号】特表2012−523562(P2012−523562A)
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−504643(P2012−504643)
【出願日】平成22年4月12日(2010.4.12)
【国際出願番号】PCT/NL2010/050190
【国際公開番号】WO2010/117277
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(500512759)シュティヒティン・エネルギーオンデルツォイク・セントラム・ネーデルランド (15)
【Fターム(参考)】
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成22年4月12日(2010.4.12)
【国際出願番号】PCT/NL2010/050190
【国際公開番号】WO2010/117277
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(500512759)シュティヒティン・エネルギーオンデルツォイク・セントラム・ネーデルランド (15)
【Fターム(参考)】
[ Back to top ]