
画像処理装置

【課題】 欠陥のある検査対象の画像情報の保存件数を増やせ、かつ再現性の良い画像処理装置を提供する。
【解決手段】 検査対象である複数の部品40を載置したトレイ30をCCDカメラ2で撮像し、A/D変換して得られた画像データをフレームメモリ5に格納する。CPU6は、パターンマッチングを行って欠陥の有無を判定する。欠陥有りと判定したときは、その欠陥有りとする一部分の部分的欠陥画像データ70のみを切り出し、取り込み画像データ全領域100での部分的欠陥画像データ70の座標を示す付属情報80を部分的欠陥画像データ70に関連付けて複合データ90としてRAM8やEEPROM16などの記憶手段に保存する。再生するときは、正常全画像データ200を読み出し、それに付属情報80の座標データに基づいて部分的欠陥画像データ70を画像合成し、表示する。
【解決手段】 検査対象である複数の部品40を載置したトレイ30をCCDカメラ2で撮像し、A/D変換して得られた画像データをフレームメモリ5に格納する。CPU6は、パターンマッチングを行って欠陥の有無を判定する。欠陥有りと判定したときは、その欠陥有りとする一部分の部分的欠陥画像データ70のみを切り出し、取り込み画像データ全領域100での部分的欠陥画像データ70の座標を示す付属情報80を部分的欠陥画像データ70に関連付けて複合データ90としてRAM8やEEPROM16などの記憶手段に保存する。再生するときは、正常全画像データ200を読み出し、それに付属情報80の座標データに基づいて部分的欠陥画像データ70を画像合成し、表示する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、欠陥検査用の画像処理装置、特に生産ライン検査システムに装備されて生産される半製品または製品の欠陥(例えば位置ずれなど)を検出するための画像処理装置にかかわり、詳しくは欠陥のある検査対象の画像データの保存の件数を増やすための技術に関する。
【0002】
【従来の技術】従来より、検査対象をCCDカメラ等によって撮像して画像データを取得し、その画像データを画像処理して判定基準と比較することにより欠陥の有無を判定し、欠陥と判定したときにその欠陥のある検査対象についての画像データを外部記憶装置に保存するように構成された画像処理装置が知られている。このような欠陥のある画像データを「NG画像データ」という。NGは「No Good」のことである。
【0003】欠陥有りと判定したときは、一般的には警報または警告を発することが行われる。そのとき直ちに生産ラインを停止するか、それともある程度時間をおいて様子を見てから停止するか、あるいは定刻に停止するかはともかくとして、欠陥有りのときには、歩留まりの低下を抑制するため、その欠陥が何で、どこでどのような原因によって欠陥が発生したのかの欠陥状況を見きわめる必要がある。その場合に、欠陥有り判定時に保存しておいた画像データを再生して表示し、検査要員等がその欠陥のある検査対象の映像を見て、欠陥状況を判断する。そして、その判断の結果に基づいて、該当する原因を見いだし、補修や部品交換などのメンテナンスを行う。
【0004】
【発明が解決しようとする課題】上記した従来の技術には次のような問題点がある。欠陥有り判定時に保存するのは欠陥のある検査対象の画像データ(NG画像データ)の全体についてである。すなわち、画像処理に際してCCDカメラ等より取り込んだ1フレーム分の画像データをフレームメモリに格納するが、欠陥有りと判定したときは、その1フレーム分全体の画像データを丸ごと保存するようにしている。
【0005】しかし、このような欠陥のあるNG画像データを保存しておく記憶エリアの記憶容量にはおのずと一定の限界がある。その記憶エリアの記憶容量として、複数フレーム分を確保しているが、規定フレーム分のNG画像データの格納がなされてしまうと、メモリフルの状態になる。このメモリフルの状態は、特に、欠陥が連続して発生する場合、あるいは間欠的ではあっても頻繁に発生する場合に陥る。このような場合、ソフトウェアによって異なるが、それ以上のNG画像データの保存を禁止する手法があり、また、最も古いNG画像データを破棄したうえで最新のNG画像データを格納するという手法もある。前者の場合には、最新の欠陥についてのNG画像データが得られないという不都合がある。後者の場合には、最も古い欠陥についてのNG画像データが得られなくなって、欠陥原因解析において根本原因が突き止めにくくなるおそれがある。いずれにしても、記憶エリアの記憶容量に限界があるので、欠陥有りのときに1フレーム分全体の画像データを丸ごと保存することが大きな原因となっている。
【0006】記憶容量を大きくすれば、対応ができるマージンが増大するが、それではコストアップは避けられない。
【0007】また、欠陥のある1フレーム分全体の画像データをフレームメモリから読み出して該当の記憶エリアに転送するのには、比較的多くの時間がかかるという問題もある。
【0008】本発明は上記した課題の解決を図るべく創作したものであって、欠陥のある検査対象の画像情報の保存の件数を増やすことのできる画像処理装置を提供することを目的としている。
【0009】
【課題を解決するための手段】上記した課題の解決を図ろうとする本発明にかかわる請求項1の画像処理装置は、次のように構成してある。すなわち、撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの一部分の画像データである部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存するように構成してあることを特徴としている。この構成によると、次のような作用がある。すなわち、欠陥有りと判定したときに、従来技術のように1枚分(1フレーム分)全体の画像データを丸ごと保存するのではなく、その欠陥を含んでいる一部分の画像データである部分的欠陥画像データのみを選択的に切り出して保存するので、限られた記憶容量の記憶エリアに対する欠陥のある検査対象の画像情報の保存の件数を増やすことが可能となる。さらに、部分的欠陥画像データを記憶エリアに転送する時間は、1枚分全体の画像データを転送する場合よりも短くなる。また、保存するのが一部分を切り出した部分的欠陥画像データであっても、取り込み画像データ全領域でその部分的欠陥画像データが占める座標を示す付属情報を併せて保存するから、部分的欠陥画像データを再現したりチェックしたりするうえで不都合は生じない。
【0010】本発明にかかわる請求項2の画像処理装置は、次のような構成となっている。すなわち、検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段とを備えていることを特徴としている。この構成は、請求項1の構成をより具体的に記述するものであって、請求項1と同様の作用を発揮する。
【0011】本発明にかかわる請求項3の画像処理装置は、次のような構成となっている。すなわち、撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存し、再生に際してあらかじめ登録しておいた正常全画像データに対して前記部分的欠陥画像データを前記付属情報に基づいて位置合わせして画像合成するように構成してあることを特徴としている。この構成によると、次のような作用がある。すなわち、請求項1と同様に、限られた記憶容量の記憶エリアに対する欠陥のある検査対象の画像情報の保存の件数を増やせるとともに、記憶エリアに対する部分的欠陥画像データの転送が短時間に行え、さらに、保存するのは部分的欠陥画像データであっても、再生に際しては正常全画像データと画像合成した合成画像データとして再現することが可能であり、その画像合成は取り込み画像データ全領域に占める部分的欠陥画像データの座標を示す付属情報に基づいて行われるので、正確な合成画像データを生成することができ、欠陥のある画像データの再現性を良好なものにすることができて、欠陥原因等をチェックするうえで不都合は生じない。
【0012】本発明にかかわる請求項4の画像処理装置は、次のような構成となっている。すなわち、検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段と、あらかじめ正常全画像データを登録しておく手段と、再生に際して前記正常全画像データと前記部分的欠陥画像データと前記付属情報とを読み出し前記付属情報に基づいて前記部分的欠陥画像データを前記正常全画像データに対して位置合わせして画像合成する手段と、その画像合成で得られた合成画像データを読み出して表示用の映像信号に変換する手段とを備えていることを特徴としている。この構成は、請求項3の構成をより具体的に記述するものであって、請求項3と同様の作用を発揮する。
【0013】本発明にかかわる請求項5の画像処理装置は、上記請求項1〜4において、前記検査対象が搬送されるものであり、その搬送経路の所要の検査ポイントに前記検査対象が到達したことを検出する到達検出手段を備えており、この到達検出手段による検出信号をトリガとして前記検査対象の撮像および欠陥判定を行うように構成してあることを特徴としている。この構成によると、検査対象が搬送されるものであっても、その検査対象をタイミング良く撮像して、上記の作用を得ることが可能となる。
【0014】本発明にかかわる請求項6の画像処理装置は、上記請求項1〜5において、前記検査対象における検査項目が取り込み画像データに含まれる複数の部分画像の位置ずれまたは品種違いとされていることを特徴としている。本発明は、位置ずれや品種違いの判定に有効な機能を発揮する。
【0015】
【発明の実施の形態】以下、本発明にかかわる画像処理装置の実施の形態を図面に基づいて詳細に説明する。
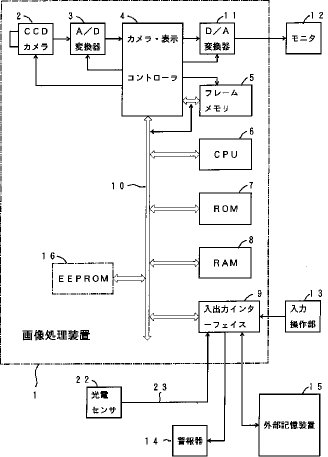
【0016】図1は実施の形態の画像処理装置の電気的構成を示すブロック図である。図1において、符号の1は当該の画像処理装置、2は撮影レンズや絞りなどを含む光学系および固体撮像手段の代表例であるCCD(電荷結合デバイス)などからなるCCDカメラであり、このCCDカメラ2は、撮影レンズによってCCD上に光学像を結像し、結像された光学像をCCDで光電変換して電気信号として出力するものである。3はCCDカメラ2からのアナログの映像信号(CCD出力信号)をディジタル化して画像データに変換するA/D変換器、4はCCDカメラ2、A/D変換器3およびフレームメモリ5に対してタイミング信号を出力して画像データの取得のタイミング制御を行うとともに、フレームメモリ5およびD/A変換器11に対してタイミング信号を出力して取得の映像信号の表示のタイミング制御を行うカメラ・表示コントローラ、5は画像データ一時記憶手段の一例としてのフレームメモリ、6はシステム全体の制御を司る制御手段の一例としてのCPU(中央演算処理装置)、7はCPU6による演算・制御等のためのプログラムを格納しているROM(リードオンリーメモリ)、8はCPU6の演算・制御等を補助するとともにデータを格納するRAM(ランダムアクセスメモリ)、9は外部との間でデータや制御信号の入出力を行う入出力インターフェイス、10はCPU6、ROM7、RAM8、カメラ・表示コントローラ4、フレームメモリ6および入出力インターフェイス9を接続するバス、11はフレームメモリ5からカメラ・表示コントローラ4を介しての画像データをアナログの映像信号に変換するD/A変換器、12は画像処理装置1に図示しないインターフェイスおよびケーブルを介して接続されているCRT(陰極線管)や液晶ディスプレイ(LCD)などのモニタである。フレームメモリ5は、少なくとも1フレーム分以上の画像データを蓄積できる画像メモリであって、VRAM、SRAM、DRAMなどが一般的に使用されるが、ここではバス10とは独立動作可能なVRAMを使用しているものとする。なお、カメラ・表示コントローラ4とフレームメモリ5とはパラレルなバスラインを介して接続されている。また、入出力インターフェイス9には、RAM8に必要な初期値、判定基準等のためのパラメータ、しきい値、その他の条件、必要なデータなどを設定入力したり、必要な指示を与えたりするためのワイヤードリモコンなどの入力操作部13や画像処理装置1の内部の状況や判断結果などをオペレータや検査要員等に知らせるための警報器14やインジケータをそれぞれ個別のケーブルを介して接続することが可能となっている。なお、ワイヤードリモコンに代えてワイヤレスリモコンを用いることも可能とし、この場合は、リモコン受信機の出力端子を入出力インターフェイス9に接続するものとする。警報器14としては、LED(発光ダイオード)、蛍光表示管その他任意の発光素子、灯器、あるいはブザーなどの鳴動器が適用可能とする。さらに、入出力インターフェイス9には、必要な外部記憶装置15を接続することができるものとする。その外部記憶装置15としては、ハードディスクドライブなどの磁気記録デバイス、MO(Magneto Optics)ディスクドライブやDVD(Digital Versatile Disk)‐RAMドライブなどの光磁気記録デバイス、フラッシュメモリ、EEPROMその他の不揮発性メモリなどの半導体記憶デバイスなどがあり、さらにはVTR(ビデオテープレコーダ)などでもよいものとする。
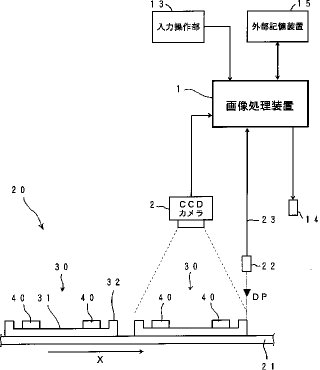
【0017】図2は上記構成の画像処理装置1を適用する生産ライン検査システム20の概要を示す。図2において、符号の21は計測対象物30を搬送するコンベヤなどの搬送手段、22は搬送手段21の近傍で搬送されていく計測対象物30の到達を検出するための到達検出手段の一例としての光電センサであり、検査ポイントDPに配置されている。光電センサ22はケーブル23を介して画像処理装置1の入出力インターフェイス9に接続されている。なお、説明の便宜上、図2においては、CCDカメラ2を画像処理装置1の外側に出して描いているが、実際には、CCDカメラ2は画像処理装置1と一体となっている。もっとも、CCDカメラ2を画像処理装置1とは別体構成とし、両者をケーブルで接続した態様としてもよい。Xは搬送手段21による搬送方向を示す。
【0018】図2においては、計測対象物30として、複数の部品40を所定間隔をおいて所定位置に載置したトレイが示されている。図3はトレイ30とそれに載置されている複数の部品40とを示す概略の平面図である。符号の31はトレイ30の底部をなす載置面、32はトレイ30の周囲の立ち上がり壁である。この例では、部品40を6個載置するようにしている。もっとも、このような数値は単なる例示にすぎず、仕様に応じて適宜に変更してよいことはいうまでもない。CCDカメラ2は、搬送手段21によって搬送されていくトレイ30および部品40をその真上から撮像するように、搬送手段21の直上に配置されている。なお、後に説明するが、計測対象物30としては、何も部品を載置したトレイに限る必要はなく、画像処理による検査が可能なものであれば、どのようなものを検査対象としてもよいことを付記しておく。ここでのトレイ30は一例にすぎない。
【0019】次に、上記のように構成された実施の形態の場合の生産ライン検査システム20に適用された画像処理装置1の動作を説明する。
【0020】駆動されている搬送手段21によって複数の計測対象物(トレイ)30が所定の間隔を隔てて連続的に搬送されていく。計測対象物30は、検査ポイントDPの少し上手側において、図示しないアライメント装置により、搬送手段21上における位置決めが行われているものとする。検査ポイントDPに達した計測対象物(トレイ)30があると、その検査ポイントDPに設置されている到達検出手段22が動作する。到達検出手段22が光電センサの場合は、次のような動作となる。光電センサ22は、レーザーダイオードなどの発光素子とフォトダイオードなどの受光素子からなり、発光素子から出射したレーザービームなどが計測対象物30に当たって反射し、その反射光を受光素子で捕捉し、電気信号に変換し増幅することにより到達検出を行う。
【0021】計測対象物30が検査ポイントDPに到達したことを到達検出手段22が検出すると、到達検出手段22はその検出信号をトリガ信号として画像処理装置1に送出する。画像処理装置1においては、その入出力インターフェイス9を介して入力されてきたトリガ信号がバス10を介してCPU6に与えられる。CPU6はトリガ信号を入力すると、カメラ・表示コントローラ4に起動信号を出力する。カメラ・表示コントローラ4は起動信号を入力すると、CCDカメラ2、A/D変換器3、フレームメモリ5およびD/A変換器11に対してタイミング信号を出力する。
【0022】CCDカメラ2におけるCCDはタイミング信号を入力すると、その電子シャッタを開き作動させ、被写体である計測対象物30を撮像する。すなわち、計測対象物30の光学像が撮像レンズを介してCCDの表面に結像し、CCDはその光学像を信号電荷として蓄積しているが、タイミング信号を入力すると、感光部のフォトダイオードから垂直転送CCDへの転送および垂直転送CCDから水平転送CCDへの転送を行い、出力アンプを介して映像信号として出力する。A/D変換器3はタイミング信号の入力によって起動し、CCDカメラ2から入力したアナログの映像信号(CCD出力信号)をディジタルの画像データに変換する。このA/D変換器3のビット数を例えば8ビットとすると、画像データは256階調となる。フレームメモリ5はタイミング信号を入力し、A/D変換器3と同期をとった状態でA/D変換器3からの1フレーム分の画像データを格納する。なお、8ビットについては、一例にすぎなくて、仕様に応じて適宜に変更してよいことはいうまでもない。
【0023】カメラ・表示コントローラ4は、フレームメモリ5への画像データの書き込みと並行して、その書き込んだ画像データをフレームメモリ5から読み出し、D/A変換器11に転送する。D/A変換器11は、転送されてきた画像データをアナログの映像信号に変換し、モニタ12に出力する。なお、モニタ12に至る映像信号は、図示しない所要のビデオエンコーダなどによりNTSC方式などモニタ12に適合した所要のフォーマットに変換されているものとする。このようにして、計測対象物30の到達を検出した時点から、その計測対象物30を被写体像とする映像をモニタ12にリアルタイムに映出する。
【0024】カメラ・表示コントローラ4は1フレーム分の画像データのフレームメモリ5に対する書き込みが完了すると、その書き込み完了信号をCPU6に出力する。その書き込み完了信号を入力したCPU6は、ROM7から読み出したプログラムおよびRAM8から読み出した画像処理演算用条件に従って、フレームメモリ5をアクセスし、フレームメモリ5に格納されている1フレーム分全体の画像データを読み出す。そして、1画素単位または複数画素の集合であるブロック単位で所要の画像処理のための演算を実行し、判定のための演算結果をRAM8にストアする。次に、その演算結果とRAM8から読み出した判定基準との比較を行い、演算結果が正常であるか否かを判定する。
【0025】RAM8には、あらかじめ入力操作部13から入出力インターフェイス9およびバス10を介して画像処理演算用条件や判定基準が設定登録されている。画像処理演算用条件としては、部品40を識別するための濃度値についてのしきい値や部品40の載置位置の良否を判定するためのしきい値(上限値と下限値)や部品40のサイズ、形状などの種別を判定するためなどの判定基準がある。
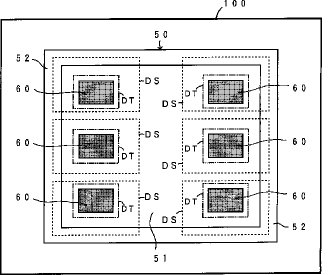
【0026】トレイ30上の複数の部品40の載置状態の良否判定の場合は、具体的に次のようになる。図4はパターンマッチングの動作説明図である。図4において、符号の50は図3に示す計測対象物すなわちトレイ30についての画像データであるトレイ画像、51は載置面31についての画像データである載置面画像、52は立ち上がり壁32についての画像データである立ち上がり壁画像、60は部品40についての画像データである部品画像、100は取り込み画像データ全領域である。図4に示すように、CCDカメラ2によって撮像され、フレームメモリ5に格納されている取り込み画像データ全領域100において、正規の部品画像60の位置に対応してあらかじめ設定されている破線矩形で図示した計測サーチ領域DSを高速サーチして部品画像60らしきものを見いだし、RAM8から読み出した部品形状に相当するテンプレート画像データと画素比較することのパターンマッチングに基づいて、二点鎖線矩形で図示した計測対象基準画像検出領域DTを抽出し、その計測対象基準画像検出領域DTでの両者の画像データの一致度を算出し、その一致度が所定のしきい値以上となっているか否かを判断し、しきい値以上となっているときは欠陥無しすなわち部品画像60についての位置ずれ無しと判定し、しきい値未満のときは欠陥有りすなわち部品画像60についての位置ずれ有りと判定する。また、一致度が所定値以下(この所定値は前記のしきい値よりかなり低く設定されている)のときは、部品が存在していないものと判定する。図4の場合は、すべての部品画像60がトレイ画像50に対して適正な位置にあると判断される。すなわち、トレイ30において複数の部品40がすべて適正な位置関係で載置されていることになる。
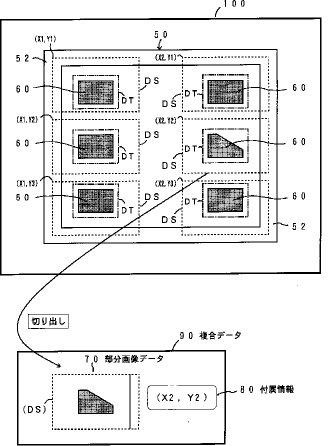
【0027】図5の場合は、取り込み画像データ全領域100において、1つの例えば左下の部品画像60が正規の位置よりも判定基準以上にずれている。すなわち、計測対象基準画像検出領域DTが判定基準以上にずれていて一致度がしきい値未満となっており、欠陥有りと判定されることになる。この場合は、その判定基準以上にずれている1つの部品画像60について計測サーチ領域DSでの画像データの切り出しを行い、それを欠陥のある部分的欠陥画像データ70として保存する。つまり、欠陥のある画像データの保存に際して、従来の技術の場合のように取り込み画像データ全領域100の丸ごとを対象とするのではなく、欠陥のある1つの部品画像60の計測サーチ領域DSに相当する部分的欠陥画像データ70のみを切り出して保存するのである。この場合に、その切り出した部分的欠陥画像データ70の座標データを付属情報80として部分的欠陥画像データ70に関連付けて保存する。
【0028】付属情報80である座標データとしては、各計測サーチ領域DSの左上角部のX座標とY座標の組み合わせでよく、それぞれ、(X1 ,Y1 ),(X1 ,Y2),(X1 ,Y3 ),(X2 ,Y1 ),(X2 ,Y2 ),(X2 ,Y3 )で表される。なお、このような各計測サーチ領域DSについての座標データはあらかじめRAM8に設定登録されているものとする。
【0029】図5の場合には、付属情報80の座標データとしては、(X1 ,Y3 )が選択される。CPU6は、欠陥有りと判定した部品画像60についての部分的欠陥画像データ70と対応する座標データである付属情報80とを関連付けて複合データ90となし、この複合データ90をバス10を介してRAM8に転送格納する。
【0030】なお、ここでは、RAM8は充分に大きな記憶容量をもっているものとし、かつ、電源をオフしても記憶内容が消えないように、RAM8に対してバックアップを行っているものとする。そのバックアップは、例えばリチウム電池でもよいし、大容量のキャパシタでもよい。なお、RAM8に代えて、図1でバス10に接続した二点鎖線で示すEEPROM16に複合データ90を保存するようにしてもよい。むしろ、その方が良い。以下では、「RAM8やEEPROM16などの記憶手段」と記述することとする。
【0031】図6の場合は、取り込み画像データ全領域100において、1つの例えば右側中央の部品画像60が正規の形状とは相違している。この場合も、一致度がしきい値未満となっていて欠陥有りと判定されることになり、その欠陥の1つの部品画像60について計測サーチ領域DSでの画像データの切り出しを行い、その欠陥のある部分的欠陥画像データ70と対応する座標データを付属情報80として関連付け、複合データ90としてRAM8やEEPROM16などの記憶手段に保存する。図6の場合の付属情報80の座標データとしては、右側中央の計測サーチ領域DSに対応した座標データ(X2 ,Y2 )が付属情報80として選択される。
【0032】なお、部品画像60の面積すなわち画素数が正規と異なる場合も同様の処理が行われる。欠陥有りと判定される部品画像60が複数生じる場合もある。そのような一例を図7に示しておく。この場合は、欠陥のあるそれぞれの部分的欠陥画像データ70とそれぞれに対応する座標データを付属情報80として関連付け、複合データ90としてRAM8やEEPROM16などの記憶手段に保存することになる。
【0033】なお、以上のようなパターンマッチングによる画像処理の結果は、カメラ・表示コントローラ4およびD/A変換器11を介してモニタ12に表示される。また、CPU6は、1つでも欠陥を判定したときは、警告信号を出力する。その警告信号はバス10および入出力インターフェイス9を介して外部に接続の警報器14に送出され、その警報器14を動作させることにより、オペレータに対してリアルタイムに異常(NG)が発生したことを知らせる。
【0034】以上のCPU6による動作の概要を図8のフローチャートに示しておく。なお、警告信号の出力はステップS7の直後であってもよい。
【0035】次に、欠陥原因の解析の作業の場合の動作について説明する。
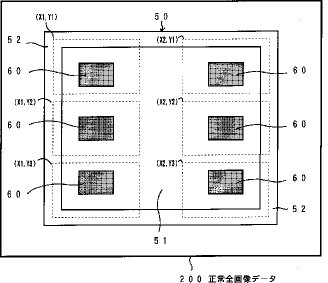
【0036】図9に示すように、RAM8やEEPROM16などの記憶手段には取り込み画像データ全領域100の正常な全画像データ200が格納されているものとする。この正常全画像データ200のRAM8やEEPROM16などの記憶手段への格納については、トレイ30および複数の部品40の組み合わせ仕様に応じてあらかじめ求めたものを外部記憶装置15に格納しておき、必要に応じて選択して外部記憶装置15から入出力インターフェイス9およびバス10を介してRAM8やEEPROM16などの記憶手段に転送格納するのである。また、CCDカメラ2から取り込んでフレームメモリ5に格納した取り込み画像データ全領域100について正常と判断したときに、それを正常全画像データ200としてRAM8やEEPROM16などの記憶手段に転送格納するのでもよい。あるいは、必ずしもRAM8やEEPROM16などの記憶手段に格納しておく必要はなく、外部記憶装置15に転送格納しておくのでもよい。
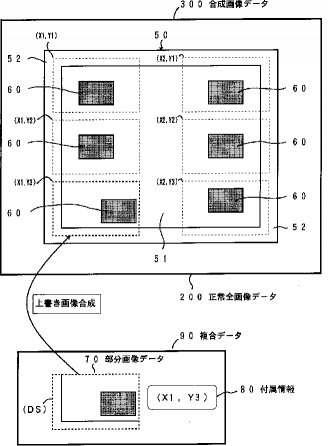
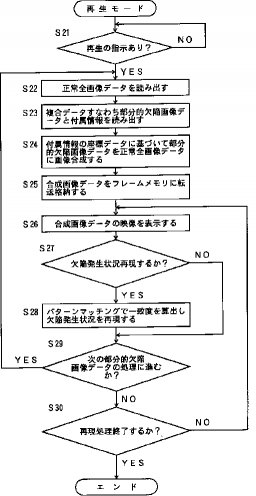
【0037】オペレータまたは別の検査要員やメンテナンス要員が欠陥原因解析を行うときに、入力操作部13からの所要の操作を行うと、CPU6は、正常全画像データ200を読み出し、次いで、異常(NG)とされた部品画像60についての複合データ90すなわち部分的欠陥画像データ70とそれに関連する付属情報80とを読み出す。付属情報80は、その部分的欠陥画像データ70が正常全画像データ200においてどの位置を占めるかについての座標データである。CPU6は、その座標データに基づいて部分的欠陥画像データ70を正常全画像データ200に対して上書き式に画像合成し、合成画像データ300を生成する。図10は、その画像合成の様子を示す。そして、その合成画像データ300をフレームメモリ5に転送格納し、カメラ・表示コントローラ4およびD/A変換器11を介して合成画像データ300をモニタ12に送出し、モニタ12において合成画像データ300の映像を映出する。
【0038】検査要員等は、その合成画像データ300の映像の表示を見ることにより、欠陥の原因を究明する。必要に応じて、入力操作部13からの操作により、モニタ12に映出されフレームメモリ5に格納されている合成画像データ300について再度の画像処理を行うことも可能である。この場合に、合成画像データ300の全体について欠陥の有無の判定を行う画像処理を実施してもよいし、あらかじめ分かっている欠陥のある部分的欠陥画像データ70の領域においてのみ画像処理を実施してもよい。後者の場合は、欠陥のある部分的欠陥画像データ70を指定するに際して、それに関連している付属情報80の座標データに基づいて指定する。これによって、欠陥発生状況を再現することができる。
【0039】以上のCPU6による動作の概要を図11のフローチャートに示しておく。
【0040】なお、異常(NG)とされた部分的欠陥画像データ70とそれに関連する付属情報80との複合データ90をRAM8やEEPROM16などの記憶手段に保存するに際して、必ずしも同一記憶エリアに保存することは必須の要件ではない。欠陥有りの部分的欠陥画像データ70と付属情報80とをRAM8やEEPROM16などの記憶手段の保存エリアの別の領域に分けて保存し、両者を関係付けるデータ、すなわち当該の部分的欠陥画像データ70を格納するアドレスと当該の付属情報80を格納するアドレスとを関係付けたデータをさらに保存すればよいのである。
【0041】なお、RAM8やEEPROM16などの記憶手段として大容量のものを採用し、多数の欠陥有りの部分的欠陥画像データおよびそれに関連する付属情報をまとめて、すなわちデータベース化して保存しておくようにすれば、異常の発生原因や発生箇所などについての解析を統計的に行う上で有利となる。検査要員や解析要員は、欠陥の発生がいつから始まっていつまで続いたか、欠陥が量的にどのように変化していったかを解析する。
【0042】以上のように、本実施の形態の画像処理装置においては、トレイ画像50において複数の部品画像60のうち1つでも欠陥有り(位置ずれや形状異常など有り)と判定したとは、従来技術のように1フレーム分全体の画像データを丸ごと保存するのではなく、その欠陥を含んでいる部分的欠陥画像データ70のみを選択的に切り出して保存するので、記憶容量が限られているRAM8やEEPROM16などの記憶手段においても、そのような部分的欠陥画像データ70の保存件数を増やすことができる。すなわち、メモリフルになるまでの保存件数が従来技術に比べて大幅に増加する。部分的欠陥画像データ70とともに座標データを付属情報80として保存するが、付属情報80の容量は少ないものですむ。6つの部品画像60のうち1つだけ欠陥があるときには、図5や図6から推測できるように使用する記憶容量は従来技術の場合の6分の1以下となることは明らかである。特に、欠陥が連続して発生した場合であっても、あるいは間欠的ではあっても頻繁に発生する場合であっても、メモリフルに至るまでには充分なマージンを確保することができる。したがって、新たな欠陥発生に対してそれ以上の保存ができなくなってしまうまでの記憶容量のゆとりがある。あるいは、最も古いNG画像データ(部分的欠陥画像データ)を破棄したうえで最新のNG画像データ(部分的欠陥画像データ)を格納しなければならない状態に至るまでの記憶容量のゆとりがある。したがって、欠陥の発生が多くて時系列的に累積していっても、そのすべてのあるいはほとんど大部分の欠陥有りの部分的欠陥画像データ70を保存しておくことができ、あとでの欠陥原因解析を有利に進めることができる。そして、この利点を発揮させるのに、ことさらに記憶容量を大きくする必要がなくて、コスト面での負担の増大を抑制できる。さらに、部分的欠陥画像データ70をRAM8やEEPROM16などの記憶手段に転送する時間は、1フレーム分全体の画像データを丸ごと転送する場合よりも短くなる。
【0043】そして、あとの欠陥原因解析において、欠陥を示す映像を再生するに際しては、RAM8やEEPROM16などの記憶手段から正常全画像データ200を読み出すとともに、異常(NG)とされた部分的欠陥画像データ70を読み出し、付属情報80が示す座標データに基づいて部分的欠陥画像データ70を正常全画像データ200の所定の位置において画像合成して、全体の中で部分の欠陥を含んだ状態の合成画像データ300を生成して、それをモニタ12に表示するので、欠陥のある画像データの再現性を良好なものにすることができ、欠陥原因等をチェックするうえで不都合は生じない。
【0044】以上、一つの実施の形態について説明してきたが、本発明は次のように構成したものも含み得るものとする。
【0045】(1)重要と考えられる変形の実施の形態として、異常(NG)とされた部分的欠陥画像データ70とそれに関連する付属情報80との複合データ90を保存するデバイスとして、画像処理装置1に内蔵し、バス10に接続した図1で二点鎖線で示すEEPROM16とするのが好ましい。EEPROM16は不揮発性メモリであり、長期間の記憶が可能である。また、電気的にデータ消去することも可能であり、非常に好都合である。
【0046】(2)上記の(1)の変形として、EEPROMを入出力インターフェイス9を介して外部に接続するのでもよい。
【0047】(3)複合データ90を保存する箇所として、RAM8やEEPROM16などの記憶手段以外のものとして、外部記憶装置15を利用するように構成してもよい。その外部記憶装置15としては、例えば、ハードディスクドライブなどの磁気記録デバイス、MO(Magneto Optics)ディスクドライブやDVD‐RAMドライブなどの光磁気記録デバイス、フラッシュメモリ、EEPROMその他の不揮発性メモリなどの半導体記憶デバイスなどがあり、さらにはVTR(ビデオテープレコーダ)などでもよいものとする。
【0048】(4)フレームメモリ5に代えてフィールドメモリでもよいし、その他のメモリでもよい。
【0049】(5)フレームメモリ5をシステムメモリとしてのRAM8と共用することも可能である。
【0050】(6)計測対象物30が所定の検査ポイントDPに到達したことを検出する到達検出手段については、上記の実施の形態の光電センサ22に代えて、超音波センサ、圧電センサ、リミットスイッチなど何であってもよい。あるいは、CCDカメラ2で撮像して得られた画像データの画像処理に基づいて、すなわち画像データに対して到達検出用のサーチウインドウを設定して、ソフトウェア的に到達検出を判定するように構成してもよい。
【0051】(7)計測対象物30としては何も複数の部品40を載置したトレイ30に限る必要はなく、また、検査対象としては何も部品40の位置ずれや形状相違などに限る必要はなく、画像処理による検査が可能なものであれば、どのようなものを検査対象としてもよい。半製品または製品に貼り付けられ、あるいは印刷されているラベルの面積の判定でもよいし、半製品または製品そのもののサイズの判定など何であってもよい。
【0052】(8)カメラ・表示コントローラ4は、フレームメモリ5への画像データの書き込みと並行して、その書き込んだ画像データをフレームメモリ5から読み出し、D/A変換器11に転送し、モニタ12に映像をリアルタイムで表示したが、このようなリアルタイムの表示はしなくてもよい。つまり、モニタ12を異常判定のときだけリアルタイムに表示動作させるようにしてもよいし、あるいはそれもなくして、異常の原因究明のときにだけ用いるようにすることも可能である。
【0053】(9)欠陥有りのときの部分的欠陥画像データ70等の保存に際しては、画像データを圧縮してから保存するように構成してもよい。この場合、表示に際しては画像伸張して表示するものとする。
【0054】(10)モデムカードやISDNカードを利用して公衆回線あるいは専用回線を介して画像データ等を遠隔の端末に送出するように構成してもよい。
【0055】(11)上記の実施の形態では、欠陥のある検査対象の画像データについて部分的欠陥画像データ70に付属情報80を関連付けて複合データ90となし、これを保存するようにしたが、これとともに、正常とされるOK画像データについても同様に、付属情報を関連付けて複合データとなして保存するように構成してもよい。
【0056】(12)その他本発明の要旨と直接に関係しない任意の事項については、公知の任意のものが適用可能であり、また、公知以外のものであっても、本発明の要旨を逸脱しない範囲において適用可能であることはいうまでもない。
【0057】上記の(1)〜(12)は互いに独立した事項であり、これらのうち任意の事項を任意数適当に組み合わせてもよきものとする。
【0058】
【発明の効果】画像処理装置についての請求項1の発明によれば、欠陥のある検査対象の画像情報の保存件数を増やすことができるとともに、記憶エリアに対する部分的欠陥画像データの転送を短時間に行うことができ、さらに保存するのが一部分を切り出した部分的欠陥画像データであっても、全領域での占める位置を示す付属情報を併せて保存するから、欠陥有りの検査対象の映像の再現およびチェックは良好に行うことができる。また、請求項2の発明によっても、上記請求項1と同様の効果が得られる。
【0059】請求項3の発明によれば、上記請求項1の効果に加えて、再生に際して、正規の位置関係で部分的欠陥画像データを正常全画像データに画像合成したうえで再生させるので、意義ある情報を欠損することなく、良好で精度の高い再現性を確保することができ、欠陥原因等をチェックするうえで好都合となる。また、請求項4の発明によっても、上記請求項3と同様の効果が得られる。
【0060】請求項5の発明によれば、生産ライン等で搬送される検査対象について、検査対象をタイミング良く撮像し、効率良く検査することができ、また、上記と同様の効果が得られる。
【0061】請求項6の発明によれば、位置ずれまたは品種違いの判定において、本発明を好適に実施することが可能となる。
【図面の簡単な説明】
【図1】 本発明の実施の形態の画像処理装置の電気的構成を示すブロック図
【図2】 実施の形態の画像処理装置を適用する生産ライン検査システムの概要の説明図
【図3】 実施の形態の生産ライン検査システムで搬送されるトレイとそれに載置されている複数の部品とを示す概略の平面図
【図4】 実施の形態の画像処理装置によるパターンマッチングの動作説明図
【図5】 実施の形態の画像処理装置によるパターンマッチングで欠陥有りすなわち位置ずれ有りと判定される場合の動作説明図
【図6】 実施の形態の画像処理装置によるパターンマッチングで欠陥有りすなわち形状相違と判定される場合の動作説明図
【図7】 欠陥有りとされる部品画像が複数ある場合のパターンマッチングの動作説明図
【図8】 実施の形態の画像処理装置のパターンマッチングの際の動作を示す概略のフローチャート
【図9】 実施の形態の画像処理装置においてその記憶手段に格納されている正常全画像データのフォーマット
【図10】 実施の形態の画像処理装置における正常全画像データと部分的欠陥画像データとの画像合成の動作説明図
【図11】 実施の形態の画像処理装置における欠陥原因解析の際の動作を示す概略のフローチャート
【符号の説明】
1…画像処理装置、2…CCDカメラ、3…A/D変換器、4…カメラ・表示コントローラ、5…フレームメモリ、6…CPU、7…ROM、8…RAM、9…入出力インターフェイス、10…バス、11…D/A変換器、12…モニタ、13…入力操作部、14…警報器、15…外部記憶装置、16…EEPROM、20…生産ライン検査システム、21…搬送手段、22…到達検出手段(光電センサ)、23…ケーブル、30…計測対象物(トレイ)、31…載置面、32…立ち上がり壁、40…部品、50…トレイ画像、51…載置面画像、52…立ち上がり壁画像、60…部品画像、70…部分的欠陥画像データ、80…付属情報、90…複合データ、100…取り込み画像データ全領域、200…正常全画像データ、300…合成画像データ、DP…検査ポイント、DS…計測サーチ領域、DT…計測対象基準画像検出領域、X…搬送方向
【0001】
【発明の属する技術分野】本発明は、欠陥検査用の画像処理装置、特に生産ライン検査システムに装備されて生産される半製品または製品の欠陥(例えば位置ずれなど)を検出するための画像処理装置にかかわり、詳しくは欠陥のある検査対象の画像データの保存の件数を増やすための技術に関する。
【0002】
【従来の技術】従来より、検査対象をCCDカメラ等によって撮像して画像データを取得し、その画像データを画像処理して判定基準と比較することにより欠陥の有無を判定し、欠陥と判定したときにその欠陥のある検査対象についての画像データを外部記憶装置に保存するように構成された画像処理装置が知られている。このような欠陥のある画像データを「NG画像データ」という。NGは「No Good」のことである。
【0003】欠陥有りと判定したときは、一般的には警報または警告を発することが行われる。そのとき直ちに生産ラインを停止するか、それともある程度時間をおいて様子を見てから停止するか、あるいは定刻に停止するかはともかくとして、欠陥有りのときには、歩留まりの低下を抑制するため、その欠陥が何で、どこでどのような原因によって欠陥が発生したのかの欠陥状況を見きわめる必要がある。その場合に、欠陥有り判定時に保存しておいた画像データを再生して表示し、検査要員等がその欠陥のある検査対象の映像を見て、欠陥状況を判断する。そして、その判断の結果に基づいて、該当する原因を見いだし、補修や部品交換などのメンテナンスを行う。
【0004】
【発明が解決しようとする課題】上記した従来の技術には次のような問題点がある。欠陥有り判定時に保存するのは欠陥のある検査対象の画像データ(NG画像データ)の全体についてである。すなわち、画像処理に際してCCDカメラ等より取り込んだ1フレーム分の画像データをフレームメモリに格納するが、欠陥有りと判定したときは、その1フレーム分全体の画像データを丸ごと保存するようにしている。
【0005】しかし、このような欠陥のあるNG画像データを保存しておく記憶エリアの記憶容量にはおのずと一定の限界がある。その記憶エリアの記憶容量として、複数フレーム分を確保しているが、規定フレーム分のNG画像データの格納がなされてしまうと、メモリフルの状態になる。このメモリフルの状態は、特に、欠陥が連続して発生する場合、あるいは間欠的ではあっても頻繁に発生する場合に陥る。このような場合、ソフトウェアによって異なるが、それ以上のNG画像データの保存を禁止する手法があり、また、最も古いNG画像データを破棄したうえで最新のNG画像データを格納するという手法もある。前者の場合には、最新の欠陥についてのNG画像データが得られないという不都合がある。後者の場合には、最も古い欠陥についてのNG画像データが得られなくなって、欠陥原因解析において根本原因が突き止めにくくなるおそれがある。いずれにしても、記憶エリアの記憶容量に限界があるので、欠陥有りのときに1フレーム分全体の画像データを丸ごと保存することが大きな原因となっている。
【0006】記憶容量を大きくすれば、対応ができるマージンが増大するが、それではコストアップは避けられない。
【0007】また、欠陥のある1フレーム分全体の画像データをフレームメモリから読み出して該当の記憶エリアに転送するのには、比較的多くの時間がかかるという問題もある。
【0008】本発明は上記した課題の解決を図るべく創作したものであって、欠陥のある検査対象の画像情報の保存の件数を増やすことのできる画像処理装置を提供することを目的としている。
【0009】
【課題を解決するための手段】上記した課題の解決を図ろうとする本発明にかかわる請求項1の画像処理装置は、次のように構成してある。すなわち、撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの一部分の画像データである部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存するように構成してあることを特徴としている。この構成によると、次のような作用がある。すなわち、欠陥有りと判定したときに、従来技術のように1枚分(1フレーム分)全体の画像データを丸ごと保存するのではなく、その欠陥を含んでいる一部分の画像データである部分的欠陥画像データのみを選択的に切り出して保存するので、限られた記憶容量の記憶エリアに対する欠陥のある検査対象の画像情報の保存の件数を増やすことが可能となる。さらに、部分的欠陥画像データを記憶エリアに転送する時間は、1枚分全体の画像データを転送する場合よりも短くなる。また、保存するのが一部分を切り出した部分的欠陥画像データであっても、取り込み画像データ全領域でその部分的欠陥画像データが占める座標を示す付属情報を併せて保存するから、部分的欠陥画像データを再現したりチェックしたりするうえで不都合は生じない。
【0010】本発明にかかわる請求項2の画像処理装置は、次のような構成となっている。すなわち、検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段とを備えていることを特徴としている。この構成は、請求項1の構成をより具体的に記述するものであって、請求項1と同様の作用を発揮する。
【0011】本発明にかかわる請求項3の画像処理装置は、次のような構成となっている。すなわち、撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存し、再生に際してあらかじめ登録しておいた正常全画像データに対して前記部分的欠陥画像データを前記付属情報に基づいて位置合わせして画像合成するように構成してあることを特徴としている。この構成によると、次のような作用がある。すなわち、請求項1と同様に、限られた記憶容量の記憶エリアに対する欠陥のある検査対象の画像情報の保存の件数を増やせるとともに、記憶エリアに対する部分的欠陥画像データの転送が短時間に行え、さらに、保存するのは部分的欠陥画像データであっても、再生に際しては正常全画像データと画像合成した合成画像データとして再現することが可能であり、その画像合成は取り込み画像データ全領域に占める部分的欠陥画像データの座標を示す付属情報に基づいて行われるので、正確な合成画像データを生成することができ、欠陥のある画像データの再現性を良好なものにすることができて、欠陥原因等をチェックするうえで不都合は生じない。
【0012】本発明にかかわる請求項4の画像処理装置は、次のような構成となっている。すなわち、検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段と、あらかじめ正常全画像データを登録しておく手段と、再生に際して前記正常全画像データと前記部分的欠陥画像データと前記付属情報とを読み出し前記付属情報に基づいて前記部分的欠陥画像データを前記正常全画像データに対して位置合わせして画像合成する手段と、その画像合成で得られた合成画像データを読み出して表示用の映像信号に変換する手段とを備えていることを特徴としている。この構成は、請求項3の構成をより具体的に記述するものであって、請求項3と同様の作用を発揮する。
【0013】本発明にかかわる請求項5の画像処理装置は、上記請求項1〜4において、前記検査対象が搬送されるものであり、その搬送経路の所要の検査ポイントに前記検査対象が到達したことを検出する到達検出手段を備えており、この到達検出手段による検出信号をトリガとして前記検査対象の撮像および欠陥判定を行うように構成してあることを特徴としている。この構成によると、検査対象が搬送されるものであっても、その検査対象をタイミング良く撮像して、上記の作用を得ることが可能となる。
【0014】本発明にかかわる請求項6の画像処理装置は、上記請求項1〜5において、前記検査対象における検査項目が取り込み画像データに含まれる複数の部分画像の位置ずれまたは品種違いとされていることを特徴としている。本発明は、位置ずれや品種違いの判定に有効な機能を発揮する。
【0015】
【発明の実施の形態】以下、本発明にかかわる画像処理装置の実施の形態を図面に基づいて詳細に説明する。
【0016】図1は実施の形態の画像処理装置の電気的構成を示すブロック図である。図1において、符号の1は当該の画像処理装置、2は撮影レンズや絞りなどを含む光学系および固体撮像手段の代表例であるCCD(電荷結合デバイス)などからなるCCDカメラであり、このCCDカメラ2は、撮影レンズによってCCD上に光学像を結像し、結像された光学像をCCDで光電変換して電気信号として出力するものである。3はCCDカメラ2からのアナログの映像信号(CCD出力信号)をディジタル化して画像データに変換するA/D変換器、4はCCDカメラ2、A/D変換器3およびフレームメモリ5に対してタイミング信号を出力して画像データの取得のタイミング制御を行うとともに、フレームメモリ5およびD/A変換器11に対してタイミング信号を出力して取得の映像信号の表示のタイミング制御を行うカメラ・表示コントローラ、5は画像データ一時記憶手段の一例としてのフレームメモリ、6はシステム全体の制御を司る制御手段の一例としてのCPU(中央演算処理装置)、7はCPU6による演算・制御等のためのプログラムを格納しているROM(リードオンリーメモリ)、8はCPU6の演算・制御等を補助するとともにデータを格納するRAM(ランダムアクセスメモリ)、9は外部との間でデータや制御信号の入出力を行う入出力インターフェイス、10はCPU6、ROM7、RAM8、カメラ・表示コントローラ4、フレームメモリ6および入出力インターフェイス9を接続するバス、11はフレームメモリ5からカメラ・表示コントローラ4を介しての画像データをアナログの映像信号に変換するD/A変換器、12は画像処理装置1に図示しないインターフェイスおよびケーブルを介して接続されているCRT(陰極線管)や液晶ディスプレイ(LCD)などのモニタである。フレームメモリ5は、少なくとも1フレーム分以上の画像データを蓄積できる画像メモリであって、VRAM、SRAM、DRAMなどが一般的に使用されるが、ここではバス10とは独立動作可能なVRAMを使用しているものとする。なお、カメラ・表示コントローラ4とフレームメモリ5とはパラレルなバスラインを介して接続されている。また、入出力インターフェイス9には、RAM8に必要な初期値、判定基準等のためのパラメータ、しきい値、その他の条件、必要なデータなどを設定入力したり、必要な指示を与えたりするためのワイヤードリモコンなどの入力操作部13や画像処理装置1の内部の状況や判断結果などをオペレータや検査要員等に知らせるための警報器14やインジケータをそれぞれ個別のケーブルを介して接続することが可能となっている。なお、ワイヤードリモコンに代えてワイヤレスリモコンを用いることも可能とし、この場合は、リモコン受信機の出力端子を入出力インターフェイス9に接続するものとする。警報器14としては、LED(発光ダイオード)、蛍光表示管その他任意の発光素子、灯器、あるいはブザーなどの鳴動器が適用可能とする。さらに、入出力インターフェイス9には、必要な外部記憶装置15を接続することができるものとする。その外部記憶装置15としては、ハードディスクドライブなどの磁気記録デバイス、MO(Magneto Optics)ディスクドライブやDVD(Digital Versatile Disk)‐RAMドライブなどの光磁気記録デバイス、フラッシュメモリ、EEPROMその他の不揮発性メモリなどの半導体記憶デバイスなどがあり、さらにはVTR(ビデオテープレコーダ)などでもよいものとする。
【0017】図2は上記構成の画像処理装置1を適用する生産ライン検査システム20の概要を示す。図2において、符号の21は計測対象物30を搬送するコンベヤなどの搬送手段、22は搬送手段21の近傍で搬送されていく計測対象物30の到達を検出するための到達検出手段の一例としての光電センサであり、検査ポイントDPに配置されている。光電センサ22はケーブル23を介して画像処理装置1の入出力インターフェイス9に接続されている。なお、説明の便宜上、図2においては、CCDカメラ2を画像処理装置1の外側に出して描いているが、実際には、CCDカメラ2は画像処理装置1と一体となっている。もっとも、CCDカメラ2を画像処理装置1とは別体構成とし、両者をケーブルで接続した態様としてもよい。Xは搬送手段21による搬送方向を示す。
【0018】図2においては、計測対象物30として、複数の部品40を所定間隔をおいて所定位置に載置したトレイが示されている。図3はトレイ30とそれに載置されている複数の部品40とを示す概略の平面図である。符号の31はトレイ30の底部をなす載置面、32はトレイ30の周囲の立ち上がり壁である。この例では、部品40を6個載置するようにしている。もっとも、このような数値は単なる例示にすぎず、仕様に応じて適宜に変更してよいことはいうまでもない。CCDカメラ2は、搬送手段21によって搬送されていくトレイ30および部品40をその真上から撮像するように、搬送手段21の直上に配置されている。なお、後に説明するが、計測対象物30としては、何も部品を載置したトレイに限る必要はなく、画像処理による検査が可能なものであれば、どのようなものを検査対象としてもよいことを付記しておく。ここでのトレイ30は一例にすぎない。
【0019】次に、上記のように構成された実施の形態の場合の生産ライン検査システム20に適用された画像処理装置1の動作を説明する。
【0020】駆動されている搬送手段21によって複数の計測対象物(トレイ)30が所定の間隔を隔てて連続的に搬送されていく。計測対象物30は、検査ポイントDPの少し上手側において、図示しないアライメント装置により、搬送手段21上における位置決めが行われているものとする。検査ポイントDPに達した計測対象物(トレイ)30があると、その検査ポイントDPに設置されている到達検出手段22が動作する。到達検出手段22が光電センサの場合は、次のような動作となる。光電センサ22は、レーザーダイオードなどの発光素子とフォトダイオードなどの受光素子からなり、発光素子から出射したレーザービームなどが計測対象物30に当たって反射し、その反射光を受光素子で捕捉し、電気信号に変換し増幅することにより到達検出を行う。
【0021】計測対象物30が検査ポイントDPに到達したことを到達検出手段22が検出すると、到達検出手段22はその検出信号をトリガ信号として画像処理装置1に送出する。画像処理装置1においては、その入出力インターフェイス9を介して入力されてきたトリガ信号がバス10を介してCPU6に与えられる。CPU6はトリガ信号を入力すると、カメラ・表示コントローラ4に起動信号を出力する。カメラ・表示コントローラ4は起動信号を入力すると、CCDカメラ2、A/D変換器3、フレームメモリ5およびD/A変換器11に対してタイミング信号を出力する。
【0022】CCDカメラ2におけるCCDはタイミング信号を入力すると、その電子シャッタを開き作動させ、被写体である計測対象物30を撮像する。すなわち、計測対象物30の光学像が撮像レンズを介してCCDの表面に結像し、CCDはその光学像を信号電荷として蓄積しているが、タイミング信号を入力すると、感光部のフォトダイオードから垂直転送CCDへの転送および垂直転送CCDから水平転送CCDへの転送を行い、出力アンプを介して映像信号として出力する。A/D変換器3はタイミング信号の入力によって起動し、CCDカメラ2から入力したアナログの映像信号(CCD出力信号)をディジタルの画像データに変換する。このA/D変換器3のビット数を例えば8ビットとすると、画像データは256階調となる。フレームメモリ5はタイミング信号を入力し、A/D変換器3と同期をとった状態でA/D変換器3からの1フレーム分の画像データを格納する。なお、8ビットについては、一例にすぎなくて、仕様に応じて適宜に変更してよいことはいうまでもない。
【0023】カメラ・表示コントローラ4は、フレームメモリ5への画像データの書き込みと並行して、その書き込んだ画像データをフレームメモリ5から読み出し、D/A変換器11に転送する。D/A変換器11は、転送されてきた画像データをアナログの映像信号に変換し、モニタ12に出力する。なお、モニタ12に至る映像信号は、図示しない所要のビデオエンコーダなどによりNTSC方式などモニタ12に適合した所要のフォーマットに変換されているものとする。このようにして、計測対象物30の到達を検出した時点から、その計測対象物30を被写体像とする映像をモニタ12にリアルタイムに映出する。
【0024】カメラ・表示コントローラ4は1フレーム分の画像データのフレームメモリ5に対する書き込みが完了すると、その書き込み完了信号をCPU6に出力する。その書き込み完了信号を入力したCPU6は、ROM7から読み出したプログラムおよびRAM8から読み出した画像処理演算用条件に従って、フレームメモリ5をアクセスし、フレームメモリ5に格納されている1フレーム分全体の画像データを読み出す。そして、1画素単位または複数画素の集合であるブロック単位で所要の画像処理のための演算を実行し、判定のための演算結果をRAM8にストアする。次に、その演算結果とRAM8から読み出した判定基準との比較を行い、演算結果が正常であるか否かを判定する。
【0025】RAM8には、あらかじめ入力操作部13から入出力インターフェイス9およびバス10を介して画像処理演算用条件や判定基準が設定登録されている。画像処理演算用条件としては、部品40を識別するための濃度値についてのしきい値や部品40の載置位置の良否を判定するためのしきい値(上限値と下限値)や部品40のサイズ、形状などの種別を判定するためなどの判定基準がある。
【0026】トレイ30上の複数の部品40の載置状態の良否判定の場合は、具体的に次のようになる。図4はパターンマッチングの動作説明図である。図4において、符号の50は図3に示す計測対象物すなわちトレイ30についての画像データであるトレイ画像、51は載置面31についての画像データである載置面画像、52は立ち上がり壁32についての画像データである立ち上がり壁画像、60は部品40についての画像データである部品画像、100は取り込み画像データ全領域である。図4に示すように、CCDカメラ2によって撮像され、フレームメモリ5に格納されている取り込み画像データ全領域100において、正規の部品画像60の位置に対応してあらかじめ設定されている破線矩形で図示した計測サーチ領域DSを高速サーチして部品画像60らしきものを見いだし、RAM8から読み出した部品形状に相当するテンプレート画像データと画素比較することのパターンマッチングに基づいて、二点鎖線矩形で図示した計測対象基準画像検出領域DTを抽出し、その計測対象基準画像検出領域DTでの両者の画像データの一致度を算出し、その一致度が所定のしきい値以上となっているか否かを判断し、しきい値以上となっているときは欠陥無しすなわち部品画像60についての位置ずれ無しと判定し、しきい値未満のときは欠陥有りすなわち部品画像60についての位置ずれ有りと判定する。また、一致度が所定値以下(この所定値は前記のしきい値よりかなり低く設定されている)のときは、部品が存在していないものと判定する。図4の場合は、すべての部品画像60がトレイ画像50に対して適正な位置にあると判断される。すなわち、トレイ30において複数の部品40がすべて適正な位置関係で載置されていることになる。
【0027】図5の場合は、取り込み画像データ全領域100において、1つの例えば左下の部品画像60が正規の位置よりも判定基準以上にずれている。すなわち、計測対象基準画像検出領域DTが判定基準以上にずれていて一致度がしきい値未満となっており、欠陥有りと判定されることになる。この場合は、その判定基準以上にずれている1つの部品画像60について計測サーチ領域DSでの画像データの切り出しを行い、それを欠陥のある部分的欠陥画像データ70として保存する。つまり、欠陥のある画像データの保存に際して、従来の技術の場合のように取り込み画像データ全領域100の丸ごとを対象とするのではなく、欠陥のある1つの部品画像60の計測サーチ領域DSに相当する部分的欠陥画像データ70のみを切り出して保存するのである。この場合に、その切り出した部分的欠陥画像データ70の座標データを付属情報80として部分的欠陥画像データ70に関連付けて保存する。
【0028】付属情報80である座標データとしては、各計測サーチ領域DSの左上角部のX座標とY座標の組み合わせでよく、それぞれ、(X1 ,Y1 ),(X1 ,Y2),(X1 ,Y3 ),(X2 ,Y1 ),(X2 ,Y2 ),(X2 ,Y3 )で表される。なお、このような各計測サーチ領域DSについての座標データはあらかじめRAM8に設定登録されているものとする。
【0029】図5の場合には、付属情報80の座標データとしては、(X1 ,Y3 )が選択される。CPU6は、欠陥有りと判定した部品画像60についての部分的欠陥画像データ70と対応する座標データである付属情報80とを関連付けて複合データ90となし、この複合データ90をバス10を介してRAM8に転送格納する。
【0030】なお、ここでは、RAM8は充分に大きな記憶容量をもっているものとし、かつ、電源をオフしても記憶内容が消えないように、RAM8に対してバックアップを行っているものとする。そのバックアップは、例えばリチウム電池でもよいし、大容量のキャパシタでもよい。なお、RAM8に代えて、図1でバス10に接続した二点鎖線で示すEEPROM16に複合データ90を保存するようにしてもよい。むしろ、その方が良い。以下では、「RAM8やEEPROM16などの記憶手段」と記述することとする。
【0031】図6の場合は、取り込み画像データ全領域100において、1つの例えば右側中央の部品画像60が正規の形状とは相違している。この場合も、一致度がしきい値未満となっていて欠陥有りと判定されることになり、その欠陥の1つの部品画像60について計測サーチ領域DSでの画像データの切り出しを行い、その欠陥のある部分的欠陥画像データ70と対応する座標データを付属情報80として関連付け、複合データ90としてRAM8やEEPROM16などの記憶手段に保存する。図6の場合の付属情報80の座標データとしては、右側中央の計測サーチ領域DSに対応した座標データ(X2 ,Y2 )が付属情報80として選択される。
【0032】なお、部品画像60の面積すなわち画素数が正規と異なる場合も同様の処理が行われる。欠陥有りと判定される部品画像60が複数生じる場合もある。そのような一例を図7に示しておく。この場合は、欠陥のあるそれぞれの部分的欠陥画像データ70とそれぞれに対応する座標データを付属情報80として関連付け、複合データ90としてRAM8やEEPROM16などの記憶手段に保存することになる。
【0033】なお、以上のようなパターンマッチングによる画像処理の結果は、カメラ・表示コントローラ4およびD/A変換器11を介してモニタ12に表示される。また、CPU6は、1つでも欠陥を判定したときは、警告信号を出力する。その警告信号はバス10および入出力インターフェイス9を介して外部に接続の警報器14に送出され、その警報器14を動作させることにより、オペレータに対してリアルタイムに異常(NG)が発生したことを知らせる。
【0034】以上のCPU6による動作の概要を図8のフローチャートに示しておく。なお、警告信号の出力はステップS7の直後であってもよい。
【0035】次に、欠陥原因の解析の作業の場合の動作について説明する。
【0036】図9に示すように、RAM8やEEPROM16などの記憶手段には取り込み画像データ全領域100の正常な全画像データ200が格納されているものとする。この正常全画像データ200のRAM8やEEPROM16などの記憶手段への格納については、トレイ30および複数の部品40の組み合わせ仕様に応じてあらかじめ求めたものを外部記憶装置15に格納しておき、必要に応じて選択して外部記憶装置15から入出力インターフェイス9およびバス10を介してRAM8やEEPROM16などの記憶手段に転送格納するのである。また、CCDカメラ2から取り込んでフレームメモリ5に格納した取り込み画像データ全領域100について正常と判断したときに、それを正常全画像データ200としてRAM8やEEPROM16などの記憶手段に転送格納するのでもよい。あるいは、必ずしもRAM8やEEPROM16などの記憶手段に格納しておく必要はなく、外部記憶装置15に転送格納しておくのでもよい。
【0037】オペレータまたは別の検査要員やメンテナンス要員が欠陥原因解析を行うときに、入力操作部13からの所要の操作を行うと、CPU6は、正常全画像データ200を読み出し、次いで、異常(NG)とされた部品画像60についての複合データ90すなわち部分的欠陥画像データ70とそれに関連する付属情報80とを読み出す。付属情報80は、その部分的欠陥画像データ70が正常全画像データ200においてどの位置を占めるかについての座標データである。CPU6は、その座標データに基づいて部分的欠陥画像データ70を正常全画像データ200に対して上書き式に画像合成し、合成画像データ300を生成する。図10は、その画像合成の様子を示す。そして、その合成画像データ300をフレームメモリ5に転送格納し、カメラ・表示コントローラ4およびD/A変換器11を介して合成画像データ300をモニタ12に送出し、モニタ12において合成画像データ300の映像を映出する。
【0038】検査要員等は、その合成画像データ300の映像の表示を見ることにより、欠陥の原因を究明する。必要に応じて、入力操作部13からの操作により、モニタ12に映出されフレームメモリ5に格納されている合成画像データ300について再度の画像処理を行うことも可能である。この場合に、合成画像データ300の全体について欠陥の有無の判定を行う画像処理を実施してもよいし、あらかじめ分かっている欠陥のある部分的欠陥画像データ70の領域においてのみ画像処理を実施してもよい。後者の場合は、欠陥のある部分的欠陥画像データ70を指定するに際して、それに関連している付属情報80の座標データに基づいて指定する。これによって、欠陥発生状況を再現することができる。
【0039】以上のCPU6による動作の概要を図11のフローチャートに示しておく。
【0040】なお、異常(NG)とされた部分的欠陥画像データ70とそれに関連する付属情報80との複合データ90をRAM8やEEPROM16などの記憶手段に保存するに際して、必ずしも同一記憶エリアに保存することは必須の要件ではない。欠陥有りの部分的欠陥画像データ70と付属情報80とをRAM8やEEPROM16などの記憶手段の保存エリアの別の領域に分けて保存し、両者を関係付けるデータ、すなわち当該の部分的欠陥画像データ70を格納するアドレスと当該の付属情報80を格納するアドレスとを関係付けたデータをさらに保存すればよいのである。
【0041】なお、RAM8やEEPROM16などの記憶手段として大容量のものを採用し、多数の欠陥有りの部分的欠陥画像データおよびそれに関連する付属情報をまとめて、すなわちデータベース化して保存しておくようにすれば、異常の発生原因や発生箇所などについての解析を統計的に行う上で有利となる。検査要員や解析要員は、欠陥の発生がいつから始まっていつまで続いたか、欠陥が量的にどのように変化していったかを解析する。
【0042】以上のように、本実施の形態の画像処理装置においては、トレイ画像50において複数の部品画像60のうち1つでも欠陥有り(位置ずれや形状異常など有り)と判定したとは、従来技術のように1フレーム分全体の画像データを丸ごと保存するのではなく、その欠陥を含んでいる部分的欠陥画像データ70のみを選択的に切り出して保存するので、記憶容量が限られているRAM8やEEPROM16などの記憶手段においても、そのような部分的欠陥画像データ70の保存件数を増やすことができる。すなわち、メモリフルになるまでの保存件数が従来技術に比べて大幅に増加する。部分的欠陥画像データ70とともに座標データを付属情報80として保存するが、付属情報80の容量は少ないものですむ。6つの部品画像60のうち1つだけ欠陥があるときには、図5や図6から推測できるように使用する記憶容量は従来技術の場合の6分の1以下となることは明らかである。特に、欠陥が連続して発生した場合であっても、あるいは間欠的ではあっても頻繁に発生する場合であっても、メモリフルに至るまでには充分なマージンを確保することができる。したがって、新たな欠陥発生に対してそれ以上の保存ができなくなってしまうまでの記憶容量のゆとりがある。あるいは、最も古いNG画像データ(部分的欠陥画像データ)を破棄したうえで最新のNG画像データ(部分的欠陥画像データ)を格納しなければならない状態に至るまでの記憶容量のゆとりがある。したがって、欠陥の発生が多くて時系列的に累積していっても、そのすべてのあるいはほとんど大部分の欠陥有りの部分的欠陥画像データ70を保存しておくことができ、あとでの欠陥原因解析を有利に進めることができる。そして、この利点を発揮させるのに、ことさらに記憶容量を大きくする必要がなくて、コスト面での負担の増大を抑制できる。さらに、部分的欠陥画像データ70をRAM8やEEPROM16などの記憶手段に転送する時間は、1フレーム分全体の画像データを丸ごと転送する場合よりも短くなる。
【0043】そして、あとの欠陥原因解析において、欠陥を示す映像を再生するに際しては、RAM8やEEPROM16などの記憶手段から正常全画像データ200を読み出すとともに、異常(NG)とされた部分的欠陥画像データ70を読み出し、付属情報80が示す座標データに基づいて部分的欠陥画像データ70を正常全画像データ200の所定の位置において画像合成して、全体の中で部分の欠陥を含んだ状態の合成画像データ300を生成して、それをモニタ12に表示するので、欠陥のある画像データの再現性を良好なものにすることができ、欠陥原因等をチェックするうえで不都合は生じない。
【0044】以上、一つの実施の形態について説明してきたが、本発明は次のように構成したものも含み得るものとする。
【0045】(1)重要と考えられる変形の実施の形態として、異常(NG)とされた部分的欠陥画像データ70とそれに関連する付属情報80との複合データ90を保存するデバイスとして、画像処理装置1に内蔵し、バス10に接続した図1で二点鎖線で示すEEPROM16とするのが好ましい。EEPROM16は不揮発性メモリであり、長期間の記憶が可能である。また、電気的にデータ消去することも可能であり、非常に好都合である。
【0046】(2)上記の(1)の変形として、EEPROMを入出力インターフェイス9を介して外部に接続するのでもよい。
【0047】(3)複合データ90を保存する箇所として、RAM8やEEPROM16などの記憶手段以外のものとして、外部記憶装置15を利用するように構成してもよい。その外部記憶装置15としては、例えば、ハードディスクドライブなどの磁気記録デバイス、MO(Magneto Optics)ディスクドライブやDVD‐RAMドライブなどの光磁気記録デバイス、フラッシュメモリ、EEPROMその他の不揮発性メモリなどの半導体記憶デバイスなどがあり、さらにはVTR(ビデオテープレコーダ)などでもよいものとする。
【0048】(4)フレームメモリ5に代えてフィールドメモリでもよいし、その他のメモリでもよい。
【0049】(5)フレームメモリ5をシステムメモリとしてのRAM8と共用することも可能である。
【0050】(6)計測対象物30が所定の検査ポイントDPに到達したことを検出する到達検出手段については、上記の実施の形態の光電センサ22に代えて、超音波センサ、圧電センサ、リミットスイッチなど何であってもよい。あるいは、CCDカメラ2で撮像して得られた画像データの画像処理に基づいて、すなわち画像データに対して到達検出用のサーチウインドウを設定して、ソフトウェア的に到達検出を判定するように構成してもよい。
【0051】(7)計測対象物30としては何も複数の部品40を載置したトレイ30に限る必要はなく、また、検査対象としては何も部品40の位置ずれや形状相違などに限る必要はなく、画像処理による検査が可能なものであれば、どのようなものを検査対象としてもよい。半製品または製品に貼り付けられ、あるいは印刷されているラベルの面積の判定でもよいし、半製品または製品そのもののサイズの判定など何であってもよい。
【0052】(8)カメラ・表示コントローラ4は、フレームメモリ5への画像データの書き込みと並行して、その書き込んだ画像データをフレームメモリ5から読み出し、D/A変換器11に転送し、モニタ12に映像をリアルタイムで表示したが、このようなリアルタイムの表示はしなくてもよい。つまり、モニタ12を異常判定のときだけリアルタイムに表示動作させるようにしてもよいし、あるいはそれもなくして、異常の原因究明のときにだけ用いるようにすることも可能である。
【0053】(9)欠陥有りのときの部分的欠陥画像データ70等の保存に際しては、画像データを圧縮してから保存するように構成してもよい。この場合、表示に際しては画像伸張して表示するものとする。
【0054】(10)モデムカードやISDNカードを利用して公衆回線あるいは専用回線を介して画像データ等を遠隔の端末に送出するように構成してもよい。
【0055】(11)上記の実施の形態では、欠陥のある検査対象の画像データについて部分的欠陥画像データ70に付属情報80を関連付けて複合データ90となし、これを保存するようにしたが、これとともに、正常とされるOK画像データについても同様に、付属情報を関連付けて複合データとなして保存するように構成してもよい。
【0056】(12)その他本発明の要旨と直接に関係しない任意の事項については、公知の任意のものが適用可能であり、また、公知以外のものであっても、本発明の要旨を逸脱しない範囲において適用可能であることはいうまでもない。
【0057】上記の(1)〜(12)は互いに独立した事項であり、これらのうち任意の事項を任意数適当に組み合わせてもよきものとする。
【0058】
【発明の効果】画像処理装置についての請求項1の発明によれば、欠陥のある検査対象の画像情報の保存件数を増やすことができるとともに、記憶エリアに対する部分的欠陥画像データの転送を短時間に行うことができ、さらに保存するのが一部分を切り出した部分的欠陥画像データであっても、全領域での占める位置を示す付属情報を併せて保存するから、欠陥有りの検査対象の映像の再現およびチェックは良好に行うことができる。また、請求項2の発明によっても、上記請求項1と同様の効果が得られる。
【0059】請求項3の発明によれば、上記請求項1の効果に加えて、再生に際して、正規の位置関係で部分的欠陥画像データを正常全画像データに画像合成したうえで再生させるので、意義ある情報を欠損することなく、良好で精度の高い再現性を確保することができ、欠陥原因等をチェックするうえで好都合となる。また、請求項4の発明によっても、上記請求項3と同様の効果が得られる。
【0060】請求項5の発明によれば、生産ライン等で搬送される検査対象について、検査対象をタイミング良く撮像し、効率良く検査することができ、また、上記と同様の効果が得られる。
【0061】請求項6の発明によれば、位置ずれまたは品種違いの判定において、本発明を好適に実施することが可能となる。
【図面の簡単な説明】
【図1】 本発明の実施の形態の画像処理装置の電気的構成を示すブロック図
【図2】 実施の形態の画像処理装置を適用する生産ライン検査システムの概要の説明図
【図3】 実施の形態の生産ライン検査システムで搬送されるトレイとそれに載置されている複数の部品とを示す概略の平面図
【図4】 実施の形態の画像処理装置によるパターンマッチングの動作説明図
【図5】 実施の形態の画像処理装置によるパターンマッチングで欠陥有りすなわち位置ずれ有りと判定される場合の動作説明図
【図6】 実施の形態の画像処理装置によるパターンマッチングで欠陥有りすなわち形状相違と判定される場合の動作説明図
【図7】 欠陥有りとされる部品画像が複数ある場合のパターンマッチングの動作説明図
【図8】 実施の形態の画像処理装置のパターンマッチングの際の動作を示す概略のフローチャート
【図9】 実施の形態の画像処理装置においてその記憶手段に格納されている正常全画像データのフォーマット
【図10】 実施の形態の画像処理装置における正常全画像データと部分的欠陥画像データとの画像合成の動作説明図
【図11】 実施の形態の画像処理装置における欠陥原因解析の際の動作を示す概略のフローチャート
【符号の説明】
1…画像処理装置、2…CCDカメラ、3…A/D変換器、4…カメラ・表示コントローラ、5…フレームメモリ、6…CPU、7…ROM、8…RAM、9…入出力インターフェイス、10…バス、11…D/A変換器、12…モニタ、13…入力操作部、14…警報器、15…外部記憶装置、16…EEPROM、20…生産ライン検査システム、21…搬送手段、22…到達検出手段(光電センサ)、23…ケーブル、30…計測対象物(トレイ)、31…載置面、32…立ち上がり壁、40…部品、50…トレイ画像、51…載置面画像、52…立ち上がり壁画像、60…部品画像、70…部分的欠陥画像データ、80…付属情報、90…複合データ、100…取り込み画像データ全領域、200…正常全画像データ、300…合成画像データ、DP…検査ポイント、DS…計測サーチ領域、DT…計測対象基準画像検出領域、X…搬送方向
【特許請求の範囲】
【請求項1】 撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存するように構成してあることを特徴とする画像処理装置。
【請求項2】 検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段とを備えていることを特徴とする画像処理装置。
【請求項3】 撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存し、再生に際してあらかじめ登録しておいた正常全画像データに対して前記部分的欠陥画像データを前記付属情報に基づいて位置合わせして画像合成するように構成してあることを特徴とする画像処理装置。
【請求項4】 検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段と、あらかじめ正常全画像データを登録しておく手段と、再生に際して前記正常全画像データと前記部分的欠陥画像データと前記付属情報とを読み出し前記付属情報に基づいて前記部分的欠陥画像データを前記正常全画像データに対して位置合わせして画像合成する手段と、その画像合成で得られた合成画像データを読み出して表示用の映像信号に変換する手段とを備えていることを特徴とする画像処理装置。
【請求項5】 前記検査対象が搬送されるものであり、その搬送経路の所要の検査ポイントに前記検査対象が到達したことを検出する到達検出手段を備えており、この到達検出手段による検出信号をトリガとして前記検査対象の撮像および欠陥判定を行うように構成してあることを特徴とする請求項1から請求項4までのいずれかに記載の画像処理装置。
【請求項6】 前記検査対象における検査項目が取り込み画像データに含まれる複数の部分画像の位置ずれまたは品種違いとされていることを特徴とする請求項1から請求項5までのいずれかに記載の画像処理装置。
【請求項1】 撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存するように構成してあることを特徴とする画像処理装置。
【請求項2】 検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段とを備えていることを特徴とする画像処理装置。
【請求項3】 撮像した検査対象の画像データについての画像処理に基づいて欠陥の有無を判定し、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出すとともに、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報とともに前記部分的欠陥画像データを保存し、再生に際してあらかじめ登録しておいた正常全画像データに対して前記部分的欠陥画像データを前記付属情報に基づいて位置合わせして画像合成するように構成してあることを特徴とする画像処理装置。
【請求項4】 検査対象の撮像手段と、撮像で得られる画像データの一時記憶手段と、前記画像データを画像処理し判定基準に従って欠陥の有無を判定する手段と、欠陥有りと判定したときに当該の欠陥有りの部分的欠陥画像データのみを切り出す手段と、取り込み画像データ全領域でのその部分的欠陥画像データが占める座標についての付属情報を生成する手段と、前記部分的欠陥画像データと前記付属情報とを関連付ける手段と、その関連付けられた複合データを保存する手段と、あらかじめ正常全画像データを登録しておく手段と、再生に際して前記正常全画像データと前記部分的欠陥画像データと前記付属情報とを読み出し前記付属情報に基づいて前記部分的欠陥画像データを前記正常全画像データに対して位置合わせして画像合成する手段と、その画像合成で得られた合成画像データを読み出して表示用の映像信号に変換する手段とを備えていることを特徴とする画像処理装置。
【請求項5】 前記検査対象が搬送されるものであり、その搬送経路の所要の検査ポイントに前記検査対象が到達したことを検出する到達検出手段を備えており、この到達検出手段による検出信号をトリガとして前記検査対象の撮像および欠陥判定を行うように構成してあることを特徴とする請求項1から請求項4までのいずれかに記載の画像処理装置。
【請求項6】 前記検査対象における検査項目が取り込み画像データに含まれる複数の部分画像の位置ずれまたは品種違いとされていることを特徴とする請求項1から請求項5までのいずれかに記載の画像処理装置。
【図3】



【図1】
【図2】
【図4】
【図5】

【図6】
【図7】

【図9】
【図8】

【図10】
【図11】
【図1】
【図2】
【図4】
【図5】
【図6】
【図7】
【図9】
【図8】
【図10】
【図11】
【公開番号】特開2000−331162(P2000−331162A)
【公開日】平成12年11月30日(2000.11.30)
【国際特許分類】
【出願番号】特願平11−143261
【出願日】平成11年5月24日(1999.5.24)
【出願人】(000005049)シャープ株式会社 (33,933)
【出願人】(591072569)シャープマニファクチャリングシステム株式会社 (17)
【Fターム(参考)】
【公開日】平成12年11月30日(2000.11.30)
【国際特許分類】
【出願日】平成11年5月24日(1999.5.24)
【出願人】(000005049)シャープ株式会社 (33,933)
【出願人】(591072569)シャープマニファクチャリングシステム株式会社 (17)
【Fターム(参考)】
[ Back to top ]