
走査ビーム装置の較正
【課題】走査ビーム装置の較正
【解決手段】光源と、前記光源から光を受け取り、走査パターン内の、感光性位置センサでない較正パターン上でビームを走査するための走査光学素子と、前記較正パターンから後方散乱される光を前記走査パターン中の異なる時点において検出するための光検出器と、前記異なる時点の各々において検出された前記後方散乱光を、対応するそれぞれの時点に関する前記ビームの予想される位置で表すことにより、前記較正パターンの画像を生成するための画像生成論理回路と、前記較正パターンの前記生成画像を前記較正パターンの表示と比較するための比較論理回路と、を含むことを特徴とする装置。
【解決手段】光源と、前記光源から光を受け取り、走査パターン内の、感光性位置センサでない較正パターン上でビームを走査するための走査光学素子と、前記較正パターンから後方散乱される光を前記走査パターン中の異なる時点において検出するための光検出器と、前記異なる時点の各々において検出された前記後方散乱光を、対応するそれぞれの時点に関する前記ビームの予想される位置で表すことにより、前記較正パターンの画像を生成するための画像生成論理回路と、前記較正パターンの前記生成画像を前記較正パターンの表示と比較するための比較論理回路と、を含むことを特徴とする装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は走査ビーム装置に関する。特に、本発明の実施形態は走査ビーム装置の較正に関する。
【背景技術】
【0002】
様々な種類の走査ビーム装置が当業において知られており、また文献に記述されている。1つの種類の走査ビーム装置に、走査ファイバ装置がある。走査ファイバ装置は、単一の片持ち状の光ファイバを含むことができる。
【0003】
1つの態様では、走査ファイバ装置を使用して、目標領域の画像を取得することができる。目標領域の画像を取得する際、光学レンズシステムを通じて、及び走査パターンに従って目標領域上で照明スポットを走査するために、単一の片持ち状の光ファイバを振動させることができる。例えば光センサにより、後方散乱光を時系列で取り込むことができる。
【0004】
画像の取得時には、一般に、このことが走査全体を通じて光ファイバ及び/又は照明スポットの位置を正確に知る助けとなる。光ファイバの走査に使用する駆動信号を知ることにより、走査パターン中の個々のピクセル点に関して照明スポットの位置を推定できるようになる。しかしながら実際には、環境変数、製造変数、不完全な電子装置、共鳴周波数付近における走査ファイバ装置の感度、及び/又はその他の要因により、このような推定の精度が制限されがちな可能性がある。このような位置の不正確さは、走査ファイバ装置以外のその他の種類の走査ビーム装置においても存在しがちな可能性がある。
【0005】
このような位置の不正確さを考慮しなければ、走査ファイバ装置を使用して生成される画像に歪みが加わりがちな可能性がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願第20060072843号
【特許文献2】米国特許出願第20060072874号
【発明の概要】
【課題を解決するための手段】
【0007】
以下の説明及び本発明の実施形態の例示に使用する添付図面を参照することにより、本発明を最もよく理解することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正する方法のブロックフロー図である。
【図2】本発明の1又はそれ以上の実施形態による、走査パターン内の較正パターン上で光のビームを走査する走査ビーム装置を示すブロック図である。
【図3】光学素子をその共鳴周波数のQ因子内で走査することを示す図である。
【図4】本発明の1又はそれ以上の実施形態による、実際の、すなわち観察される走査パターン(点線で示す)が予想される、すなわち理想的な走査パターン(実線で示す)とどのように相違する可能性があるかについての一例を示す図である。
【図5】本発明の1又はそれ以上の実施形態による、走査ビーム装置を使用して較正パターンの画像を取得する例示的な方法のブロックフロー図である。
【図6】本発明の1又はそれ以上の実施形態による駆動信号の較正方法のブロックフロー図である。
【図7】本発明の1又はそれ以上の実施形態によるピクセル位置の較正方法のブロックフロー図である。
【図8】本発明の1又はそれ以上の実施形態による走査ビーム装置の較正方法のブロックフロー図である。
【図9】本発明の1又はそれ以上の実施形態による、関心のある面の画像を取得する方法のブロックフロー図である。
【図10A】本発明の様々な実施形態による適当な較正パターンの例である。
【図10B】本発明の様々な実施形態による適当な較正パターンの例である。
【図10C】本発明の様々な実施形態による適当な較正パターンの例である。
【図10D】本発明の様々な実施形態による適当な較正パターンの例である。
【図10E】本発明の様々な実施形態による適当な較正パターンの例である。
【図10F】本発明の様々な実施形態による適当な較正パターンの例である。
【図11】本発明の1又はそれ以上の実施形態による、走査ビーム装置のための較正システムの一例のさらなる詳細を示すブロック図である。
【図12】本発明の実施形態を実行できる例示的な走査ビーム装置のブロック図である。
【図13】本発明の1又はそれ以上の実施形態による走査ファイバプローブの詳細例の断面側面図である。
【発明を実施するための形態】
【0009】
以下の説明では、数多くの具体的な詳細について説明する。しかしながら、これらの具体的な詳細を伴わずに本発明の実施形態を実施できることを理解されたい。その他の例では、この説明を曖昧に理解しないように、公知の回路、構造及び技術については詳細に示していない。
【0010】
米国特許出願第20060072843号には、画像において歪みを低減させるためのリマッピング法が開示される。この明細書に開示されるように、走査パターン中に感光性位置センサを使用して、走査照明スポットの位置を能動的に捕捉することができる。しかしながら、このような感光性位置センサの使用は、潜在的にある欠点を有する可能性がある。一つには、感光性位置センサは高価になりがちである。さらに、感光性位置センサはサイズが限定されがちである。このことは、較正できる視野を制限しがちな可能性がある。さらに別の潜在的欠点は、感光性位置センサは、迷光又は反射光に影響されやすい傾向にあるという点である。このことは、較正の有効性を制限しがちな可能性がある。さらに別の潜在的欠点は、較正中に感光性位置センサを通る1つの信号路と、動作中に後方散乱光を検出するために使用される光検出器を通る別の信号路とが存在するという点である。これらの異なる信号路は異なる位相後退を有する可能性があり、これが較正を複雑化し及び/又は生成される画像に歪みを加えがちな可能性がある。上記と同様に、或いは別様にその他の欠点に直面する可能性もある。いずれにせよ、このような感光性位置センサを必要とせずに走査ビーム装置を較正するための方法及び装置は、いくらかの利点を提供することができる。
【0011】
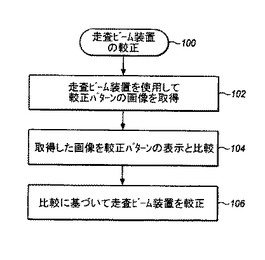
図1は、本発明の1又はそれ以上の実施形態による走査ビーム装置を較正する方法100のブロックフロー図である。ブロック102において、走査ビーム装置を使用して較正パターンの画像を取得することができる。適当な較正パターンの例としては、以下に限定されるわけではないが、図10A〜図10Fに示すものが含まれ、これらについては以下でさらに説明する。
【0012】
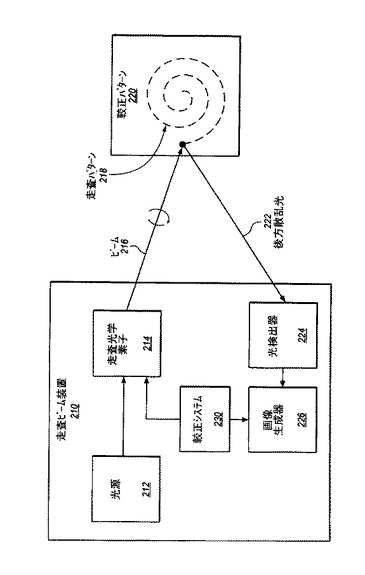
この方法についてさらに説明する前に、走査ビーム装置について、及び走査ビーム装置を使用して較正パターンの画像を取得する例示的な方法について簡単に説明することが有用である可能性がある。図2は、本発明の1又はそれ以上の実施形態による、走査パターン218における較正パターン220上に光のビーム216を走査する走査ビーム装置210を示すブロック図である。本発明の様々な実施形態では、走査ビーム装置は、内視鏡、走査ファイバ内視鏡、カテーテル、気管支鏡、ファイバスコープ、顕微鏡、ボロスコープ、バーコードリーダ、又は当業で公知のその他の画像取得装置及び/又は表示装置の形をとることができる。
【0013】
走査ビーム装置は光源212を含む。一例として、光源としては、1又はそれ以上のレーザダイオード又はその他のレーザを含むことができる。1つの態様では、光源は、1又はそれ以上の赤色光源、青色光源、緑色光源(これらはまとめて「RGB光源」と呼ばれる)、白色光源、赤外線光源、紫外線光源、及び/又は(例えば、治療用走査ビーム装置のための)高密度レーザ源を含むことができる。特定の実施構成に応じて、光源は、連続した流れの光、変調光、又は一条の光パルスを放射することができる。光源は、任意で、第1のモード(例えば連続した流れ)と第2のモード(例えば一条の光パルス)との間で切り換わるように構成することができる。光源は、例えば色結合器、フィルタなどのその他の従来の構成要素を任意で含むことができる。
【0014】
光源は走査光学素子214に光を供給する。走査光学素子は、例えば(光ファイバなどの)導波管、鏡、又はレンズなどの光学素子を含むことができる。走査光学素子はまた、例えば、圧電アクチュエータ、磁気アクチュエータ、電磁アクチュエータ、静電アクチュエータ、音波アクチュエータ、電気化学アクチュエータ、その他のトランスデューサ、又は光学素子を動かすことができるその他のアクチュエータなどのアクチュエータを含むこともできる。アクチュエータは、本明細書では駆動信号とも呼ぶ電気信号を受け取ることができ、この信号は、アクチュエータに光学素子を動かさせて走査パターン内の較正パターンを横切る光のビームを走査させる。ビームを平行にし、或いは平行な光線を有することも可能であるが、その必要はない。
【0015】
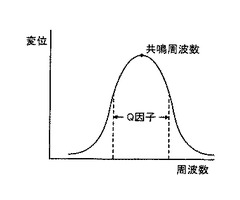
様々な周波数で光ファイバ又はその他の走査光学素子を動かすことができるが、本発明の1又はそれ以上の実施形態では、これらを機械的な、すなわち振動共鳴周波数(又は共鳴周波数の調波)のQ因子内で動かすことができる。このことは、走査を行うために必要なエネルギー量を削減するのに役立つことができる。図3は、光学素子をその共鳴周波数のQ因子内で走査することを示す図である。
【0016】
しかしながら、走査光ファイバの場合、共鳴周波数又はその付近における走査は、照明スポットの位相を駆動信号に対して約90°ずらす可能性がある。このことは、光ファイバの動きを共鳴周波数のすぐそばの周波数変化に対して比較的敏感にさせがちな可能性がある。例えば、駆動信号が正確に共鳴周波数でない場合、照明スポットは、位相が90°ずれた状態から、より駆動信号と同相に近づくように動くことができる。このことは、生成される画像に歪みを加えがちな可能性がある。共鳴周波数又はその付近においてその他の走査光学素子を走査する場合、同様の歪みが潜在的に導入される可能性がある。以下でさらに詳述するように、本発明の1又はそれ以上の実施形態では、ピクセル位置の較正を使用して、位相を共鳴周波数又はその付近に維持する困難さによる歪みだけでなく、駆動信号の較正後にさえも残りがちな可能性のあるその他の歪みを除去し、或いは少なくとも低減させることができる。
【0017】
再び図2を参照すると、図示のように、走査パターンは螺旋状の走査パターンを含むことができるが、これは必須ではない。その他の適当な走査パターンの例として、以下に限定されるわけではないが、長円形、円形、プロペラパターン、及びこれらの組合せなどのその他の放射状走査パターン、及びラスタ走査パターン、リサジュー走査パターン、及びこれらの組合せなどの非放射状走査パターンが挙げられる。走査パターンは、一次元又は二次元であってもよい。
【0018】
前述したように、一般に、このことが走査全体にわたって照明スポット又は光源の位置を正確に知る助けとなる。駆動信号を知ることにより、走査パターン中に個々のピクセル点に関して照明スポット又はビームの位置を推定できるようになる。しかしながら実際には、環境変数、製造変数、不完全な電子装置、潜在的に共鳴周波数付近における走査ビーム装置の感度、及び/又はその他の要因により、このような推定の精度が制限されがちな可能性がある。従って、走査全体にわたる照明スポットの実際の位置が予想される位置とは異なる可能性がある。
このような位置の違いを考慮しなければ、走査ビーム装置を使用して生成される画像に歪みが加わりがちな可能性がある。
【0019】
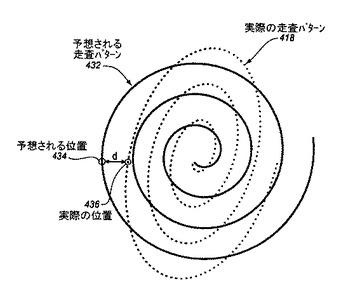
図4は、本発明の1又はそれ以上の実施形態による、実際の、すなわち観察される走査パターン418(点線で示す)が予想される、すなわち理想的な走査パターン432(実線で示す)とどのように相違する可能性があるかについての一例を示す図である。この例では、予想される走査パターンは円形螺旋をたどる一方、実際の走査パターンは楕円螺旋をたどる。その他の実施形態では、実際の走査パターンと予想される走査パターンは別様に異なることもある。図示のように、走査全体にわたって予想されるビームの位置は、対応する時点におけるビームの実際の位置とは大幅に異なる場合がある。代表的な距離dを使用して、特定の時点における予想されるビームの位置434と実際のビームの位置436との差異を示す。
【0020】
再び図2を参照すると、走査パターン全体を通じて較正パターンから光222が反射又は後方散乱される可能性がある。後方散乱される光の量は、上記特定の時点に光のビームにより照射される較正パターンの部分の(色、彩度などの)光学特性に部分的に依存することができる。後方散乱光は、予想されるビームの位置ではなく、走査全体にわたってビームの実際の位置における較正パターンの光学特性を表すことに留意されたい。
【0021】
走査ビーム装置は光検出器224を含む。適当な光検出器の例として、以下に限定されるわけではないが、光ダイオード、荷電結合素子、光電子増倍管、フォトトランジスタ、及び当業で公知のその他の光検出器、並びにこれらの組合せが挙げられる。光検出器は、走査パターン全体を通じて異なる時点における後方散乱光を検出することができる。本発明の1又はそれ以上の実施形態では、光検出器を、較正パターンに近接させて走査ビーム装置の遠位端(例えば、プローブ部分内)に配置することができる。或いは、本発明の1又はそれ以上の実施形態では、光導波管を使用して、遠位端から離れて(例えば、ベースステーション内に)位置する光検出器へ後方散乱光を搬送することができる。
【0022】
走査ビーム装置は、光検出器と結合した、或いは別様に通信する画像生成器226を含む。画像生成器は、走査パターン全体を通じて異なる時点で検出される光の量を表す信号を受け取ることができる。画像生成器は、これらの信号を使用して対応する較正パターンの画像を生成することができる。本発明の1又はそれ以上の実施形態では、画像生成器は、走査パターン全体を通じて異なる時点で検出された後方散乱光をこれらのそれぞれの時点で予想されるビームの位置に置き、或いは表すことができる。説明を簡単にするために、後方散乱光は、生成された画像内の位置に「置かれる」と言うことができる。これは、後方散乱光が検出される可能性、また検出された光の量を「表す」電気信号を使用して、生成された画像内の位置における後方散乱光を表す可能性を含むことを意図するものである。
【0023】
手短かに振り返ると、図5は、本発明の1又はそれ以上の実施形態による、走査ビーム装置を使用して較正パターンの画像を取得する例示的な方法502のブロックフロー図である。ブロック540において、走査パターン内の較正パターン上で光のビームを走査することができる。次に、ブロック542において、較正パターンから後方散乱された光、すなわちビームの一部を走査パターン中の異なる時点で検出することができる。次に、ブロック544において、異なる時点の各々において検出される後方散乱された光をそれぞれの時点における対応する予想されるビームの位置、すなわち理想的な位置に置くこと、すなわち表すことにより、較正パターンの画像を生成することができる。本明細書では、生成された画像のことを取得した画像と呼ぶこともできる。
【0024】
前述したように、較正の前に、実際のビームの位置が予想されるビームの位置と潜在的に異なる場合がある。従って、予想されるビームの位置に後方散乱光を置くこと、すなわち表すことにより、取得した画像内に歪みが導入される可能性がある。同じ駆動信号及び物理的システムを使用して走査ビーム装置を駆動する場合、(関連する環境要因が変わらない限り)これらの歪みが個々の走査で繰り返されがちな可能性がある。取得した較正パターンの画像におけるこれらの歪みを有利に使用して走査ビーム装置を較正し、予想される走査パターンと実際の走査パターンとの間の差異を考慮することにより、走査ビーム装置を使用して生成される次の画像において歪みが除去され、或いは少なくとも低減されるようになる。
【0025】
再び図1を参照すると、較正パターンの画像を取得した後、ブロック104において、取得した画像を較正パターンの表示と比較することができる。較正パターンの表示は、真の表示、すなわち少なくとも取得した画像よりも正確な較正パターンの表示となり得る。従って、歪んだ取得した較正パターンの画像とより正確な較正パターンの表示との比較を、走査ビーム装置を較正するための測定基準又はガイドとして使用することができる。様々な実施形態では、実行者が手動で、アルゴリズムにより自動で、或いは一部を実行者が、一部をアルゴリズムによってこの比較を行うことができる。
【0026】
異なる種類の較正パターンの表示が可能である。1又はそれ以上の実施形態では、この表示は、較正パターンの電子画像又はその他の電子的類似物を含むことができる。別の選択肢として、1又はそれ以上の実施形態では、この表示は、心像、絵画、印象、又はその他の較正パターンの心的表示を含むことができる。さらに別の選択肢として、1又はそれ以上の実施形態では、この表示は、1又はそれ以上の、或いは1組の較正パターンの特徴又は特性を含むことができる。例えば、この表示は、較正パターン内の対象の数、対象の形、対象のサイズ、対象の向き、対象の色、又はこのような特徴又は特性の組合せを含むことができる。このような表示の組み合せも適している。
【0027】
ブロック106において、比較に少なくとも部分的に基づいて、走査ビーム装置を較正することができる。本発明の1又はそれ以上の実施形態では、走査ビーム装置を較正するステップは、走査光学素子の駆動に使用する1又はそれ以上の駆動パラメータ、すなわち駆動信号を調整するステップを含むことができる。一例として、この調整を使用して、実際の走査パターンを予想される走査パターンにより厳密に一致させることができる。
【0028】
別の選択肢として、本発明の1又はそれ以上の実施形態では、走査ビーム装置を較正するステップは、(例えば、走査中の異なる時点に関する較正済みの宛先ピクセルなどの)較正済み画像の位置情報を決定するステップと、潜在的に記憶又は別様に保存するステップとを含むことができる。較正済み画像の位置情報は、取得した画像と表示との間の差異に基づくものであってもよく、この差異はさらに実際の走査パターンと予想される走査パターンとの間の差異に基づくものであってもよい。一例として、現在の駆動信号に関する実際の走査パターンと予想される走査パターンとの間の差異を考慮するために、及び/又は歪みを減少させるために、較正済み画像の位置情報を使用して、走査パターン中の異なる時点で検出される後方散乱光に後続して生成される画像内の位置を調整することができる。
【0029】
さらに別の選択肢として、本発明の1又はそれ以上の実施形態では、駆動信号の較正及びピクセル位置の較正の両方の組合せを任意で行うことができる。通常、1又はそれ以上の、或いは極めて少ない数の駆動信号の較正を行うことができ、その後1又はそれ以上のピクセル位置の較正を行うことができる。
【0030】
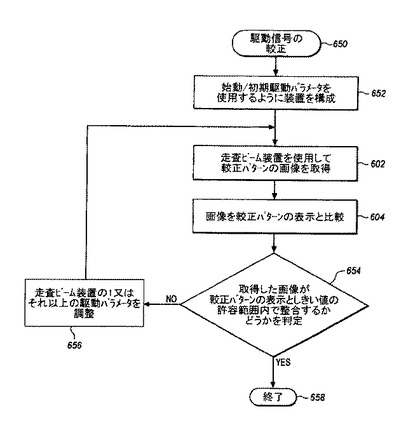
図6は、本発明の1又はそれ以上の実施形態による駆動信号の較正方法650のブロックフロー図である。ブロック652において、走査ビーム装置を、1組の始動又は初期駆動パラメータを使用するように構成することができる。初期駆動パラメータを推定し、理論上決定し、或いは別様に決定することができる。1つの選択肢として、初期駆動パラメータをメモリに記憶し、及びこれにアクセスすることができる。例えば、2006年4月6日に出願された米国特許出願第20060072874号に適当な構成メモリが開示されている。別の選択肢として、初期駆動パラメータを記憶したコンパクトディスク又はその他の機械可読媒体を走査ビーム装置に同梱して出荷することができる。さらに別の選択肢として、インターネット又は別のネットワークを介して初期駆動パラメータにアクセスすることができる。さらに別の選択肢として、実行者が初期駆動パラメータを手動で入力又は設定することができ、これらの初期駆動パラメータを、使用するための命令セットとして任意で提供することができる。或いは、走査ビーム装置を、当業で公知のその他の方法を使用して初期駆動パラメータを使用するように構成することができる。
【0031】
特定の駆動パラメータは、走査ビーム装置及び走査パターンの種類によって決まる。一例として、螺旋状の走査パターンで走査される走査ファイバ装置のための代表的な駆動パラメータとして、(1)最大x軸駆動電圧、(2)最大y軸駆動電圧、(3)x軸駆動電圧とy軸駆動電圧との間の位相差、(4)電圧ランプ/上昇の勾配、及び(5)任意で電圧ランプ/上昇の勾配における変化が挙げられる。螺旋の高さ及び幅は、それぞれy軸及びx軸駆動電圧と直接関連する傾向にある。螺旋断面の増加率は、電圧ランプ/上昇の勾配と直接関連する傾向にある。任意ではあるが、電圧ランプ/上昇の勾配における変化を使用して、走査全体にわたって螺旋径のより均一な増加率を達成することができる。
【0032】
ブロック602において、走査ビーム装置を使用して較正パターンの画像を取得することができる。始動又は初期駆動パラメータを使用して走査パターン内の較正パターン上でビームを走査することにより画像を取得することができる。次に、ブロック604において、取得した画像を較正パターンの表示と比較することができる。これらの比較は、ほぼ前述したように行うことができる。
【0033】
ブロック654において、比較により、取得した画像が較正パターンの表示としきい値の許容範囲内で一致していることが示されているかどうかを判定することができる。この判定を行う別の方式も可能であり、その方法がこれまで行われてきた。
【0034】
1つの選択肢として、本発明の1又はそれ以上の実施形態では、この判定は、取得した画像及び較正パターンの表示内の対象物のサイズ及び/又は形状を比較するステップと、これらがしきい値の許容範囲内で一致しているかどうかを判定するステップとを含むことができる。一例として、取得した画像内のある円の半径又は平均半径を表示内の円の半径又は平均半径と比較し、これらがしきい値の許容範囲内で一致しているかどうかを判定することができる。別の例として、例えば画像内のある円の最小半径に対するこの円の最大半径の比を求め、この比と1との差がしきい値の許容範囲未満であるかどうかを判定することにより、この円の円形度をテストすることができる。或いは、その他の対象物のその他のサイズ及び/又は形状を比較することもできる。
【0035】
別の選択肢として、本発明の1又はそれ以上の実施形態では、この判定は、取得した画像内のある点の位置を較正パターンの表示内の対応する点の位置と比較して、この位置の差がしきい値の距離又は許容範囲未満であるかどうかを判定するステップを含むことができる。例えば、この点は固定点、無作為に選ばれた点、又はある計画により選ばれた点であってもよい。任意で距離の2乗値又は絶対値を使用することもできる。必要に応じて、パターン全体にわたって潜在的に散在する点のうちの複数の対応する対を任意に使用してもよい。
【0036】
さらに別の選択肢として、本発明の1又はそれ以上の実施形態では、取得した画像の較正パターンの表示との比較は、走査中の異なる時点で走査されたビームの実際の座標を推測又は推定するステップを含むことができる。取得した較正パターンの画像を分析して、1又はそれ以上の点、或いはその他の特徴を識別することができる。例えば、図10Aに示す円のうちの1つの頂部、底部、右側、左側を識別することができる。次に、1又はそれ以上の対応する特徴を較正パターンの表示内で識別することができる。例えば、較正パターンの表示内の1又はそれ以上の特徴の各々のx、y座標などの座標を知り、識別することができる。一例として、較正パターンの表示は関連する座標系を有することができ、この座標系内に1又はそれ以上の点又はその他の特徴が潜在的な座標値を有することができる。次に、取得した画像内の所定の特徴の座標を、較正パターンの表示内の所定の特徴の既知の座標と同じものと仮定することができる。このようにして、取得した画像内の点又はその他の特徴を較正パターンの表示内の対応する点又はその他の特徴の既知の座標に写像することができる。これらの座標は、走査パターン中の異なる時点における走査ビームの実際の位置の推定として役立つとともに、さらに後述するように、これらを較正に使用することができる。
【0037】
これらはごくわずかな例に過ぎない。任意でこれらの例示的な方法の組合せを使用することもできる。当業者及び本開示を利用できる人々には、統計的、経験的、又は発見的パターン比較の方法が明らかであろう。
【0038】
取得した画像が較正パターンの表示と十分に一致しない(すなわち判定が「no」である)場合、この方法は、ブロック654からブロック656へ進むことができる。ブロック656において、走査ビーム装置の1又はそれ以上の駆動パラメータを調整することができる。1又はそれ以上の駆動パラメータの調整は、その後取得される較正パターンの画像を較正パターンの表示により厳密に一致させるのに有利に役立つことができる。
【0039】
駆動パラメータを調整する異なる方法も可能である。本発明の1又はそれ以上の実施形態では、実行者がパラメータを手動で調整することができる。必要に応じて、実行者は、調整のガイドに役立てるために計算を行い、或いは走査ビーム装置のシミュレーション又はその他のモデルを使用することができる。別の選択肢として、実行者は、経験、直感に基づき、或いは比較的ランダムにパラメータを調整することができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、制御ループを使用してパラメータを調整することができる。ハードウェア、ソフトウェア、又はハードウェアとソフトウェアとの組合せの形で制御ループを実行することができる。様々な態様において、制御ループは、計算、又は走査ビーム装置の動作のシミュレーション又はモデルに基づいて、或いは知的検索又は最適化法を使用してパラメータを調整することができる。或いは、制御ループは、(例えば、モンテカルロ法を使用して)比較的経験的にパラメータを調整することができる。これらはごくわずかな例に過ぎない。当業者及び本開示を利用できる人々にはその他の方法も明らかであろう。
【0040】
駆動パラメータを調整する特定の方法は、走査ビーム装置及び走査パターンの種類によって決まる。一例として、螺旋状走査パターンで動作する走査ファイバ装置の駆動パラメータに対するいくつかの考えられる調整について検討されたい。
【0041】
一例として、比較により、走査のズームすなわち大きさがオフであることを示すことができる。例えば、取得した画像内に較正パターン内のある対象又は一部の対象の一部のみが現れることがある。x軸及びy軸の電圧ランプ/上昇の両方の勾配を調整することにより、この歪みを減少させることができる。最大駆動電圧を上昇させて螺旋を拡大し、或いは低下させて螺旋を圧縮することができる。必要に応じて、x軸及びy軸の電圧ランプ/上昇の勾配における変化(例えば、最大駆動電圧における変化)を使用して、走査全体にわたる螺旋径のより均一な増加率の達成に役立てることができる。
【0042】
別の例として、比較により、螺旋状の走査パターンが、例えば図4に示すような楕円形であることが示される場合がある。このような場合、垂直方向に楕円形の螺旋状走査パターンをより円形にするために、y軸駆動電圧をx軸駆動電圧に対して低下させることができる。或いは、水平方向に楕円形の螺旋状走査パターンをより円形にするために、x軸駆動電圧をy軸駆動電圧に対して低下させることができる。
【0043】
さらに別の例として、本発明の1又はそれ以上の実施形態では、取得した画像内の特徴を対応する較正パターンの表示内の特徴の既知の座標に写像することにより、走査中の異なる時点で走査されたビームの実際の座標の推定が利用可能となる。このような場合、推定される実際の座標を使用して較正をガイドすることができる。さらに説明すると、実行者が調整を行う場合、推定される実際の座標及び走査されるビームの予想される/理想的な座標を、走査中の異なる時点においてプロットすることができる。例えば、図4に示すプロットと同様のプロットを作成することができる。この任意のプロットは、実行者が差異を理解するとともに、この差異を減少させる駆動信号の調整を理解するのに役立つことができる。一例として、図4に示すように、実際の走査パターンの最大y値が、予想される走査パターンの最大y値よりも大きい場合、最大y軸駆動電圧を低下させて走査を垂直方向に圧縮することができる。同様に、図4に示すように、実際の走査パターンの最大x値が、予想される走査パターンの最大x値よりも小さい場合、最大x軸駆動電圧を上昇させて走査を水平方向に拡大することができる。これらの調整は、楕円状の走査を円形化するのに役立つことができる。座標値を知ることの別の潜在的利点として、例えば座標の比率又は座標に関連する距離の比率などを使用して調整の量を数学的に計算できるという点がある。アルゴリズムも座標を使用してこのような調整を同様に行うことができるが、潜在的にこのようなプロットを作図することはない。
【0044】
これらはごくわずかな例に過ぎない。当業者及び本開示を利用できる人々にはその他の例が明らかであろう。
【0045】
ブロック656において1又はそれ以上の駆動パラメータを調整した後、この方法は、ブロック602、604、及び654を1又はそれ以上の回数繰り返すことができる。場合によっては、この方法は、ブロック602、604、654、及び656を通じて任意のブロックを数回から最大100回まで、或いは必要があればこれ以上の回数ループすることができる。少なくともある時点まで、より多くのループは、走査ビーム装置の駆動信号のより良好な較正を促進しがちな可能性がある。ある時点で、取得した画像が較正パターンの表示と十分に一致した(すなわち、ブロック654における判定が「yes」となった)場合、この方法は、ブロック654からブロック658へ進むことができる。或いは、例えばこの方法の所定の回数の反復が行われた場合などのその他の基準も任意に使用することができる。
【0046】
ブロック658において、駆動信号の較正方法は「終了」することができる。調整済みのパラメータを、始動/初期駆動パラメータの場所に記憶又は別様に保存することができる。1又はそれ以上の実施形態では、米国特許出願第20060072843号に記載される前述の構成メモリに調整済みの駆動パラメータを任意に記憶することができる。駆動電子装置が、例えばさらなる較正、又はその用途のために次に動作する際に、この調整済みの駆動パラメータを駆動電子装置が使用することができる。
【0047】
特定の概念を説明するために特定の方法650を示し、これについて説明したが、本発明の範囲はこの特定の方法に限定されるものではない。代替の実施形態では、いくつかの動作をこの方法から任意に省き、及び/又はこの方法に追加することができる。例えば、ブロック654における判定を任意に省くことができる。このような判定を行わずに、方法の1又はそれ以上の所定の回数の反復を任意に行うことができ、この回数も任意に構成可能である。別の例として、ブロック604とブロック656との間に調整及び/又は調整の量を任意に計算することができる。計算された調整は、任意にシミュレーション、コンピュータモデル、又は最適化モデルに基づくものであってよく、この調整は駆動信号の較正を迅速に実行しがちな可能性がある。その他の修正及び/又は適合も可能であり、当業者及び本開示を利用できる人々にはこれらが明らかであろう。
【0048】
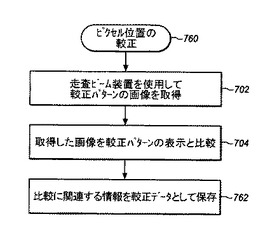
図7は、本発明の1又はそれ以上の実施形態によるピクセル位置の較正方法760のブロックフロー図である。ブロック702において、走査ビーム装置を使用して較正パターンの画像を取得することができる。これは、ほぼ前述したように行うことができる。駆動信号の較正が事前に行われている場合、調整済みの駆動パラメータを使用して走査パターン内の較正パターン上でビームを走査することにより画像を取得することができる。駆動信号の較正に使用したのと同じ較正パターン、或いは全く異なる(潜在的にピクセル位置の較正により適した)較正パターンを使用することができる。或いは、駆動信号の較正が行われていない場合、始動/初期駆動パラメータを使用することができる。
【0049】
次に、ブロック704において、取得した画像を較正パターンの表示と比較することができる。この比較は、ほぼ前述したように行うことができる。
【0050】
ブロック762において、比較に関連する較正済みの画像位置情報を決定して(例えば、走査ビーム装置のメモリ内に)記憶又は別様に保存することができる。本発明の1又はそれ以上の実施形態では、米国特許出願第20060072843号に記載される前述の構成メモリに較正データを記憶することができるが、これは必須ではない。
【0051】
本発明の1又はそれ以上の実施形態では、較正済みの画像位置情報は、走査中のそれぞれの時点に関する較正済みの宛先ピクセルの位置を含むことができる。較正済みの宛先ピクセルの位置は、取得した画像と較正パターンの表示との間の差異により、及び/又は取得した画像の点又は特徴を対応する較正パターンの表示内の既知の座標に写像することにより、間接的に推測される予想されるビームの位置ではなく、実際のビームの位置を表示又は推定するように試みることができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、この情報は、例えば予想されるビームの位置からの方向のずれ又は変位を含むことができる。さらに別の選択肢として、この情報は、宛先ピクセルの位置及びずれ又は変位の両方の組合せを含むことができる。このようなピクセル位置の較正は、機械的共鳴周波数又はその付近における動作に起因する歪み、又は駆動信号の較正後に残留しがちな可能性のあるその他の歪みを除去し、或いは少なくとも減少させるのに役立つことができるという利点がある。
【0052】
特定の概念を説明するために特定の方法760を示し、これについて説明したが、本発明の範囲はこの特定の方法に限定されるものではない。代替の実施形態では、この方法に任意にいくつかの動作を追加することができる。例えば、この方法を1又はそれ以上の回数任意に反復して、較正済みの画像ピクセル又はその他の位置情報を微調整することができる。別の例として、複数の画像を取得して比較し、保存されている較正データを統計的に平均化することができる。その他の修正及び/又は適合も可能であり、当業者及び本開示を利用できる人々にはこれらが明らかであろう。
【0053】
走査ビーム装置を使用して、モノクロ画像、カラー画像、又はこれらの両方を生成することができる。走査ビーム装置を別の方法で較正してカラー画像を生成することも可能である。
【0054】
本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正してカラー画像を生成する1つの方法は、モノクロ較正パターンを使用するステップを含む。モノクロ較正パターン上で色の異なる光のビームを走査することにより、異なるモノクロ較正パターンの画像を取得することができる。1又はそれ以上の実施形態では、異なる色の光として赤色、緑色、及び青色光を含むことができるが、本発明の範囲はこれらに限定されるものではない。色の異なる光の各々に関して後方散乱光を検出することができる。パターンの黒色部分は、色の異なる各々の光の大部分を吸収しがちな可能性があり、一方白色部分は、色の異なる各々の光の大部分を反射しがちな可能性がある。
【0055】
異なる取得した画像の各々を、モノクロ較正パターンの表示と比較することができる。例えば、色収差が存在するようないくつかの場合には(レンズが色収差を加えがちな可能性がある)、異なる色の各々が表示と異なる場合がある。従って、本発明の1又はそれ以上の実施形態では、走査ビーム装置は、異なる色の光の各々に異なる量だけ較正を行うことができる。色収差が存在する場合、このことが、色収差の視覚的影響を減少させるのに役立つことができる。
【0056】
色の異なる光の較正データを保存する別の方法も可能である。本発明の1又はそれ以上の実施形態では、走査中の複数の時点の各々に関する異なる宛先ピクセルの位置を、色の異なる光の各々について保存することができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、走査中の複数の時点の各々に関する宛先ピクセルの位置を、(赤色光などの)着色光の1つに関して記憶することができ、これらの記憶された宛先ピクセルの位置からの潜在的に異なるずれを、(緑色光及び青色光などの)残りの異なる着色光に関して時間の各々について記憶することができる。
【0057】
本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正してカラー画像を生成する別の方法は、多色較正パターンを使用するステップを含む。多色較正パターン上で(白色光などの)多色光を走査し、後方散乱光を色成分に分離し、この色成分を検出することにより、多色較正パターンの異なる画像を取得することができる。次に、異なる色成分の画像の各々を対応する較正パターンの色成分と比較することができる。異なる着色光に関する較正データを、前節で説明したように、或いは別様に保存することができる。
【0058】
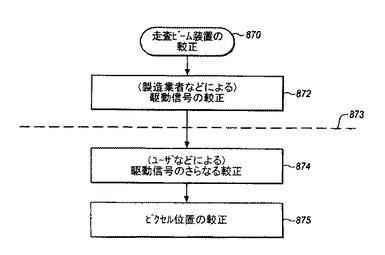
本明細書で説明するような較正を、潜在的に異なる時点で、また潜在的に異なる実体により行なうことができる。図8は、本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正する方法870の1つの特定例のブロックフロー図である。
【0059】
ブロック872において、本明細書で説明するような駆動信号の較正を行うことができる。本発明の1又はそれ以上の実施形態では、製造業者又はその他の第1の実体が、ブロック872の駆動信号の較正を行うことができる。次に、部分的に較正済みの走査ビーム装置を購買者、ユーザ、又は第2の実体に販売し、引渡し、又は別様に移送することができる。ブロック874において、本明細書で説明するようなさらなる駆動信号の較正を任意に行うことができる。製造環境及び使用環境において走査ビーム装置の駆動に使用される駆動システムは潜在的に異なるので、このことは、走査ビーム装置を例えば特定の駆動システムなどの特定の使用環境に対してカスタマイズするのに役立つことができる。次に、ブロック875において、本明細書で説明するようなピクセル位置の較正を行うことができる。破線873を使用して、例えば装置の製造業者などの第1の実体が走査ビーム装置の較正の一部を行うことができ、また例えば購買者及び/又はユーザなどの第2の実体が較正の第2の部分を行うことができることを示している。
【0060】
代替の実施形態も可能である。一例として、第2の実体は、さらなる駆動信号の較正を行わずにピクセル位置の較正を行うことができる。別の例として、第1の実体は、駆動信号の較正を行った後にピクセル位置の較正を行うことができ、また第2の実体は、さらなる駆動信号の較正及び/又はピクセル位置の較正を行うことができる。さらに、例えば歪みが検出された場合又は大きくなった場合、定期的メインテナンスにより、或いはその他の公知の基準により新しい装置を使用する場合などのその他の時に、本明細書で説明するような様々な種類の較正を行うことができる。
【0061】
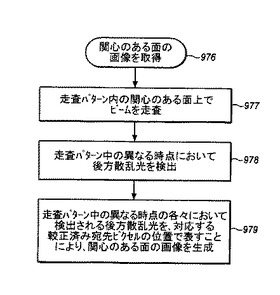
図9は、本発明の1又はそれ以上の実施形態による、関心のある面の画像を取得する方法976のブロックフロー図である。本発明の1又はそれ以上の実施形態では、例えば走査ビーム装置が、患者の体内へ挿入される内視鏡又はその他の医療用具である場合、走査ビーム装置を体内に進入させ、例えば体組織、体腔、中空器官、又は同様の関心のある面などの目標面に隣接して位置付けることができ、その後目標面の画像を取得することができる。しかしながら、バーコード及びその他の表面などの他の面も適しているので、本発明の範囲は上記のような面に限定されるものではない。
【0062】
ブロック977において、走査パターンの関心のある面上でビームを走査することができる。1又はそれ以上の実施形態では、本明細書で説明するように決定された較正済み駆動パラメータを使用することができる。或いは、始動/初期駆動パラメータを使用することができる。ブロック978において、走査パターン中の異なる時点において後方散乱光を検出することができる。次に、ブロック979において関心のある面の画像を生成することができる。本発明の1又はそれ以上の実施形態では、画像を生成するステップは、走査パターン中の複数の異なる時点の各々において検出される後方散乱光を、生成した画像内の対応する較正済み宛先画像の位置に置く又は表すステップを含むことができる。前述したように、本発明の1又はそれ以上の実施形態では、較正済み宛先画像の位置は、走査中のそれぞれの時点に関する宛先ピクセルの位置を含むことができる。別の選択肢として、上記と同様に、或いは別様にずれ又は変位を使用することもできる。宛先ピクセルの位置及び/又はずれは、取得した画像と較正パターンの表示との間の差異により、間接的に推測される予想されるビームの位置ではなく、実際のビームの位置を表示するように試みることができる。
【0063】
画像を表示するための類似の実施形態も可能である。本明細書で説明するように決定した較正済み駆動パラメータを走査中に使用することができる。本明細書で説明するように決定した較正済み画像の位置に変調光を置き、或いは表すことができる。
【0064】
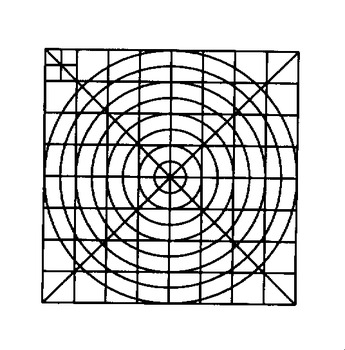
図10A〜図10Fは、本発明の様々な実施形態による適当な較正パターンの例である。図10Aは、均等に離間した水平線と垂直線との格子、直径が一定間隔で増大する8つの同心円、同心円の中心で交差する対角線、及び左上隅にある基準の+印を含む較正パターンである。
【0065】
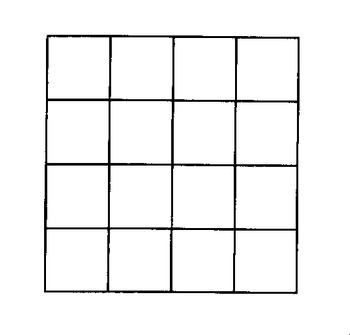
図10Bは、均等に離間した水平線と垂直線との格子から成る較正パターンである。傾斜付き格子又は異なる離間距離の格子を含むその他の様々な較正パターンも可能である。
【0066】
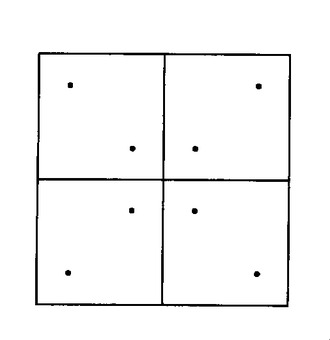
図10Cは、中央で交差する1対の水平線と垂直線及び8つの点から成る較正パターンである。8つの点は、4つの象限の各々の中に対角線に沿って2つの点が置かれる。異なる個数及び配置の点及び線を含むその他の様々な較正パターンも可能である。
【0067】
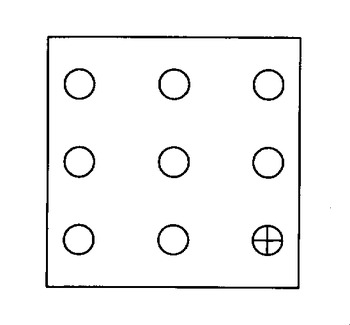
図10Dは、同一サイズの9つの小円の規則的なマトリックスから成る較正パターンであり、円の1つが内部に十字形のような識別マークを有する。較正に使用できる属性として、取得した画像内の円の個数とサイズとが含まれる。識別可能にマークを付けた円は向きを定めることができる。
【0068】
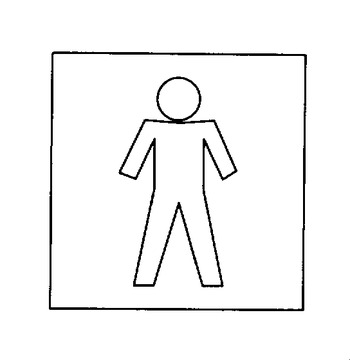
図10Eは、人の線画から成る較正パターンである。その他の様々な較正パターンとして、動物、物体、景色、及びその他の様々な主題を含むことができる。
【0069】
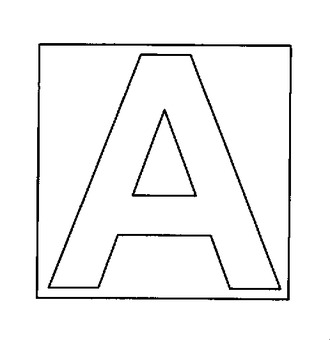
図10Fは、輪郭線で表す文字Aから成る較正パターンである。潜在的にその他の対象物を有するその他の文字、数字、及びこれらの組合せも適している。
【0070】
これら特定の較正パターンは例示に過ぎない。その他の適当な較正パターンとして、点又は線の抽象グループから幾何学的形状、非幾何学的形状、物体、絵文字、画像、写真、美術品、及びこのようなパターンの組合せに至るまでの様々な異なるパターンを含むことができる。本明細書で開示する1又はそれ以上の較正を行うために使用できるほとんどいずれのパターンも使用することができる。従って、「較正パターン」という用語は、広く解釈すべきである。
【0071】
特定の概念をさらに説明するために、図10Aに示す較正パターンを較正に使用できるいくつかの例示的方法について検討されたい。この較正パターンは、取得した画像と比較し、較正に使用することのできる様々な所定の特徴又は特性を有する。
【0072】
1つの特性は円の個数である。この較正パターンは8つの同心円を有する。取得した画像内に現れる円が8つ未満の場合、例えば(x軸及びy軸電圧などの)駆動信号を調整して走査の大きさを調整することができる。
【0073】
別の特性は円のサイズである。一例として、取得した画像内の全ての円が較正パターン内の全ての円よりも小さい場合、駆動信号を調整して走査の大きさを調整することができる。或いは、大きな外側の円は正しいサイズであるが、小さな内側の円が小さ過ぎる場合、電圧ランプ/上昇の変化を使用して螺旋径のより均一な増加率を促進することができる。
【0074】
さらに別の特性は円の形状である。場合によっては、円は楕円であってもよい。円形度の欠如に関する1つの潜在的な測定基準は、最大及び最小半径の比の1(数値の1)からの偏差値である。円がどれほど丸いかを判定する1つの方法は、円の最大及び最小半径の比の1からの偏差値を判断するステップを含む。取得した画像内で円が水平方向の楕円として現れる場合、x軸電圧に対してy軸電圧を下げることができる。或いは、取得した画像内で円が垂直方向の楕円として現れる場合、y軸電圧に対してx軸電圧を下げることができる。
【0075】
同様に、さらに別の特性は均等な間隔の水平線及び垂直線である。取得した画像において水平線間の間隔が垂直線間の間隔よりも大きい場合、この画像は真に円形の走査パターンではなく、垂直楕円形状の走査パターンを表している可能性がある。このような場合には、一例として、x軸電圧に対してy軸電圧を下げることができる。
【0076】
これらは、取得した画像の表示との比較を使用して駆動パラメータを調整できるわずかな例示的方法を提供するものである。その他の数多くの方法も可能であり、それらの方法がこれまでに使用されてきた。当業者及び本開示を利用できる人々であれば、使用できる異なる種類の較正パターン及び調整に使用できる較正パターンの特徴の関連する異なる比較に大きな柔軟性があることを理解するであろう。
【0077】
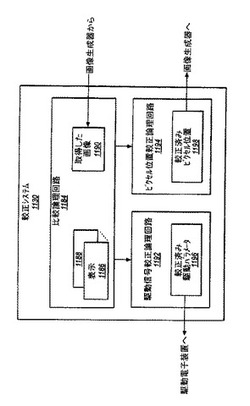
図2に示すように、走査ビーム装置は、本明細書に開示されるような1又はそれ以上の較正を実行できる較正システム230を含むことができる。図11は、本発明の1又はそれ以上の実施形態による、走査ビーム装置のための例示的な較正システム1130のさらなる詳細を示すブロック図である。
【0078】
この較正システムは比較論理回路1184を含む。比較論理回路は、本明細書の他の箇所で開示したように、較正パターン1186の表示を較正パターンの取得した画像1190と比較することができる。
【0079】
前述したように、較正パターンの表示は、較正パターンの電子画像又はその他の電子的類似物、或いは(円の個数、円のサイズなどの)較正パターンの特徴又は特性セットを含むことができる。一例として、表示と取得した画像とにメモリからアクセスし、或いは比較論理回路がこれらを別様に受け取り、或いは参照することができる。さらに別の選択肢として、表示は、走査ビーム装置には記憶されずに、実行者の考え又は心の中に記憶される心的表示であってもよい。
【0080】
図示のように、本発明の1又はそれ以上の実施形態では、(記憶されているか、或いは記憶されていないかにかかわらず)1又はそれ以上の追加の異なる表示1188を任意に使用することもできる。一例として、異なる表示は、異なる較正パターンの表示、走査の大きさが異なる同じ較正パターンの表示、又は異なる温度又はその他の環境条件下における同じ較正パターンの表示であってもよい。1つの態様では、複数の較正パターンを潜在的に使用して、例えば異なるパターンで、異なる程度の難しさで、単一の異なる駆動パラメータで、単一の異なる色成分で、などの異なる方法で走査ビーム装置を促すことができる。異なる表示を異なる温度に使用することができ、或いは例えば米国特許出願第______号に開示されるように、走査光学素子の温度をほぼ一定に維持することができる。同様に、異なる走査の大きさ、異なる環境条件などに関する異なる較正データのセットを記憶することができ、またこれらのセット間に挿入して走査の大きさ又は環境条件の連続スペクトルを提供する能力を任意に含めることができる。
【0081】
較正システムは、駆動信号較正論理回路1192及びピクセル位置較正論理回路1194も含む。これらの論理回路の各々は比較論理回路と結合され、或いは別様に通信する。本明細書の他の箇所で開示したように、駆動信号較正論理回路及びピクセル位置較正論理回路は、それぞれ駆動信号の較正及びピクセル位置の較正を行うことができる。具体的には、駆動信号較正論理回路は、1又はそれ以上の較正済み駆動パラメータ1196を決定することができる。これらの駆動パラメータを駆動電子装置に提供して後で使用することができる。1又はそれ以上の実施形態では、米国特許出願第20060072874号に開示されるような構成メモリに較正済み駆動パラメータを記憶することができるが、これは必須ではない。ピクセル位置較正論理回路は、1又はそれ以上の構成済みピクセル又はその他の画像位置1198を決定し、記憶又は別様に保存することができる。その後の画像生成中に、これらの較正済みピクセル又はその他の画像位置1198を画像生成器に提供することができ、或いは画像生成器がこれらにアクセスすることができる。
【0082】
本発明の1又はそれ以上の実施形態では、較正システムの論理回路は、例えば走査ビーム装置のメモリに記憶され、コントローラ、プロセッサ、又はその他の回路が実行できる一連の命令又はコードモジュールなどのソフトウェアを含むことができる。例えば、これらのモジュールとして、比較モジュール、駆動信号較正モジュール、及びピクセル位置較正モジュールを含むことができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、較正システムの論理回路は、例えば特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)、又はその他の回路などのハードウェアを含むことができる。さらに別の選択肢として、較正システムの論理回路は、ソフトウェアとハードウェアとの組合せを含むことができる。
【0083】
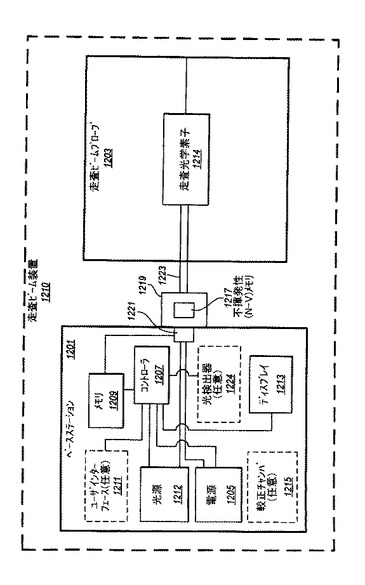
図12は、本発明の実施形態を実行できる例示的な走査ビーム装置1210のブロック図である。この走査ビーム装置は、ベースステーション1201と走査ビームプローブ1203とを含む2部形状因子を有する。このような2部形状因子は、内視鏡及びその他の医療用プローブ器具に好適な傾向にある。2部形状因子の1つの潜在的利点は、ベースステーション内に高価な及び/又は大きな構成要素を含むことができ、プローブを比較的安価に及び/又は小型にすることができるという点である。別の潜在的利点は、同じベースステーションが異なる種類のプローブを潜在的に使用でき、例えば清掃、メインテナンス、又は廃棄するためにプローブを取り外せるという点である。しかしながら、この二部形状因子は必須ではない。
【0084】
ベースステーションは、光源1212、電源1205、及びメモリ1209を含む。本発明の1又はそれ以上の実施形態では、メモリを使用して、本明細書に開示するような較正システムの少なくとも一部を実現するとともに別個のプロセッサ(図示せず)又はその他の回路が実行できるコードモジュールを記憶することができる。ベースステーションは任意の光検出器1224を含む。或いは、光検出器を走査ビームプローブ内に配置することもできる。ベースステーションは任意のユーザインターフェース1211を含む。ユーザインターフェースとして、少数のボタン、ダイヤル、キーボード、又は当業で公知の同様のインターフェースを含むことができる。ベースステーションは任意のディスプレイ1213も含む。別の選択肢として、ディスプレイをベースステーションから切り離して含み、或いは省略することができる。
【0085】
走査ビームプローブは走査光学素子1214を含む。本発明の1又はそれ以上の実施形態では、走査光学素子は、光ファイバ又は同様の導波管の単一の片持ち状の自由端部、圧電管、又は光ファイバ又は導波管を動かすためのその他のアクチュエータ管を含むことができる。このような走査光学素子の詳細な例を図13に示すとともにこの図と併せて説明を行う。或いは、電気活性ポリマー(EAP)材料、磁気アクチュエータ、電磁アクチュエータ、静電アクチュエータ、音波アクチュエータ、電気音響変換器、(MEMSなどの)電気機械アクチュエータ、又はその他の種類のアクチュエータを使用して光ファイバ又は導波管を動かすことができる。
【0086】
別の選択肢として、本発明の1又はそれ以上の実施形態では、走査光学素子は、光ビームの光路内の鏡又はその他の反射装置と、反射装置を動かすためのアクチュエータとを含むことができる。さらに別の選択肢として、走査光学素子は、アクチュエータが動かすことのできるレンズ又はその他の焦点調整装置を含むことができる。さらに別の選択肢として、走査光学素子は、検流計、互いに動く複数の光学素子など、及びこれらの組合せを含むことができる。これらの様々な走査光学素子を図2の装置において使用することもできる。
【0087】
走査ビームプローブは、ベースステーションのコネクタインターフェース1221と嵌合するように構成されたコネクタ部材1219を含む。コネクタ部材をコネクタインターフェースに結合することにより、ベースステーションと走査ビームプローブとの間に電気及び光学経路を作り出すことができる。一例として、電気経路は、電力経路と駆動信号経路とを含むことができ、また光学経路は、照明経路と潜在的に検出経路とを含むことができる。1又はそれ以上のケーブル1223を介してこれらの経路を伝えることができる。
【0088】
図示のように、走査ビームプローブは、任意の不揮発性(N−V)メモリ1217を含むことができるが、これは必須ではない。本発明の1又はそれ以上の実施形態では、不揮発性メモリをコネクタ部材内に配置することができる。不揮発性メモリを使用して、本明細書に開示するような較正済みの駆動パラメータ及び/又は較正済みの画像位置情報を記憶することができるが、これは必須ではない。
【0089】
図示のように、本発明の1又はそれ以上の実施形態では、走査ビーム装置のベースステーションは、任意の較正チャンバ1215を含むことができる。較正チャンバは、内部に1又はそれ以上の較正パターンを有することができる。このことは、1又はそれ以上の較正パターンを汚れ、風化、又はその他の損傷から保護するのに役立つことができる。較正チャンバはまた、較正パターンを見るための制御された光環境を提供するのにも役立つことができる。1つの態様では、較正チャンバは制御された温度を有することができ、これとは別にプローブは独立してほぼ一定の温度を維持することができる。本発明の1又はそれ以上の実施形態では、ベースステーションは、いくつかの較正パターン間で切り換えを行うための手段を有することができる。例えば、機械的な機構が、1つの較正パターンを別の較正パターンと置き換えることができる。較正チャンバはポートを有することができ、較正中、このポートに走査ビームプローブを結合することができる。このような結合は、走査ビームプローブを較正パターンに対して正確かつ着実に位置付けるのに役立つことができる。或いは、較正チャンバを任意に省略して、別個の製造装置又はその他の場所に含めることもできる。
【0090】
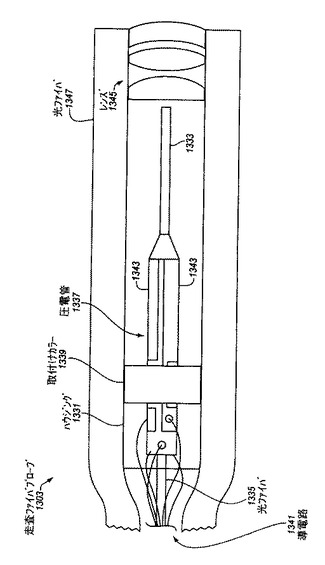
図13は、本発明の1又はそれ以上の実施形態による走査ファイバプローブ1303の詳細例の断面側面図である。この例は、本発明を限定するものではなく、例示にすぎないと解釈すべきである。この図示の特定のプローブは、患者の体内に挿入される内視鏡又はその他の比較的小さな器具又はプローブとしての使用によく適しているが、その他の実施構成では、プローブの設計及び動作を大幅に変更することができる。
【0091】
このプローブはハウジング1331を含む。ハウジングは、ステンレス鋼又は患者の体内に展開するのに適したその他の材料を含み、気密シールすることができる。ハウジングは小型又は微小であってもよい。例えば、本発明の1又はそれ以上の実施形態では、ハウジングは概ね管状であり、約5mm以下の直径又はその他の断面寸法と約20mm以下の長さとを有することができる。
【0092】
ハウジング内に光ファイバ1335の自由端部1333が含まれる。ハウジング内には圧電管1337も含まれる。この圧電管は、1つの考えられる種類のアクチュエータ管を表すものである。本発明の1又はそれ以上の実施形態では、圧電管はPZT5A材料を含むことができるが、これは必須ではない。光ファイバは、圧電管のほぼ円筒状の開口部を通じて挿入される。取付けカラー1339が、圧電管をハウジングに結合することができる。取付けカラーを貫通したしっかりと適合する概ね円筒状の開口部を通じて圧電管を挿入することができる。
【0093】
数多くのワイヤ又はその他の導電路1341が、ベースステーションからプローブの近位端まで延びる。導電路は、圧電管に電気信号を運ぶことができる。1又はそれ以上の実施形態では、圧電管は、光ファイバを二次元で動かすために、外面上に4つの象限金属電極1343を有することができる。4つの導電路の各々を圧電管上の4つの象限電極のそれぞれの1つにハンダ付け又は別様に電気的に結合することができる。これらの4つの導電路が駆動信号を圧電管へ運び、圧電管に光ファイバを、例えば拡大する螺旋状走査パターンで走査させることができる。1又はそれ以上の実施形態では、光ファイバを共鳴周波数で走査することができる。共鳴周波数では、駆動信号が光ファイバの位置に対して約90°位相ずれする可能性がある。1又はそれ以上の実施形態では、圧電管は、内面上に任意に接地電極を有することができる。任意に接地電極に1つの導電路を設けることができる。
【0094】
装置は1又はそれ以上のレンズ1345を含む。1又はそれ以上のレンズは、光ファイバの自由端部を通じて送られる光の光路内に置かれる。本発明の1又はそれ以上の実施形態では、1又はそれ以上のレンズとして、Pentax社製のレンズを含むことができる。或いは、任意にその他のレンズを使用することもできる。
【0095】
本発明の1又はそれ以上の実施形態では、目標面からの後方散乱光を回収するために、ハウジングの外部周辺に光ファイバ1347を含むことができる。一例として、フルカラー走査ファイバ内視鏡という特定の場合には、ハウジングの外部周辺に光を回収するための12本の光ファイバを含むことができる。光ファイバは、光を回収し、プローブの近位端、又はベースステーション内、或いはその他の場所に位置する1又はそれ以上の光検出器へ戻すことができる。
【0096】
説明を目的として、上記の説明では、本発明の実施形態の完全な理解をもたらすために数多くの特定の詳細について説明した。説明した特定の実施形態は、本発明を限定するためではなく、本発明を説明するために提供したものである。これらの特定の詳細のいくつかを伴わずに、実施形態を実施することができる。さらに、本明細書で開示した実施形態に、例えば、実施形態の構成要素のサイズ、形状、構成、形態、機能、材料、動作の態様、並びに組み立て及び使用法に対して修正を施すことができる。図面に示し、本明細書で説明したものに対する全ての同等の関連物が、本発明の実施形態の範囲に含まれる。本発明の範囲は、上記に提供した特定の実施例によってではなく、以下の特許請求の範囲により決定されるべきである。さらに、図を通じて参照番号の末端部を適宜繰り返し、任意に同様の特性を有する可能性がある対応又は類似する要素を示した。
【0097】
様々な動作及び方法について説明した。基本的な形で方法について説明したが、これらの方法に様々な動作を任意に追加することができる。場合によっては、これらの方法からいくつかの動作を取り除くことができる。場合によっては、これらの方法の動作を異なる順序で行うこともできる。これらの方法に対して多くの修正及び適合を行うことができ、可能であり、企図することができる。
【0098】
ハードウェア構成要素により特定の動作を行うことができ、或いは機械実行可能命令の形で特定の動作を具現化することができ、これらを使用して、動作を実行する命令で回路をプログラムし、或いは少なくともこのような回路を作り出すことができる。回路は、ごくわずかな例を挙げれば、汎用又は専用プロセッサ、又は論理回路を含むことができる。ハードウェアとソフトウェアとの組合せにより、任意にこれらの動作を行うこともできる。
【0099】
ソフトウェア又はその他の命令を記憶した機械アクセス可能媒体及び/又は機械可読媒体を含むことができるプログラム製品又はその他の製造の物品として本発明の1又はそれ以上の実施形態を提供することができる。この媒体は、機械により実行された場合、本明細書に開示した1又はそれ以上の動作又は方法を実行する機械をもたらし、或いは機械にこのような1又はそれ以上の動作又は方法を実行させることができる命令を提供することができる。適当な機械として、以下に限定されるわけではないが、ごくわずかな例を挙げれば、走査ビーム装置、ベースステーション、内視鏡ベースステーション、医療機器、コンピュータシステム、及び1又はそれ以上のプロセッサを備えたその他の様々な装置が含まれる。
【0100】
媒体は、機械によりアクセス可能な種類の情報を記憶又は提供する機構を含むことができる。例えば、媒体として、フロッピー(登録商標)ディスケット、光学記憶媒体、光ディスク、CD−ROM、磁気ディスク、光磁気ディスク、読出し専用メモリ(ROM)、プログラム可能ROM(PROM)、消去及びプログラム可能ROM(EPROM)、電気的に消去及びプログラム可能ROM(EEPROM)、ランダムアクセスメモリ(RAM)、スタティックRAM(SRAM),ダイナミックRAM(DRAM)、フラッシュメモリ、及びこれらの組合せなどの記録可能及び/又は非記録可能媒体を任意に含むことができる。本発明の1又はそれ以上の実施形態では、1又はそれ以上の走査ビーム装置と使用するための命令とを含むキットに機械可読媒体を含む製造の物品を含めることができる。
【0101】
以下の特許請求の範囲では、「走査ビーム装置」、「走査光学素子」、「走査ビームプローブ」等における「走査」という用語は、特に明記しない限り、その機器又は装置が使用中であること、或いは現在走査中であることを意味するものではない。むしろ「走査」という用語は、その機器又は装置が走査可能であるということを意味しているに過ぎない。
【0102】
なお、本明細書を通じて、「1つの実施形態」、「実施形態」、又は「1又はそれ以上の実施形態」に対する言及は、例えば、本発明の実施に際して特定の特徴を含むことができることを意味するものであると理解されたい。同様に、本開示を簡素化し、様々な発明の態様の理解に役立てる目的で、説明において様々な特徴を単一の実施形態、図又はその説明にまとめた部分があることを理解されたい。しかしながら、本開示のこの方法について、本発明が、個々の請求項に明確に記載したよりも多くの特徴を必要とするという意図を反映したものであると解釈すべきではない。むしろ、以下の特許請求の範囲が示すように、発明の態様は、単一の開示した実施形態の全ての特徴よりも少ないものにより成立することができる。従って、詳細な説明に続く特許請求の範囲は、本明細書によりこの詳細な説明において明確に引用され、個々の請求項は、それ自体が本発明の独立した実施形態として成立するものである。
【符号の説明】
【0103】
100 走査ビーム装置の較正
102 走査ビーム装置を使用して較正パターンの画像を取得
104 取得した画像を較正パターンの表示と比較
106 比較に基づいて走査ビーム装置を較正
【技術分野】
【0001】
本発明の実施形態は走査ビーム装置に関する。特に、本発明の実施形態は走査ビーム装置の較正に関する。
【背景技術】
【0002】
様々な種類の走査ビーム装置が当業において知られており、また文献に記述されている。1つの種類の走査ビーム装置に、走査ファイバ装置がある。走査ファイバ装置は、単一の片持ち状の光ファイバを含むことができる。
【0003】
1つの態様では、走査ファイバ装置を使用して、目標領域の画像を取得することができる。目標領域の画像を取得する際、光学レンズシステムを通じて、及び走査パターンに従って目標領域上で照明スポットを走査するために、単一の片持ち状の光ファイバを振動させることができる。例えば光センサにより、後方散乱光を時系列で取り込むことができる。
【0004】
画像の取得時には、一般に、このことが走査全体を通じて光ファイバ及び/又は照明スポットの位置を正確に知る助けとなる。光ファイバの走査に使用する駆動信号を知ることにより、走査パターン中の個々のピクセル点に関して照明スポットの位置を推定できるようになる。しかしながら実際には、環境変数、製造変数、不完全な電子装置、共鳴周波数付近における走査ファイバ装置の感度、及び/又はその他の要因により、このような推定の精度が制限されがちな可能性がある。このような位置の不正確さは、走査ファイバ装置以外のその他の種類の走査ビーム装置においても存在しがちな可能性がある。
【0005】
このような位置の不正確さを考慮しなければ、走査ファイバ装置を使用して生成される画像に歪みが加わりがちな可能性がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願第20060072843号
【特許文献2】米国特許出願第20060072874号
【発明の概要】
【課題を解決するための手段】
【0007】
以下の説明及び本発明の実施形態の例示に使用する添付図面を参照することにより、本発明を最もよく理解することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正する方法のブロックフロー図である。
【図2】本発明の1又はそれ以上の実施形態による、走査パターン内の較正パターン上で光のビームを走査する走査ビーム装置を示すブロック図である。
【図3】光学素子をその共鳴周波数のQ因子内で走査することを示す図である。
【図4】本発明の1又はそれ以上の実施形態による、実際の、すなわち観察される走査パターン(点線で示す)が予想される、すなわち理想的な走査パターン(実線で示す)とどのように相違する可能性があるかについての一例を示す図である。
【図5】本発明の1又はそれ以上の実施形態による、走査ビーム装置を使用して較正パターンの画像を取得する例示的な方法のブロックフロー図である。
【図6】本発明の1又はそれ以上の実施形態による駆動信号の較正方法のブロックフロー図である。
【図7】本発明の1又はそれ以上の実施形態によるピクセル位置の較正方法のブロックフロー図である。
【図8】本発明の1又はそれ以上の実施形態による走査ビーム装置の較正方法のブロックフロー図である。
【図9】本発明の1又はそれ以上の実施形態による、関心のある面の画像を取得する方法のブロックフロー図である。
【図10A】本発明の様々な実施形態による適当な較正パターンの例である。
【図10B】本発明の様々な実施形態による適当な較正パターンの例である。
【図10C】本発明の様々な実施形態による適当な較正パターンの例である。
【図10D】本発明の様々な実施形態による適当な較正パターンの例である。
【図10E】本発明の様々な実施形態による適当な較正パターンの例である。
【図10F】本発明の様々な実施形態による適当な較正パターンの例である。
【図11】本発明の1又はそれ以上の実施形態による、走査ビーム装置のための較正システムの一例のさらなる詳細を示すブロック図である。
【図12】本発明の実施形態を実行できる例示的な走査ビーム装置のブロック図である。
【図13】本発明の1又はそれ以上の実施形態による走査ファイバプローブの詳細例の断面側面図である。
【発明を実施するための形態】
【0009】
以下の説明では、数多くの具体的な詳細について説明する。しかしながら、これらの具体的な詳細を伴わずに本発明の実施形態を実施できることを理解されたい。その他の例では、この説明を曖昧に理解しないように、公知の回路、構造及び技術については詳細に示していない。
【0010】
米国特許出願第20060072843号には、画像において歪みを低減させるためのリマッピング法が開示される。この明細書に開示されるように、走査パターン中に感光性位置センサを使用して、走査照明スポットの位置を能動的に捕捉することができる。しかしながら、このような感光性位置センサの使用は、潜在的にある欠点を有する可能性がある。一つには、感光性位置センサは高価になりがちである。さらに、感光性位置センサはサイズが限定されがちである。このことは、較正できる視野を制限しがちな可能性がある。さらに別の潜在的欠点は、感光性位置センサは、迷光又は反射光に影響されやすい傾向にあるという点である。このことは、較正の有効性を制限しがちな可能性がある。さらに別の潜在的欠点は、較正中に感光性位置センサを通る1つの信号路と、動作中に後方散乱光を検出するために使用される光検出器を通る別の信号路とが存在するという点である。これらの異なる信号路は異なる位相後退を有する可能性があり、これが較正を複雑化し及び/又は生成される画像に歪みを加えがちな可能性がある。上記と同様に、或いは別様にその他の欠点に直面する可能性もある。いずれにせよ、このような感光性位置センサを必要とせずに走査ビーム装置を較正するための方法及び装置は、いくらかの利点を提供することができる。
【0011】
図1は、本発明の1又はそれ以上の実施形態による走査ビーム装置を較正する方法100のブロックフロー図である。ブロック102において、走査ビーム装置を使用して較正パターンの画像を取得することができる。適当な較正パターンの例としては、以下に限定されるわけではないが、図10A〜図10Fに示すものが含まれ、これらについては以下でさらに説明する。
【0012】
この方法についてさらに説明する前に、走査ビーム装置について、及び走査ビーム装置を使用して較正パターンの画像を取得する例示的な方法について簡単に説明することが有用である可能性がある。図2は、本発明の1又はそれ以上の実施形態による、走査パターン218における較正パターン220上に光のビーム216を走査する走査ビーム装置210を示すブロック図である。本発明の様々な実施形態では、走査ビーム装置は、内視鏡、走査ファイバ内視鏡、カテーテル、気管支鏡、ファイバスコープ、顕微鏡、ボロスコープ、バーコードリーダ、又は当業で公知のその他の画像取得装置及び/又は表示装置の形をとることができる。
【0013】
走査ビーム装置は光源212を含む。一例として、光源としては、1又はそれ以上のレーザダイオード又はその他のレーザを含むことができる。1つの態様では、光源は、1又はそれ以上の赤色光源、青色光源、緑色光源(これらはまとめて「RGB光源」と呼ばれる)、白色光源、赤外線光源、紫外線光源、及び/又は(例えば、治療用走査ビーム装置のための)高密度レーザ源を含むことができる。特定の実施構成に応じて、光源は、連続した流れの光、変調光、又は一条の光パルスを放射することができる。光源は、任意で、第1のモード(例えば連続した流れ)と第2のモード(例えば一条の光パルス)との間で切り換わるように構成することができる。光源は、例えば色結合器、フィルタなどのその他の従来の構成要素を任意で含むことができる。
【0014】
光源は走査光学素子214に光を供給する。走査光学素子は、例えば(光ファイバなどの)導波管、鏡、又はレンズなどの光学素子を含むことができる。走査光学素子はまた、例えば、圧電アクチュエータ、磁気アクチュエータ、電磁アクチュエータ、静電アクチュエータ、音波アクチュエータ、電気化学アクチュエータ、その他のトランスデューサ、又は光学素子を動かすことができるその他のアクチュエータなどのアクチュエータを含むこともできる。アクチュエータは、本明細書では駆動信号とも呼ぶ電気信号を受け取ることができ、この信号は、アクチュエータに光学素子を動かさせて走査パターン内の較正パターンを横切る光のビームを走査させる。ビームを平行にし、或いは平行な光線を有することも可能であるが、その必要はない。
【0015】
様々な周波数で光ファイバ又はその他の走査光学素子を動かすことができるが、本発明の1又はそれ以上の実施形態では、これらを機械的な、すなわち振動共鳴周波数(又は共鳴周波数の調波)のQ因子内で動かすことができる。このことは、走査を行うために必要なエネルギー量を削減するのに役立つことができる。図3は、光学素子をその共鳴周波数のQ因子内で走査することを示す図である。
【0016】
しかしながら、走査光ファイバの場合、共鳴周波数又はその付近における走査は、照明スポットの位相を駆動信号に対して約90°ずらす可能性がある。このことは、光ファイバの動きを共鳴周波数のすぐそばの周波数変化に対して比較的敏感にさせがちな可能性がある。例えば、駆動信号が正確に共鳴周波数でない場合、照明スポットは、位相が90°ずれた状態から、より駆動信号と同相に近づくように動くことができる。このことは、生成される画像に歪みを加えがちな可能性がある。共鳴周波数又はその付近においてその他の走査光学素子を走査する場合、同様の歪みが潜在的に導入される可能性がある。以下でさらに詳述するように、本発明の1又はそれ以上の実施形態では、ピクセル位置の較正を使用して、位相を共鳴周波数又はその付近に維持する困難さによる歪みだけでなく、駆動信号の較正後にさえも残りがちな可能性のあるその他の歪みを除去し、或いは少なくとも低減させることができる。
【0017】
再び図2を参照すると、図示のように、走査パターンは螺旋状の走査パターンを含むことができるが、これは必須ではない。その他の適当な走査パターンの例として、以下に限定されるわけではないが、長円形、円形、プロペラパターン、及びこれらの組合せなどのその他の放射状走査パターン、及びラスタ走査パターン、リサジュー走査パターン、及びこれらの組合せなどの非放射状走査パターンが挙げられる。走査パターンは、一次元又は二次元であってもよい。
【0018】
前述したように、一般に、このことが走査全体にわたって照明スポット又は光源の位置を正確に知る助けとなる。駆動信号を知ることにより、走査パターン中に個々のピクセル点に関して照明スポット又はビームの位置を推定できるようになる。しかしながら実際には、環境変数、製造変数、不完全な電子装置、潜在的に共鳴周波数付近における走査ビーム装置の感度、及び/又はその他の要因により、このような推定の精度が制限されがちな可能性がある。従って、走査全体にわたる照明スポットの実際の位置が予想される位置とは異なる可能性がある。
このような位置の違いを考慮しなければ、走査ビーム装置を使用して生成される画像に歪みが加わりがちな可能性がある。
【0019】
図4は、本発明の1又はそれ以上の実施形態による、実際の、すなわち観察される走査パターン418(点線で示す)が予想される、すなわち理想的な走査パターン432(実線で示す)とどのように相違する可能性があるかについての一例を示す図である。この例では、予想される走査パターンは円形螺旋をたどる一方、実際の走査パターンは楕円螺旋をたどる。その他の実施形態では、実際の走査パターンと予想される走査パターンは別様に異なることもある。図示のように、走査全体にわたって予想されるビームの位置は、対応する時点におけるビームの実際の位置とは大幅に異なる場合がある。代表的な距離dを使用して、特定の時点における予想されるビームの位置434と実際のビームの位置436との差異を示す。
【0020】
再び図2を参照すると、走査パターン全体を通じて較正パターンから光222が反射又は後方散乱される可能性がある。後方散乱される光の量は、上記特定の時点に光のビームにより照射される較正パターンの部分の(色、彩度などの)光学特性に部分的に依存することができる。後方散乱光は、予想されるビームの位置ではなく、走査全体にわたってビームの実際の位置における較正パターンの光学特性を表すことに留意されたい。
【0021】
走査ビーム装置は光検出器224を含む。適当な光検出器の例として、以下に限定されるわけではないが、光ダイオード、荷電結合素子、光電子増倍管、フォトトランジスタ、及び当業で公知のその他の光検出器、並びにこれらの組合せが挙げられる。光検出器は、走査パターン全体を通じて異なる時点における後方散乱光を検出することができる。本発明の1又はそれ以上の実施形態では、光検出器を、較正パターンに近接させて走査ビーム装置の遠位端(例えば、プローブ部分内)に配置することができる。或いは、本発明の1又はそれ以上の実施形態では、光導波管を使用して、遠位端から離れて(例えば、ベースステーション内に)位置する光検出器へ後方散乱光を搬送することができる。
【0022】
走査ビーム装置は、光検出器と結合した、或いは別様に通信する画像生成器226を含む。画像生成器は、走査パターン全体を通じて異なる時点で検出される光の量を表す信号を受け取ることができる。画像生成器は、これらの信号を使用して対応する較正パターンの画像を生成することができる。本発明の1又はそれ以上の実施形態では、画像生成器は、走査パターン全体を通じて異なる時点で検出された後方散乱光をこれらのそれぞれの時点で予想されるビームの位置に置き、或いは表すことができる。説明を簡単にするために、後方散乱光は、生成された画像内の位置に「置かれる」と言うことができる。これは、後方散乱光が検出される可能性、また検出された光の量を「表す」電気信号を使用して、生成された画像内の位置における後方散乱光を表す可能性を含むことを意図するものである。
【0023】
手短かに振り返ると、図5は、本発明の1又はそれ以上の実施形態による、走査ビーム装置を使用して較正パターンの画像を取得する例示的な方法502のブロックフロー図である。ブロック540において、走査パターン内の較正パターン上で光のビームを走査することができる。次に、ブロック542において、較正パターンから後方散乱された光、すなわちビームの一部を走査パターン中の異なる時点で検出することができる。次に、ブロック544において、異なる時点の各々において検出される後方散乱された光をそれぞれの時点における対応する予想されるビームの位置、すなわち理想的な位置に置くこと、すなわち表すことにより、較正パターンの画像を生成することができる。本明細書では、生成された画像のことを取得した画像と呼ぶこともできる。
【0024】
前述したように、較正の前に、実際のビームの位置が予想されるビームの位置と潜在的に異なる場合がある。従って、予想されるビームの位置に後方散乱光を置くこと、すなわち表すことにより、取得した画像内に歪みが導入される可能性がある。同じ駆動信号及び物理的システムを使用して走査ビーム装置を駆動する場合、(関連する環境要因が変わらない限り)これらの歪みが個々の走査で繰り返されがちな可能性がある。取得した較正パターンの画像におけるこれらの歪みを有利に使用して走査ビーム装置を較正し、予想される走査パターンと実際の走査パターンとの間の差異を考慮することにより、走査ビーム装置を使用して生成される次の画像において歪みが除去され、或いは少なくとも低減されるようになる。
【0025】
再び図1を参照すると、較正パターンの画像を取得した後、ブロック104において、取得した画像を較正パターンの表示と比較することができる。較正パターンの表示は、真の表示、すなわち少なくとも取得した画像よりも正確な較正パターンの表示となり得る。従って、歪んだ取得した較正パターンの画像とより正確な較正パターンの表示との比較を、走査ビーム装置を較正するための測定基準又はガイドとして使用することができる。様々な実施形態では、実行者が手動で、アルゴリズムにより自動で、或いは一部を実行者が、一部をアルゴリズムによってこの比較を行うことができる。
【0026】
異なる種類の較正パターンの表示が可能である。1又はそれ以上の実施形態では、この表示は、較正パターンの電子画像又はその他の電子的類似物を含むことができる。別の選択肢として、1又はそれ以上の実施形態では、この表示は、心像、絵画、印象、又はその他の較正パターンの心的表示を含むことができる。さらに別の選択肢として、1又はそれ以上の実施形態では、この表示は、1又はそれ以上の、或いは1組の較正パターンの特徴又は特性を含むことができる。例えば、この表示は、較正パターン内の対象の数、対象の形、対象のサイズ、対象の向き、対象の色、又はこのような特徴又は特性の組合せを含むことができる。このような表示の組み合せも適している。
【0027】
ブロック106において、比較に少なくとも部分的に基づいて、走査ビーム装置を較正することができる。本発明の1又はそれ以上の実施形態では、走査ビーム装置を較正するステップは、走査光学素子の駆動に使用する1又はそれ以上の駆動パラメータ、すなわち駆動信号を調整するステップを含むことができる。一例として、この調整を使用して、実際の走査パターンを予想される走査パターンにより厳密に一致させることができる。
【0028】
別の選択肢として、本発明の1又はそれ以上の実施形態では、走査ビーム装置を較正するステップは、(例えば、走査中の異なる時点に関する較正済みの宛先ピクセルなどの)較正済み画像の位置情報を決定するステップと、潜在的に記憶又は別様に保存するステップとを含むことができる。較正済み画像の位置情報は、取得した画像と表示との間の差異に基づくものであってもよく、この差異はさらに実際の走査パターンと予想される走査パターンとの間の差異に基づくものであってもよい。一例として、現在の駆動信号に関する実際の走査パターンと予想される走査パターンとの間の差異を考慮するために、及び/又は歪みを減少させるために、較正済み画像の位置情報を使用して、走査パターン中の異なる時点で検出される後方散乱光に後続して生成される画像内の位置を調整することができる。
【0029】
さらに別の選択肢として、本発明の1又はそれ以上の実施形態では、駆動信号の較正及びピクセル位置の較正の両方の組合せを任意で行うことができる。通常、1又はそれ以上の、或いは極めて少ない数の駆動信号の較正を行うことができ、その後1又はそれ以上のピクセル位置の較正を行うことができる。
【0030】
図6は、本発明の1又はそれ以上の実施形態による駆動信号の較正方法650のブロックフロー図である。ブロック652において、走査ビーム装置を、1組の始動又は初期駆動パラメータを使用するように構成することができる。初期駆動パラメータを推定し、理論上決定し、或いは別様に決定することができる。1つの選択肢として、初期駆動パラメータをメモリに記憶し、及びこれにアクセスすることができる。例えば、2006年4月6日に出願された米国特許出願第20060072874号に適当な構成メモリが開示されている。別の選択肢として、初期駆動パラメータを記憶したコンパクトディスク又はその他の機械可読媒体を走査ビーム装置に同梱して出荷することができる。さらに別の選択肢として、インターネット又は別のネットワークを介して初期駆動パラメータにアクセスすることができる。さらに別の選択肢として、実行者が初期駆動パラメータを手動で入力又は設定することができ、これらの初期駆動パラメータを、使用するための命令セットとして任意で提供することができる。或いは、走査ビーム装置を、当業で公知のその他の方法を使用して初期駆動パラメータを使用するように構成することができる。
【0031】
特定の駆動パラメータは、走査ビーム装置及び走査パターンの種類によって決まる。一例として、螺旋状の走査パターンで走査される走査ファイバ装置のための代表的な駆動パラメータとして、(1)最大x軸駆動電圧、(2)最大y軸駆動電圧、(3)x軸駆動電圧とy軸駆動電圧との間の位相差、(4)電圧ランプ/上昇の勾配、及び(5)任意で電圧ランプ/上昇の勾配における変化が挙げられる。螺旋の高さ及び幅は、それぞれy軸及びx軸駆動電圧と直接関連する傾向にある。螺旋断面の増加率は、電圧ランプ/上昇の勾配と直接関連する傾向にある。任意ではあるが、電圧ランプ/上昇の勾配における変化を使用して、走査全体にわたって螺旋径のより均一な増加率を達成することができる。
【0032】
ブロック602において、走査ビーム装置を使用して較正パターンの画像を取得することができる。始動又は初期駆動パラメータを使用して走査パターン内の較正パターン上でビームを走査することにより画像を取得することができる。次に、ブロック604において、取得した画像を較正パターンの表示と比較することができる。これらの比較は、ほぼ前述したように行うことができる。
【0033】
ブロック654において、比較により、取得した画像が較正パターンの表示としきい値の許容範囲内で一致していることが示されているかどうかを判定することができる。この判定を行う別の方式も可能であり、その方法がこれまで行われてきた。
【0034】
1つの選択肢として、本発明の1又はそれ以上の実施形態では、この判定は、取得した画像及び較正パターンの表示内の対象物のサイズ及び/又は形状を比較するステップと、これらがしきい値の許容範囲内で一致しているかどうかを判定するステップとを含むことができる。一例として、取得した画像内のある円の半径又は平均半径を表示内の円の半径又は平均半径と比較し、これらがしきい値の許容範囲内で一致しているかどうかを判定することができる。別の例として、例えば画像内のある円の最小半径に対するこの円の最大半径の比を求め、この比と1との差がしきい値の許容範囲未満であるかどうかを判定することにより、この円の円形度をテストすることができる。或いは、その他の対象物のその他のサイズ及び/又は形状を比較することもできる。
【0035】
別の選択肢として、本発明の1又はそれ以上の実施形態では、この判定は、取得した画像内のある点の位置を較正パターンの表示内の対応する点の位置と比較して、この位置の差がしきい値の距離又は許容範囲未満であるかどうかを判定するステップを含むことができる。例えば、この点は固定点、無作為に選ばれた点、又はある計画により選ばれた点であってもよい。任意で距離の2乗値又は絶対値を使用することもできる。必要に応じて、パターン全体にわたって潜在的に散在する点のうちの複数の対応する対を任意に使用してもよい。
【0036】
さらに別の選択肢として、本発明の1又はそれ以上の実施形態では、取得した画像の較正パターンの表示との比較は、走査中の異なる時点で走査されたビームの実際の座標を推測又は推定するステップを含むことができる。取得した較正パターンの画像を分析して、1又はそれ以上の点、或いはその他の特徴を識別することができる。例えば、図10Aに示す円のうちの1つの頂部、底部、右側、左側を識別することができる。次に、1又はそれ以上の対応する特徴を較正パターンの表示内で識別することができる。例えば、較正パターンの表示内の1又はそれ以上の特徴の各々のx、y座標などの座標を知り、識別することができる。一例として、較正パターンの表示は関連する座標系を有することができ、この座標系内に1又はそれ以上の点又はその他の特徴が潜在的な座標値を有することができる。次に、取得した画像内の所定の特徴の座標を、較正パターンの表示内の所定の特徴の既知の座標と同じものと仮定することができる。このようにして、取得した画像内の点又はその他の特徴を較正パターンの表示内の対応する点又はその他の特徴の既知の座標に写像することができる。これらの座標は、走査パターン中の異なる時点における走査ビームの実際の位置の推定として役立つとともに、さらに後述するように、これらを較正に使用することができる。
【0037】
これらはごくわずかな例に過ぎない。任意でこれらの例示的な方法の組合せを使用することもできる。当業者及び本開示を利用できる人々には、統計的、経験的、又は発見的パターン比較の方法が明らかであろう。
【0038】
取得した画像が較正パターンの表示と十分に一致しない(すなわち判定が「no」である)場合、この方法は、ブロック654からブロック656へ進むことができる。ブロック656において、走査ビーム装置の1又はそれ以上の駆動パラメータを調整することができる。1又はそれ以上の駆動パラメータの調整は、その後取得される較正パターンの画像を較正パターンの表示により厳密に一致させるのに有利に役立つことができる。
【0039】
駆動パラメータを調整する異なる方法も可能である。本発明の1又はそれ以上の実施形態では、実行者がパラメータを手動で調整することができる。必要に応じて、実行者は、調整のガイドに役立てるために計算を行い、或いは走査ビーム装置のシミュレーション又はその他のモデルを使用することができる。別の選択肢として、実行者は、経験、直感に基づき、或いは比較的ランダムにパラメータを調整することができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、制御ループを使用してパラメータを調整することができる。ハードウェア、ソフトウェア、又はハードウェアとソフトウェアとの組合せの形で制御ループを実行することができる。様々な態様において、制御ループは、計算、又は走査ビーム装置の動作のシミュレーション又はモデルに基づいて、或いは知的検索又は最適化法を使用してパラメータを調整することができる。或いは、制御ループは、(例えば、モンテカルロ法を使用して)比較的経験的にパラメータを調整することができる。これらはごくわずかな例に過ぎない。当業者及び本開示を利用できる人々にはその他の方法も明らかであろう。
【0040】
駆動パラメータを調整する特定の方法は、走査ビーム装置及び走査パターンの種類によって決まる。一例として、螺旋状走査パターンで動作する走査ファイバ装置の駆動パラメータに対するいくつかの考えられる調整について検討されたい。
【0041】
一例として、比較により、走査のズームすなわち大きさがオフであることを示すことができる。例えば、取得した画像内に較正パターン内のある対象又は一部の対象の一部のみが現れることがある。x軸及びy軸の電圧ランプ/上昇の両方の勾配を調整することにより、この歪みを減少させることができる。最大駆動電圧を上昇させて螺旋を拡大し、或いは低下させて螺旋を圧縮することができる。必要に応じて、x軸及びy軸の電圧ランプ/上昇の勾配における変化(例えば、最大駆動電圧における変化)を使用して、走査全体にわたる螺旋径のより均一な増加率の達成に役立てることができる。
【0042】
別の例として、比較により、螺旋状の走査パターンが、例えば図4に示すような楕円形であることが示される場合がある。このような場合、垂直方向に楕円形の螺旋状走査パターンをより円形にするために、y軸駆動電圧をx軸駆動電圧に対して低下させることができる。或いは、水平方向に楕円形の螺旋状走査パターンをより円形にするために、x軸駆動電圧をy軸駆動電圧に対して低下させることができる。
【0043】
さらに別の例として、本発明の1又はそれ以上の実施形態では、取得した画像内の特徴を対応する較正パターンの表示内の特徴の既知の座標に写像することにより、走査中の異なる時点で走査されたビームの実際の座標の推定が利用可能となる。このような場合、推定される実際の座標を使用して較正をガイドすることができる。さらに説明すると、実行者が調整を行う場合、推定される実際の座標及び走査されるビームの予想される/理想的な座標を、走査中の異なる時点においてプロットすることができる。例えば、図4に示すプロットと同様のプロットを作成することができる。この任意のプロットは、実行者が差異を理解するとともに、この差異を減少させる駆動信号の調整を理解するのに役立つことができる。一例として、図4に示すように、実際の走査パターンの最大y値が、予想される走査パターンの最大y値よりも大きい場合、最大y軸駆動電圧を低下させて走査を垂直方向に圧縮することができる。同様に、図4に示すように、実際の走査パターンの最大x値が、予想される走査パターンの最大x値よりも小さい場合、最大x軸駆動電圧を上昇させて走査を水平方向に拡大することができる。これらの調整は、楕円状の走査を円形化するのに役立つことができる。座標値を知ることの別の潜在的利点として、例えば座標の比率又は座標に関連する距離の比率などを使用して調整の量を数学的に計算できるという点がある。アルゴリズムも座標を使用してこのような調整を同様に行うことができるが、潜在的にこのようなプロットを作図することはない。
【0044】
これらはごくわずかな例に過ぎない。当業者及び本開示を利用できる人々にはその他の例が明らかであろう。
【0045】
ブロック656において1又はそれ以上の駆動パラメータを調整した後、この方法は、ブロック602、604、及び654を1又はそれ以上の回数繰り返すことができる。場合によっては、この方法は、ブロック602、604、654、及び656を通じて任意のブロックを数回から最大100回まで、或いは必要があればこれ以上の回数ループすることができる。少なくともある時点まで、より多くのループは、走査ビーム装置の駆動信号のより良好な較正を促進しがちな可能性がある。ある時点で、取得した画像が較正パターンの表示と十分に一致した(すなわち、ブロック654における判定が「yes」となった)場合、この方法は、ブロック654からブロック658へ進むことができる。或いは、例えばこの方法の所定の回数の反復が行われた場合などのその他の基準も任意に使用することができる。
【0046】
ブロック658において、駆動信号の較正方法は「終了」することができる。調整済みのパラメータを、始動/初期駆動パラメータの場所に記憶又は別様に保存することができる。1又はそれ以上の実施形態では、米国特許出願第20060072843号に記載される前述の構成メモリに調整済みの駆動パラメータを任意に記憶することができる。駆動電子装置が、例えばさらなる較正、又はその用途のために次に動作する際に、この調整済みの駆動パラメータを駆動電子装置が使用することができる。
【0047】
特定の概念を説明するために特定の方法650を示し、これについて説明したが、本発明の範囲はこの特定の方法に限定されるものではない。代替の実施形態では、いくつかの動作をこの方法から任意に省き、及び/又はこの方法に追加することができる。例えば、ブロック654における判定を任意に省くことができる。このような判定を行わずに、方法の1又はそれ以上の所定の回数の反復を任意に行うことができ、この回数も任意に構成可能である。別の例として、ブロック604とブロック656との間に調整及び/又は調整の量を任意に計算することができる。計算された調整は、任意にシミュレーション、コンピュータモデル、又は最適化モデルに基づくものであってよく、この調整は駆動信号の較正を迅速に実行しがちな可能性がある。その他の修正及び/又は適合も可能であり、当業者及び本開示を利用できる人々にはこれらが明らかであろう。
【0048】
図7は、本発明の1又はそれ以上の実施形態によるピクセル位置の較正方法760のブロックフロー図である。ブロック702において、走査ビーム装置を使用して較正パターンの画像を取得することができる。これは、ほぼ前述したように行うことができる。駆動信号の較正が事前に行われている場合、調整済みの駆動パラメータを使用して走査パターン内の較正パターン上でビームを走査することにより画像を取得することができる。駆動信号の較正に使用したのと同じ較正パターン、或いは全く異なる(潜在的にピクセル位置の較正により適した)較正パターンを使用することができる。或いは、駆動信号の較正が行われていない場合、始動/初期駆動パラメータを使用することができる。
【0049】
次に、ブロック704において、取得した画像を較正パターンの表示と比較することができる。この比較は、ほぼ前述したように行うことができる。
【0050】
ブロック762において、比較に関連する較正済みの画像位置情報を決定して(例えば、走査ビーム装置のメモリ内に)記憶又は別様に保存することができる。本発明の1又はそれ以上の実施形態では、米国特許出願第20060072843号に記載される前述の構成メモリに較正データを記憶することができるが、これは必須ではない。
【0051】
本発明の1又はそれ以上の実施形態では、較正済みの画像位置情報は、走査中のそれぞれの時点に関する較正済みの宛先ピクセルの位置を含むことができる。較正済みの宛先ピクセルの位置は、取得した画像と較正パターンの表示との間の差異により、及び/又は取得した画像の点又は特徴を対応する較正パターンの表示内の既知の座標に写像することにより、間接的に推測される予想されるビームの位置ではなく、実際のビームの位置を表示又は推定するように試みることができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、この情報は、例えば予想されるビームの位置からの方向のずれ又は変位を含むことができる。さらに別の選択肢として、この情報は、宛先ピクセルの位置及びずれ又は変位の両方の組合せを含むことができる。このようなピクセル位置の較正は、機械的共鳴周波数又はその付近における動作に起因する歪み、又は駆動信号の較正後に残留しがちな可能性のあるその他の歪みを除去し、或いは少なくとも減少させるのに役立つことができるという利点がある。
【0052】
特定の概念を説明するために特定の方法760を示し、これについて説明したが、本発明の範囲はこの特定の方法に限定されるものではない。代替の実施形態では、この方法に任意にいくつかの動作を追加することができる。例えば、この方法を1又はそれ以上の回数任意に反復して、較正済みの画像ピクセル又はその他の位置情報を微調整することができる。別の例として、複数の画像を取得して比較し、保存されている較正データを統計的に平均化することができる。その他の修正及び/又は適合も可能であり、当業者及び本開示を利用できる人々にはこれらが明らかであろう。
【0053】
走査ビーム装置を使用して、モノクロ画像、カラー画像、又はこれらの両方を生成することができる。走査ビーム装置を別の方法で較正してカラー画像を生成することも可能である。
【0054】
本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正してカラー画像を生成する1つの方法は、モノクロ較正パターンを使用するステップを含む。モノクロ較正パターン上で色の異なる光のビームを走査することにより、異なるモノクロ較正パターンの画像を取得することができる。1又はそれ以上の実施形態では、異なる色の光として赤色、緑色、及び青色光を含むことができるが、本発明の範囲はこれらに限定されるものではない。色の異なる光の各々に関して後方散乱光を検出することができる。パターンの黒色部分は、色の異なる各々の光の大部分を吸収しがちな可能性があり、一方白色部分は、色の異なる各々の光の大部分を反射しがちな可能性がある。
【0055】
異なる取得した画像の各々を、モノクロ較正パターンの表示と比較することができる。例えば、色収差が存在するようないくつかの場合には(レンズが色収差を加えがちな可能性がある)、異なる色の各々が表示と異なる場合がある。従って、本発明の1又はそれ以上の実施形態では、走査ビーム装置は、異なる色の光の各々に異なる量だけ較正を行うことができる。色収差が存在する場合、このことが、色収差の視覚的影響を減少させるのに役立つことができる。
【0056】
色の異なる光の較正データを保存する別の方法も可能である。本発明の1又はそれ以上の実施形態では、走査中の複数の時点の各々に関する異なる宛先ピクセルの位置を、色の異なる光の各々について保存することができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、走査中の複数の時点の各々に関する宛先ピクセルの位置を、(赤色光などの)着色光の1つに関して記憶することができ、これらの記憶された宛先ピクセルの位置からの潜在的に異なるずれを、(緑色光及び青色光などの)残りの異なる着色光に関して時間の各々について記憶することができる。
【0057】
本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正してカラー画像を生成する別の方法は、多色較正パターンを使用するステップを含む。多色較正パターン上で(白色光などの)多色光を走査し、後方散乱光を色成分に分離し、この色成分を検出することにより、多色較正パターンの異なる画像を取得することができる。次に、異なる色成分の画像の各々を対応する較正パターンの色成分と比較することができる。異なる着色光に関する較正データを、前節で説明したように、或いは別様に保存することができる。
【0058】
本明細書で説明するような較正を、潜在的に異なる時点で、また潜在的に異なる実体により行なうことができる。図8は、本発明の1又はそれ以上の実施形態による、走査ビーム装置を較正する方法870の1つの特定例のブロックフロー図である。
【0059】
ブロック872において、本明細書で説明するような駆動信号の較正を行うことができる。本発明の1又はそれ以上の実施形態では、製造業者又はその他の第1の実体が、ブロック872の駆動信号の較正を行うことができる。次に、部分的に較正済みの走査ビーム装置を購買者、ユーザ、又は第2の実体に販売し、引渡し、又は別様に移送することができる。ブロック874において、本明細書で説明するようなさらなる駆動信号の較正を任意に行うことができる。製造環境及び使用環境において走査ビーム装置の駆動に使用される駆動システムは潜在的に異なるので、このことは、走査ビーム装置を例えば特定の駆動システムなどの特定の使用環境に対してカスタマイズするのに役立つことができる。次に、ブロック875において、本明細書で説明するようなピクセル位置の較正を行うことができる。破線873を使用して、例えば装置の製造業者などの第1の実体が走査ビーム装置の較正の一部を行うことができ、また例えば購買者及び/又はユーザなどの第2の実体が較正の第2の部分を行うことができることを示している。
【0060】
代替の実施形態も可能である。一例として、第2の実体は、さらなる駆動信号の較正を行わずにピクセル位置の較正を行うことができる。別の例として、第1の実体は、駆動信号の較正を行った後にピクセル位置の較正を行うことができ、また第2の実体は、さらなる駆動信号の較正及び/又はピクセル位置の較正を行うことができる。さらに、例えば歪みが検出された場合又は大きくなった場合、定期的メインテナンスにより、或いはその他の公知の基準により新しい装置を使用する場合などのその他の時に、本明細書で説明するような様々な種類の較正を行うことができる。
【0061】
図9は、本発明の1又はそれ以上の実施形態による、関心のある面の画像を取得する方法976のブロックフロー図である。本発明の1又はそれ以上の実施形態では、例えば走査ビーム装置が、患者の体内へ挿入される内視鏡又はその他の医療用具である場合、走査ビーム装置を体内に進入させ、例えば体組織、体腔、中空器官、又は同様の関心のある面などの目標面に隣接して位置付けることができ、その後目標面の画像を取得することができる。しかしながら、バーコード及びその他の表面などの他の面も適しているので、本発明の範囲は上記のような面に限定されるものではない。
【0062】
ブロック977において、走査パターンの関心のある面上でビームを走査することができる。1又はそれ以上の実施形態では、本明細書で説明するように決定された較正済み駆動パラメータを使用することができる。或いは、始動/初期駆動パラメータを使用することができる。ブロック978において、走査パターン中の異なる時点において後方散乱光を検出することができる。次に、ブロック979において関心のある面の画像を生成することができる。本発明の1又はそれ以上の実施形態では、画像を生成するステップは、走査パターン中の複数の異なる時点の各々において検出される後方散乱光を、生成した画像内の対応する較正済み宛先画像の位置に置く又は表すステップを含むことができる。前述したように、本発明の1又はそれ以上の実施形態では、較正済み宛先画像の位置は、走査中のそれぞれの時点に関する宛先ピクセルの位置を含むことができる。別の選択肢として、上記と同様に、或いは別様にずれ又は変位を使用することもできる。宛先ピクセルの位置及び/又はずれは、取得した画像と較正パターンの表示との間の差異により、間接的に推測される予想されるビームの位置ではなく、実際のビームの位置を表示するように試みることができる。
【0063】
画像を表示するための類似の実施形態も可能である。本明細書で説明するように決定した較正済み駆動パラメータを走査中に使用することができる。本明細書で説明するように決定した較正済み画像の位置に変調光を置き、或いは表すことができる。
【0064】
図10A〜図10Fは、本発明の様々な実施形態による適当な較正パターンの例である。図10Aは、均等に離間した水平線と垂直線との格子、直径が一定間隔で増大する8つの同心円、同心円の中心で交差する対角線、及び左上隅にある基準の+印を含む較正パターンである。
【0065】
図10Bは、均等に離間した水平線と垂直線との格子から成る較正パターンである。傾斜付き格子又は異なる離間距離の格子を含むその他の様々な較正パターンも可能である。
【0066】
図10Cは、中央で交差する1対の水平線と垂直線及び8つの点から成る較正パターンである。8つの点は、4つの象限の各々の中に対角線に沿って2つの点が置かれる。異なる個数及び配置の点及び線を含むその他の様々な較正パターンも可能である。
【0067】
図10Dは、同一サイズの9つの小円の規則的なマトリックスから成る較正パターンであり、円の1つが内部に十字形のような識別マークを有する。較正に使用できる属性として、取得した画像内の円の個数とサイズとが含まれる。識別可能にマークを付けた円は向きを定めることができる。
【0068】
図10Eは、人の線画から成る較正パターンである。その他の様々な較正パターンとして、動物、物体、景色、及びその他の様々な主題を含むことができる。
【0069】
図10Fは、輪郭線で表す文字Aから成る較正パターンである。潜在的にその他の対象物を有するその他の文字、数字、及びこれらの組合せも適している。
【0070】
これら特定の較正パターンは例示に過ぎない。その他の適当な較正パターンとして、点又は線の抽象グループから幾何学的形状、非幾何学的形状、物体、絵文字、画像、写真、美術品、及びこのようなパターンの組合せに至るまでの様々な異なるパターンを含むことができる。本明細書で開示する1又はそれ以上の較正を行うために使用できるほとんどいずれのパターンも使用することができる。従って、「較正パターン」という用語は、広く解釈すべきである。
【0071】
特定の概念をさらに説明するために、図10Aに示す較正パターンを較正に使用できるいくつかの例示的方法について検討されたい。この較正パターンは、取得した画像と比較し、較正に使用することのできる様々な所定の特徴又は特性を有する。
【0072】
1つの特性は円の個数である。この較正パターンは8つの同心円を有する。取得した画像内に現れる円が8つ未満の場合、例えば(x軸及びy軸電圧などの)駆動信号を調整して走査の大きさを調整することができる。
【0073】
別の特性は円のサイズである。一例として、取得した画像内の全ての円が較正パターン内の全ての円よりも小さい場合、駆動信号を調整して走査の大きさを調整することができる。或いは、大きな外側の円は正しいサイズであるが、小さな内側の円が小さ過ぎる場合、電圧ランプ/上昇の変化を使用して螺旋径のより均一な増加率を促進することができる。
【0074】
さらに別の特性は円の形状である。場合によっては、円は楕円であってもよい。円形度の欠如に関する1つの潜在的な測定基準は、最大及び最小半径の比の1(数値の1)からの偏差値である。円がどれほど丸いかを判定する1つの方法は、円の最大及び最小半径の比の1からの偏差値を判断するステップを含む。取得した画像内で円が水平方向の楕円として現れる場合、x軸電圧に対してy軸電圧を下げることができる。或いは、取得した画像内で円が垂直方向の楕円として現れる場合、y軸電圧に対してx軸電圧を下げることができる。
【0075】
同様に、さらに別の特性は均等な間隔の水平線及び垂直線である。取得した画像において水平線間の間隔が垂直線間の間隔よりも大きい場合、この画像は真に円形の走査パターンではなく、垂直楕円形状の走査パターンを表している可能性がある。このような場合には、一例として、x軸電圧に対してy軸電圧を下げることができる。
【0076】
これらは、取得した画像の表示との比較を使用して駆動パラメータを調整できるわずかな例示的方法を提供するものである。その他の数多くの方法も可能であり、それらの方法がこれまでに使用されてきた。当業者及び本開示を利用できる人々であれば、使用できる異なる種類の較正パターン及び調整に使用できる較正パターンの特徴の関連する異なる比較に大きな柔軟性があることを理解するであろう。
【0077】
図2に示すように、走査ビーム装置は、本明細書に開示されるような1又はそれ以上の較正を実行できる較正システム230を含むことができる。図11は、本発明の1又はそれ以上の実施形態による、走査ビーム装置のための例示的な較正システム1130のさらなる詳細を示すブロック図である。
【0078】
この較正システムは比較論理回路1184を含む。比較論理回路は、本明細書の他の箇所で開示したように、較正パターン1186の表示を較正パターンの取得した画像1190と比較することができる。
【0079】
前述したように、較正パターンの表示は、較正パターンの電子画像又はその他の電子的類似物、或いは(円の個数、円のサイズなどの)較正パターンの特徴又は特性セットを含むことができる。一例として、表示と取得した画像とにメモリからアクセスし、或いは比較論理回路がこれらを別様に受け取り、或いは参照することができる。さらに別の選択肢として、表示は、走査ビーム装置には記憶されずに、実行者の考え又は心の中に記憶される心的表示であってもよい。
【0080】
図示のように、本発明の1又はそれ以上の実施形態では、(記憶されているか、或いは記憶されていないかにかかわらず)1又はそれ以上の追加の異なる表示1188を任意に使用することもできる。一例として、異なる表示は、異なる較正パターンの表示、走査の大きさが異なる同じ較正パターンの表示、又は異なる温度又はその他の環境条件下における同じ較正パターンの表示であってもよい。1つの態様では、複数の較正パターンを潜在的に使用して、例えば異なるパターンで、異なる程度の難しさで、単一の異なる駆動パラメータで、単一の異なる色成分で、などの異なる方法で走査ビーム装置を促すことができる。異なる表示を異なる温度に使用することができ、或いは例えば米国特許出願第______号に開示されるように、走査光学素子の温度をほぼ一定に維持することができる。同様に、異なる走査の大きさ、異なる環境条件などに関する異なる較正データのセットを記憶することができ、またこれらのセット間に挿入して走査の大きさ又は環境条件の連続スペクトルを提供する能力を任意に含めることができる。
【0081】
較正システムは、駆動信号較正論理回路1192及びピクセル位置較正論理回路1194も含む。これらの論理回路の各々は比較論理回路と結合され、或いは別様に通信する。本明細書の他の箇所で開示したように、駆動信号較正論理回路及びピクセル位置較正論理回路は、それぞれ駆動信号の較正及びピクセル位置の較正を行うことができる。具体的には、駆動信号較正論理回路は、1又はそれ以上の較正済み駆動パラメータ1196を決定することができる。これらの駆動パラメータを駆動電子装置に提供して後で使用することができる。1又はそれ以上の実施形態では、米国特許出願第20060072874号に開示されるような構成メモリに較正済み駆動パラメータを記憶することができるが、これは必須ではない。ピクセル位置較正論理回路は、1又はそれ以上の構成済みピクセル又はその他の画像位置1198を決定し、記憶又は別様に保存することができる。その後の画像生成中に、これらの較正済みピクセル又はその他の画像位置1198を画像生成器に提供することができ、或いは画像生成器がこれらにアクセスすることができる。
【0082】
本発明の1又はそれ以上の実施形態では、較正システムの論理回路は、例えば走査ビーム装置のメモリに記憶され、コントローラ、プロセッサ、又はその他の回路が実行できる一連の命令又はコードモジュールなどのソフトウェアを含むことができる。例えば、これらのモジュールとして、比較モジュール、駆動信号較正モジュール、及びピクセル位置較正モジュールを含むことができる。別の選択肢として、本発明の1又はそれ以上の実施形態では、較正システムの論理回路は、例えば特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)、又はその他の回路などのハードウェアを含むことができる。さらに別の選択肢として、較正システムの論理回路は、ソフトウェアとハードウェアとの組合せを含むことができる。
【0083】
図12は、本発明の実施形態を実行できる例示的な走査ビーム装置1210のブロック図である。この走査ビーム装置は、ベースステーション1201と走査ビームプローブ1203とを含む2部形状因子を有する。このような2部形状因子は、内視鏡及びその他の医療用プローブ器具に好適な傾向にある。2部形状因子の1つの潜在的利点は、ベースステーション内に高価な及び/又は大きな構成要素を含むことができ、プローブを比較的安価に及び/又は小型にすることができるという点である。別の潜在的利点は、同じベースステーションが異なる種類のプローブを潜在的に使用でき、例えば清掃、メインテナンス、又は廃棄するためにプローブを取り外せるという点である。しかしながら、この二部形状因子は必須ではない。
【0084】
ベースステーションは、光源1212、電源1205、及びメモリ1209を含む。本発明の1又はそれ以上の実施形態では、メモリを使用して、本明細書に開示するような較正システムの少なくとも一部を実現するとともに別個のプロセッサ(図示せず)又はその他の回路が実行できるコードモジュールを記憶することができる。ベースステーションは任意の光検出器1224を含む。或いは、光検出器を走査ビームプローブ内に配置することもできる。ベースステーションは任意のユーザインターフェース1211を含む。ユーザインターフェースとして、少数のボタン、ダイヤル、キーボード、又は当業で公知の同様のインターフェースを含むことができる。ベースステーションは任意のディスプレイ1213も含む。別の選択肢として、ディスプレイをベースステーションから切り離して含み、或いは省略することができる。
【0085】
走査ビームプローブは走査光学素子1214を含む。本発明の1又はそれ以上の実施形態では、走査光学素子は、光ファイバ又は同様の導波管の単一の片持ち状の自由端部、圧電管、又は光ファイバ又は導波管を動かすためのその他のアクチュエータ管を含むことができる。このような走査光学素子の詳細な例を図13に示すとともにこの図と併せて説明を行う。或いは、電気活性ポリマー(EAP)材料、磁気アクチュエータ、電磁アクチュエータ、静電アクチュエータ、音波アクチュエータ、電気音響変換器、(MEMSなどの)電気機械アクチュエータ、又はその他の種類のアクチュエータを使用して光ファイバ又は導波管を動かすことができる。
【0086】
別の選択肢として、本発明の1又はそれ以上の実施形態では、走査光学素子は、光ビームの光路内の鏡又はその他の反射装置と、反射装置を動かすためのアクチュエータとを含むことができる。さらに別の選択肢として、走査光学素子は、アクチュエータが動かすことのできるレンズ又はその他の焦点調整装置を含むことができる。さらに別の選択肢として、走査光学素子は、検流計、互いに動く複数の光学素子など、及びこれらの組合せを含むことができる。これらの様々な走査光学素子を図2の装置において使用することもできる。
【0087】
走査ビームプローブは、ベースステーションのコネクタインターフェース1221と嵌合するように構成されたコネクタ部材1219を含む。コネクタ部材をコネクタインターフェースに結合することにより、ベースステーションと走査ビームプローブとの間に電気及び光学経路を作り出すことができる。一例として、電気経路は、電力経路と駆動信号経路とを含むことができ、また光学経路は、照明経路と潜在的に検出経路とを含むことができる。1又はそれ以上のケーブル1223を介してこれらの経路を伝えることができる。
【0088】
図示のように、走査ビームプローブは、任意の不揮発性(N−V)メモリ1217を含むことができるが、これは必須ではない。本発明の1又はそれ以上の実施形態では、不揮発性メモリをコネクタ部材内に配置することができる。不揮発性メモリを使用して、本明細書に開示するような較正済みの駆動パラメータ及び/又は較正済みの画像位置情報を記憶することができるが、これは必須ではない。
【0089】
図示のように、本発明の1又はそれ以上の実施形態では、走査ビーム装置のベースステーションは、任意の較正チャンバ1215を含むことができる。較正チャンバは、内部に1又はそれ以上の較正パターンを有することができる。このことは、1又はそれ以上の較正パターンを汚れ、風化、又はその他の損傷から保護するのに役立つことができる。較正チャンバはまた、較正パターンを見るための制御された光環境を提供するのにも役立つことができる。1つの態様では、較正チャンバは制御された温度を有することができ、これとは別にプローブは独立してほぼ一定の温度を維持することができる。本発明の1又はそれ以上の実施形態では、ベースステーションは、いくつかの較正パターン間で切り換えを行うための手段を有することができる。例えば、機械的な機構が、1つの較正パターンを別の較正パターンと置き換えることができる。較正チャンバはポートを有することができ、較正中、このポートに走査ビームプローブを結合することができる。このような結合は、走査ビームプローブを較正パターンに対して正確かつ着実に位置付けるのに役立つことができる。或いは、較正チャンバを任意に省略して、別個の製造装置又はその他の場所に含めることもできる。
【0090】
図13は、本発明の1又はそれ以上の実施形態による走査ファイバプローブ1303の詳細例の断面側面図である。この例は、本発明を限定するものではなく、例示にすぎないと解釈すべきである。この図示の特定のプローブは、患者の体内に挿入される内視鏡又はその他の比較的小さな器具又はプローブとしての使用によく適しているが、その他の実施構成では、プローブの設計及び動作を大幅に変更することができる。
【0091】
このプローブはハウジング1331を含む。ハウジングは、ステンレス鋼又は患者の体内に展開するのに適したその他の材料を含み、気密シールすることができる。ハウジングは小型又は微小であってもよい。例えば、本発明の1又はそれ以上の実施形態では、ハウジングは概ね管状であり、約5mm以下の直径又はその他の断面寸法と約20mm以下の長さとを有することができる。
【0092】
ハウジング内に光ファイバ1335の自由端部1333が含まれる。ハウジング内には圧電管1337も含まれる。この圧電管は、1つの考えられる種類のアクチュエータ管を表すものである。本発明の1又はそれ以上の実施形態では、圧電管はPZT5A材料を含むことができるが、これは必須ではない。光ファイバは、圧電管のほぼ円筒状の開口部を通じて挿入される。取付けカラー1339が、圧電管をハウジングに結合することができる。取付けカラーを貫通したしっかりと適合する概ね円筒状の開口部を通じて圧電管を挿入することができる。
【0093】
数多くのワイヤ又はその他の導電路1341が、ベースステーションからプローブの近位端まで延びる。導電路は、圧電管に電気信号を運ぶことができる。1又はそれ以上の実施形態では、圧電管は、光ファイバを二次元で動かすために、外面上に4つの象限金属電極1343を有することができる。4つの導電路の各々を圧電管上の4つの象限電極のそれぞれの1つにハンダ付け又は別様に電気的に結合することができる。これらの4つの導電路が駆動信号を圧電管へ運び、圧電管に光ファイバを、例えば拡大する螺旋状走査パターンで走査させることができる。1又はそれ以上の実施形態では、光ファイバを共鳴周波数で走査することができる。共鳴周波数では、駆動信号が光ファイバの位置に対して約90°位相ずれする可能性がある。1又はそれ以上の実施形態では、圧電管は、内面上に任意に接地電極を有することができる。任意に接地電極に1つの導電路を設けることができる。
【0094】
装置は1又はそれ以上のレンズ1345を含む。1又はそれ以上のレンズは、光ファイバの自由端部を通じて送られる光の光路内に置かれる。本発明の1又はそれ以上の実施形態では、1又はそれ以上のレンズとして、Pentax社製のレンズを含むことができる。或いは、任意にその他のレンズを使用することもできる。
【0095】
本発明の1又はそれ以上の実施形態では、目標面からの後方散乱光を回収するために、ハウジングの外部周辺に光ファイバ1347を含むことができる。一例として、フルカラー走査ファイバ内視鏡という特定の場合には、ハウジングの外部周辺に光を回収するための12本の光ファイバを含むことができる。光ファイバは、光を回収し、プローブの近位端、又はベースステーション内、或いはその他の場所に位置する1又はそれ以上の光検出器へ戻すことができる。
【0096】
説明を目的として、上記の説明では、本発明の実施形態の完全な理解をもたらすために数多くの特定の詳細について説明した。説明した特定の実施形態は、本発明を限定するためではなく、本発明を説明するために提供したものである。これらの特定の詳細のいくつかを伴わずに、実施形態を実施することができる。さらに、本明細書で開示した実施形態に、例えば、実施形態の構成要素のサイズ、形状、構成、形態、機能、材料、動作の態様、並びに組み立て及び使用法に対して修正を施すことができる。図面に示し、本明細書で説明したものに対する全ての同等の関連物が、本発明の実施形態の範囲に含まれる。本発明の範囲は、上記に提供した特定の実施例によってではなく、以下の特許請求の範囲により決定されるべきである。さらに、図を通じて参照番号の末端部を適宜繰り返し、任意に同様の特性を有する可能性がある対応又は類似する要素を示した。
【0097】
様々な動作及び方法について説明した。基本的な形で方法について説明したが、これらの方法に様々な動作を任意に追加することができる。場合によっては、これらの方法からいくつかの動作を取り除くことができる。場合によっては、これらの方法の動作を異なる順序で行うこともできる。これらの方法に対して多くの修正及び適合を行うことができ、可能であり、企図することができる。
【0098】
ハードウェア構成要素により特定の動作を行うことができ、或いは機械実行可能命令の形で特定の動作を具現化することができ、これらを使用して、動作を実行する命令で回路をプログラムし、或いは少なくともこのような回路を作り出すことができる。回路は、ごくわずかな例を挙げれば、汎用又は専用プロセッサ、又は論理回路を含むことができる。ハードウェアとソフトウェアとの組合せにより、任意にこれらの動作を行うこともできる。
【0099】
ソフトウェア又はその他の命令を記憶した機械アクセス可能媒体及び/又は機械可読媒体を含むことができるプログラム製品又はその他の製造の物品として本発明の1又はそれ以上の実施形態を提供することができる。この媒体は、機械により実行された場合、本明細書に開示した1又はそれ以上の動作又は方法を実行する機械をもたらし、或いは機械にこのような1又はそれ以上の動作又は方法を実行させることができる命令を提供することができる。適当な機械として、以下に限定されるわけではないが、ごくわずかな例を挙げれば、走査ビーム装置、ベースステーション、内視鏡ベースステーション、医療機器、コンピュータシステム、及び1又はそれ以上のプロセッサを備えたその他の様々な装置が含まれる。
【0100】
媒体は、機械によりアクセス可能な種類の情報を記憶又は提供する機構を含むことができる。例えば、媒体として、フロッピー(登録商標)ディスケット、光学記憶媒体、光ディスク、CD−ROM、磁気ディスク、光磁気ディスク、読出し専用メモリ(ROM)、プログラム可能ROM(PROM)、消去及びプログラム可能ROM(EPROM)、電気的に消去及びプログラム可能ROM(EEPROM)、ランダムアクセスメモリ(RAM)、スタティックRAM(SRAM),ダイナミックRAM(DRAM)、フラッシュメモリ、及びこれらの組合せなどの記録可能及び/又は非記録可能媒体を任意に含むことができる。本発明の1又はそれ以上の実施形態では、1又はそれ以上の走査ビーム装置と使用するための命令とを含むキットに機械可読媒体を含む製造の物品を含めることができる。
【0101】
以下の特許請求の範囲では、「走査ビーム装置」、「走査光学素子」、「走査ビームプローブ」等における「走査」という用語は、特に明記しない限り、その機器又は装置が使用中であること、或いは現在走査中であることを意味するものではない。むしろ「走査」という用語は、その機器又は装置が走査可能であるということを意味しているに過ぎない。
【0102】
なお、本明細書を通じて、「1つの実施形態」、「実施形態」、又は「1又はそれ以上の実施形態」に対する言及は、例えば、本発明の実施に際して特定の特徴を含むことができることを意味するものであると理解されたい。同様に、本開示を簡素化し、様々な発明の態様の理解に役立てる目的で、説明において様々な特徴を単一の実施形態、図又はその説明にまとめた部分があることを理解されたい。しかしながら、本開示のこの方法について、本発明が、個々の請求項に明確に記載したよりも多くの特徴を必要とするという意図を反映したものであると解釈すべきではない。むしろ、以下の特許請求の範囲が示すように、発明の態様は、単一の開示した実施形態の全ての特徴よりも少ないものにより成立することができる。従って、詳細な説明に続く特許請求の範囲は、本明細書によりこの詳細な説明において明確に引用され、個々の請求項は、それ自体が本発明の独立した実施形態として成立するものである。
【符号の説明】
【0103】
100 走査ビーム装置の較正
102 走査ビーム装置を使用して較正パターンの画像を取得
104 取得した画像を較正パターンの表示と比較
106 比較に基づいて走査ビーム装置を較正
【特許請求の範囲】
【請求項1】
走査ビーム装置を使用して較正パターンの画像を取得するステップと、
前記取得した画像を前記較正パターンの表示と比較するステップと、
前記比較に基づいて前記走査ビーム装置を較正するステップと、
を含むことを特徴とする方法。
【請求項2】
前記走査ビーム装置を較正するステップは、前記比較に基づいて前記走査ビーム装置の走査光学素子の1又はそれ以上の駆動パラメータを調整するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記比較が、前記取得した画像と前記較正パターンの表示とがしきい値の許容範囲内で一致することを示すまで、前記取得ステップと前記比較ステップとを1又はそれ以上の回数反復するステップをさらに含む、
ことを特徴とする請求項2に記載の方法。
【請求項4】
前記走査ビーム装置を較正するステップは、前記比較に関連する較正済みの画像位置情報を保存するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項5】
前記較正済みの画像位置情報は較正済みの宛先ピクセル位置を含み、該宛先ピクセル位置は、前記取得した画像と前記表示との間の差異を考慮するように調整された予想されるピクセル位置である、
ことを特徴とする請求項4に記載の方法。
【請求項6】
走査パターン内の関心のある面上でビームを走査するステップと、
前記走査パターン中の異なる時点において後方散乱光を検出するステップと、
前記走査パターン中の前記異なる時点の各々において検出された前記後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、前記関心のある面の画像を生成するステップとをさらに含む、
ことを特徴とする請求項4に記載の方法。
【請求項7】
前記走査ビーム装置を較正するステップは、
前記比較に基づいて、前記走査ビーム装置の走査光学素子の1又はそれ以上の駆動パラメータを調整するステップと、
前記走査ビーム装置を使用して同じ又は異なる較正パターンの第2の画像を取得するステップと、
前記取得した第2の画像を、該第2の画像を取得するために使用した前記較正パターンの表示と比較するステップと、
前記比較に関連する較正済みの画像位置情報を保存するステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項8】
走査パターン内の関心のある面上でビームを走査するステップと、
前記走査パターン中の異なる時点において後方散乱光を検出するステップと、
前記異なる時間の各々において検出された前記後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、前記関心のある面の画像を生成するステップとをさらに含む、
ことを特徴とする請求項7に記載の方法。
【請求項9】
前記走査ビーム装置を使用して前記較正パターンの画像を取得するステップは、
前記走査パターン内の前記較正パターン上でビームを走査するステップと、
前記走査パターン中の異なる時点において前記較正パターンから後方散乱光を検出するステップと、
前記異なる時点の各々において検出された前記後方散乱光を、対応するそれぞれの時点に関する前記ビームの予想される位置で表すことにより、前記較正パターンの画像を生成するステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記較正パターンの画像を取得するステップは、多色較正パターンの多色画像を取得するステップを含み、比較ステップは、前記取得した多色画像の異なる色成分を、対応する前記較正パターンの表示の色成分と比較するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項11】
前記較正パターンの画像を取得するステップは、モノクロ較正パターンの複数の異なる色成分画像を取得するステップを含み、比較ステップは、前記複数の異なる色成分画像の各々を前記モノクロ較正パターンと比較するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項12】
前記画像を取得する前に、前記走査ビーム装置の走査ビームプローブを走査ビーム装置の較正チャンバのポートに結合するステップをさらに含み、前記較正チャンバは内部に前記較正パターンを有する、
ことを特徴とする請求項1に記載の方法。
【請求項13】
前記走査ビーム装置の較正後に、前記走査ビーム装置の走査ビームプローブを患者の体内に挿入するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項14】
前記較正パターンの画像を取得するステップは、単一の片持ち状の光ファイバをある走査パターンで走査するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項15】
前記較正パターンの画像を取得するステップは、走査光学素子をほぼ共鳴周波数で動かすステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項16】
前記取得した画像を前記較正パターンの表示と比較するステップは、前記取得した画像内の特徴を、対応する前記較正パターンの表示内の特徴の既知の座標に写像するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項17】
実行された場合、
走査ビーム装置で取得した較正パターンの画像を該較正パターンの表示と比較するステップと、
前記比較に基づいて前記走査ビーム装置を較正するステップと、
を含む機械実行動作をもたらす命令を与える機械アクセス可能媒体を含む、
ことを特徴とする製造の物品。
【請求項18】
実行された場合、前記比較に基づいて前記走査ビーム装置を較正する機械をもたらす前記命令は、実行された場合、前記比較に基づいて前記走査ビーム装置の走査光学素子の1又はそれ以上の駆動パラメータを調整するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項17に記載の製造の物品。
【請求項19】
実行された場合、前記比較に基づいて前記走査ビーム装置を較正する機械をもたらす前記命令は、実行された場合、前記比較に関連する較正済みの画像位置情報を記憶するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項17に記載の製造の物品。
【請求項20】
前記命令は、実行された場合、走査パターン内の前記関心のある面上でビーム走査中の複数の異なる時点の各々において検出された後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、関心のある面の画像を生成するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項19に記載の製造の物品。
【請求項21】
実行された場合、前記取得した画像を前記較正パターンの表示と比較する前記機械をもたらす前記命令は、実行された場合、前記取得した画像内の特徴を対応する前記較正パターンの表示内の特徴の既知の座標に写像するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項17に記載の製造の物品。
【請求項22】
光源と、
前記光源から光を受け取り、走査パターン内の較正パターン上でビームを走査するための走査光学素子と、
前記較正パターンから後方散乱される光を前記走査パターン中の異なる時点において検出するための光検出器と、
前記異なる時点の各々において検出された前記後方散乱光を、対応するそれぞれの時点に関する前記ビームの予想される位置で表すことにより、前記較正パターンの画像を生成するための画像生成論理回路と、
前記画像を前記較正パターンの表示と比較するための比較論理回路と、
を含むことを特徴とする装置。
【請求項23】
前記比較論理回路と通信し、前記比較に基づいて前記走査光学素子の1又はそれ以上の駆動パラメータを調整するための駆動信号較正論理回路をさらに含む、
ことを特徴とする請求項22に記載の装置。
【請求項24】
前記比較に関連する較正済みの画像位置情報を記憶するためのピクセル位置較正論理回路をさらに含む、
ことを特徴とする請求項22に記載の装置。
【請求項25】
前記ピクセル位置較正論理回路は、走査パターン内の前記関心のある面上でビーム走査中の複数の異なる時点の各々において検出された後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、関心のある面の画像を生成するための論理回路を含む、
ことを特徴とする請求項24に記載の装置。
【請求項26】
内部に前記較正パターンを有するチャンバをさらに含む、
ことを特徴とする請求項22に記載の装置。
【請求項27】
内視鏡を含む、
ことを特徴とする請求項22に記載の装置。
【請求項28】
前記走査光学素子は、単一の片持ち状の光ファイバを含む、
ことを特徴とする請求項22に記載の装置。
【請求項29】
前記走査光学素子は、ほぼ共鳴周波数で走査を行うようにされた、
ことを特徴とする請求項22に記載の装置。
【請求項30】
前記較正パターンは受動的である、
ことを特徴とする請求項22に記載の装置。
【請求項1】
走査ビーム装置を使用して較正パターンの画像を取得するステップと、
前記取得した画像を前記較正パターンの表示と比較するステップと、
前記比較に基づいて前記走査ビーム装置を較正するステップと、
を含むことを特徴とする方法。
【請求項2】
前記走査ビーム装置を較正するステップは、前記比較に基づいて前記走査ビーム装置の走査光学素子の1又はそれ以上の駆動パラメータを調整するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記比較が、前記取得した画像と前記較正パターンの表示とがしきい値の許容範囲内で一致することを示すまで、前記取得ステップと前記比較ステップとを1又はそれ以上の回数反復するステップをさらに含む、
ことを特徴とする請求項2に記載の方法。
【請求項4】
前記走査ビーム装置を較正するステップは、前記比較に関連する較正済みの画像位置情報を保存するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項5】
前記較正済みの画像位置情報は較正済みの宛先ピクセル位置を含み、該宛先ピクセル位置は、前記取得した画像と前記表示との間の差異を考慮するように調整された予想されるピクセル位置である、
ことを特徴とする請求項4に記載の方法。
【請求項6】
走査パターン内の関心のある面上でビームを走査するステップと、
前記走査パターン中の異なる時点において後方散乱光を検出するステップと、
前記走査パターン中の前記異なる時点の各々において検出された前記後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、前記関心のある面の画像を生成するステップとをさらに含む、
ことを特徴とする請求項4に記載の方法。
【請求項7】
前記走査ビーム装置を較正するステップは、
前記比較に基づいて、前記走査ビーム装置の走査光学素子の1又はそれ以上の駆動パラメータを調整するステップと、
前記走査ビーム装置を使用して同じ又は異なる較正パターンの第2の画像を取得するステップと、
前記取得した第2の画像を、該第2の画像を取得するために使用した前記較正パターンの表示と比較するステップと、
前記比較に関連する較正済みの画像位置情報を保存するステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項8】
走査パターン内の関心のある面上でビームを走査するステップと、
前記走査パターン中の異なる時点において後方散乱光を検出するステップと、
前記異なる時間の各々において検出された前記後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、前記関心のある面の画像を生成するステップとをさらに含む、
ことを特徴とする請求項7に記載の方法。
【請求項9】
前記走査ビーム装置を使用して前記較正パターンの画像を取得するステップは、
前記走査パターン内の前記較正パターン上でビームを走査するステップと、
前記走査パターン中の異なる時点において前記較正パターンから後方散乱光を検出するステップと、
前記異なる時点の各々において検出された前記後方散乱光を、対応するそれぞれの時点に関する前記ビームの予想される位置で表すことにより、前記較正パターンの画像を生成するステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記較正パターンの画像を取得するステップは、多色較正パターンの多色画像を取得するステップを含み、比較ステップは、前記取得した多色画像の異なる色成分を、対応する前記較正パターンの表示の色成分と比較するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項11】
前記較正パターンの画像を取得するステップは、モノクロ較正パターンの複数の異なる色成分画像を取得するステップを含み、比較ステップは、前記複数の異なる色成分画像の各々を前記モノクロ較正パターンと比較するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項12】
前記画像を取得する前に、前記走査ビーム装置の走査ビームプローブを走査ビーム装置の較正チャンバのポートに結合するステップをさらに含み、前記較正チャンバは内部に前記較正パターンを有する、
ことを特徴とする請求項1に記載の方法。
【請求項13】
前記走査ビーム装置の較正後に、前記走査ビーム装置の走査ビームプローブを患者の体内に挿入するステップをさらに含む、
ことを特徴とする請求項1に記載の方法。
【請求項14】
前記較正パターンの画像を取得するステップは、単一の片持ち状の光ファイバをある走査パターンで走査するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項15】
前記較正パターンの画像を取得するステップは、走査光学素子をほぼ共鳴周波数で動かすステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項16】
前記取得した画像を前記較正パターンの表示と比較するステップは、前記取得した画像内の特徴を、対応する前記較正パターンの表示内の特徴の既知の座標に写像するステップを含む、
ことを特徴とする請求項1に記載の方法。
【請求項17】
実行された場合、
走査ビーム装置で取得した較正パターンの画像を該較正パターンの表示と比較するステップと、
前記比較に基づいて前記走査ビーム装置を較正するステップと、
を含む機械実行動作をもたらす命令を与える機械アクセス可能媒体を含む、
ことを特徴とする製造の物品。
【請求項18】
実行された場合、前記比較に基づいて前記走査ビーム装置を較正する機械をもたらす前記命令は、実行された場合、前記比較に基づいて前記走査ビーム装置の走査光学素子の1又はそれ以上の駆動パラメータを調整するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項17に記載の製造の物品。
【請求項19】
実行された場合、前記比較に基づいて前記走査ビーム装置を較正する機械をもたらす前記命令は、実行された場合、前記比較に関連する較正済みの画像位置情報を記憶するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項17に記載の製造の物品。
【請求項20】
前記命令は、実行された場合、走査パターン内の前記関心のある面上でビーム走査中の複数の異なる時点の各々において検出された後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、関心のある面の画像を生成するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項19に記載の製造の物品。
【請求項21】
実行された場合、前記取得した画像を前記較正パターンの表示と比較する前記機械をもたらす前記命令は、実行された場合、前記取得した画像内の特徴を対応する前記較正パターンの表示内の特徴の既知の座標に写像するステップを含む前記機械実行動作をもたらす命令をさらに含む、
ことを特徴とする請求項17に記載の製造の物品。
【請求項22】
光源と、
前記光源から光を受け取り、走査パターン内の較正パターン上でビームを走査するための走査光学素子と、
前記較正パターンから後方散乱される光を前記走査パターン中の異なる時点において検出するための光検出器と、
前記異なる時点の各々において検出された前記後方散乱光を、対応するそれぞれの時点に関する前記ビームの予想される位置で表すことにより、前記較正パターンの画像を生成するための画像生成論理回路と、
前記画像を前記較正パターンの表示と比較するための比較論理回路と、
を含むことを特徴とする装置。
【請求項23】
前記比較論理回路と通信し、前記比較に基づいて前記走査光学素子の1又はそれ以上の駆動パラメータを調整するための駆動信号較正論理回路をさらに含む、
ことを特徴とする請求項22に記載の装置。
【請求項24】
前記比較に関連する較正済みの画像位置情報を記憶するためのピクセル位置較正論理回路をさらに含む、
ことを特徴とする請求項22に記載の装置。
【請求項25】
前記ピクセル位置較正論理回路は、走査パターン内の前記関心のある面上でビーム走査中の複数の異なる時点の各々において検出された後方散乱光を、前記較正済みの画像位置情報内に定められた画像位置で表すことにより、関心のある面の画像を生成するための論理回路を含む、
ことを特徴とする請求項24に記載の装置。
【請求項26】
内部に前記較正パターンを有するチャンバをさらに含む、
ことを特徴とする請求項22に記載の装置。
【請求項27】
内視鏡を含む、
ことを特徴とする請求項22に記載の装置。
【請求項28】
前記走査光学素子は、単一の片持ち状の光ファイバを含む、
ことを特徴とする請求項22に記載の装置。
【請求項29】
前記走査光学素子は、ほぼ共鳴周波数で走査を行うようにされた、
ことを特徴とする請求項22に記載の装置。
【請求項30】
前記較正パターンは受動的である、
ことを特徴とする請求項22に記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11】

【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図11】
【図12】
【図13】
【公開番号】特開2013−65020(P2013−65020A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2012−222357(P2012−222357)
【出願日】平成24年10月4日(2012.10.4)
【分割の表示】特願2009−545530(P2009−545530)の分割
【原出願日】平成19年4月20日(2007.4.20)
【出願人】(502457803)ユニヴァーシティ オブ ワシントン (93)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成24年10月4日(2012.10.4)
【分割の表示】特願2009−545530(P2009−545530)の分割
【原出願日】平成19年4月20日(2007.4.20)
【出願人】(502457803)ユニヴァーシティ オブ ワシントン (93)
【Fターム(参考)】
[ Back to top ]