
遮断機
【課題】遮断動作の正常、異常、特に異常を、設置現場で確認し得る遮断機を提供する。
【解決手段】サーボモータ駆動部3は、制御部31と、設定部33と、表示部35、37とを含む。制御部31は、少なくとも、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及びサーボモータ1の停止位置を制御する。設定部33は、電流の制限値、下降動作時間及び停止位置を設定する。表示部35、37は、電流、下降動作時間、停止位置及びその正常・異常を表示するものであって、表示内容が視認できるように、ケースに配置されている。
【解決手段】サーボモータ駆動部3は、制御部31と、設定部33と、表示部35、37とを含む。制御部31は、少なくとも、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及びサーボモータ1の停止位置を制御する。設定部33は、電流の制限値、下降動作時間及び停止位置を設定する。表示部35、37は、電流、下降動作時間、停止位置及びその正常・異常を表示するものであって、表示内容が視認できるように、ケースに配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄道用電気踏切遮断機、更に、駐車場、有料道路における料金徴収所などのゲートに用いられる電気遮断機に関する。
【背景技術】
【0002】
この種の遮断機としては、遮断かんの昇降動作を、カムとスイッチとの組合せによって制御する方式の他、サーボモータを用い、サーボモータによって遮断かんの昇降動作を制御する方式のもが知られている(例えば特許文献1)。サーボモータを用いた遮断機は、遮断かんの下降時間を任意に設定できるという点で、カム・スイッチ方式の遮断機に優位する。
【0003】
しかし、従来のサーボモータを用いた遮断機は、機構的不具合及び電気的不具合等の異常が生じた場合、異常表示灯等で異常を報知する程度の簡単な異常報知構成に留まっていた。
【0004】
このため、異常を生じている個所を特定することが困難で、メーカが当該遮断機を正常な遮断機と交換し、交換によって取り外された遮断機を持ち帰って調査するという手法を採らざるを得なかった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−90033号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、動作の正常、異常、特に異常を設置現場で確認し得る遮断機を提供することである。
【課題を解決するための手段】
【0007】
上述した課題を解決するため、本発明に係る遮断機は、サーボモータと、サーボモータ駆動部と、ケースと、腕金具とを含む。前記サーボモータは、前記サーボモータ駆動部によってその回転が制御される。前記ケースは、前記サーボモータ及び前記サーボモータ駆動部を収納している。前記腕金具は、前記ケースの外部に配置され、遮断かんを支持し、前記サーボモータによって回転駆動される。
【0008】
前記サーボモータ駆動部は、制御部と、設定部と、表示部とを含んでいる。前記制御部は、少なくとも、前記サーボモータに供給される電流、前記サーボモータの下降動作時間、及び、前記サーボモータの停止位置を制御する。前記設定部は、前記電流の制限値、前記下降動作時間及び前記停止位置を設定する。前記表示部は、前記電流、前記下降動作時間、前記停止位置及びその正常・異常を表示するものであって、表示内容が視認できるように、前記ケースに配置されている。
【0009】
上述したように、本発明に係る遮断機では、サーボモータ駆動部によってその回転が制御されるサーボモータによって、遮断かんを支持する腕金具が回転駆動される。サーボモータは、その本質的な機能として、その回転速度、回転位置等を任意に制御することができる。したがって、サーボモータによって回転駆動される遮断かんの下降速度、下降動作時間及び停止位置も、任意に制御することができる。
【0010】
サーボモータ駆動部は、制御部と、設定部とを含む。制御部は、少なくとも、サーボモータに供給される電流、サーボモータの下降動作時間、及び、サーボモータの停止位置を制御する。設定部は、電流の制限値、下降動作時間及び停止位置を設定する。サーボモータは、通常、位置検出器及び速度検出器を有していて、制御部は位置検出器及び速度検出器から得られた情報により、現在位置信号及び現在速度信号と、設定部によって設定された目標値とを比較する。差がある場合は、サーボモータを目標値との差分を減少させる方向に動かす。こうして、設定値と目的位置との差分は減少していく。この手順が、最終的に目的値に到達するか、許容範囲に入るまで続けられる。別の方法としてサーボモータの位置をデジタル的に記録しておき、目標値までの差分を与えて、目標値に一気に到達させる方法であってもよい。
【0011】
本発明においては、サーボモータ駆動部は、更に、表示部を備えている。表示部は、サーボモータに供給される電流、サーボモータの下降動作時間、及び、その正常・異常を表示する。これらの情報は、制御部から供給される。表示部は、表示内容が視認できるように、ケースに配置されている。したがって、サーボモータの動作状態の正常、異常、即ち、遮断かんの動作状態の正常、異常を、当該遮断機の設置現場で知ることができる。
【発明の効果】
【0012】
以上述べたように、本発明によれば、動作の正常、異常、特に異常を設置現場で確認し得る遮断機を提供することができる。
【図面の簡単な説明】
【0013】
【図1】図1〜図4に示した遮断機の電気的な構成を示すブロック図である。
【図2】本発明に係る遮断機の側面図である。
【図3】図2に示した遮断機の前蓋を取り除いた状態を示す正面図である。
【図4】図3に図示されたサーボモータ駆動部を示す図である。
【図5】図4に示したサーボモータ駆動部に含まれる制御部及び表示部の構成を示す図である。
【発明を実施するための形態】
【0014】
図1〜図5を参照すると、本実施の形態に係る遮断機は、サーボモータ1と、サーボモータ駆動部3と、ケース5と、腕金具7とを含む。サーボモータ1は、サーボモータ駆動部3によってその回転が制御される。サーボモータ1は、周知のように、位置、速度等を制御する用途に使用されるもので、ACサーボモータ、 DCサーボモータが知られている。何れのタイプを用いてもよいが、遮断機では、電源環境の観点から、多くの場合、DC電源用のサーボモータが用いられる。サーボモータ1の動作をフィードバックFbするために、サーボモータ1には、その回転位置、速度を検出する検出器11が付設される。位置の検出器11の代表例は、レゾルバであるが、その他、インクリメンタル・エンコーダ、アブソリュート・エンコーダ、ポテンショメータ等を用いてもよい。もっとも、インクリメンタル・エンコーダのように絶対位置情報を持たない検出器は、起動時に原点角度に復帰する必要がある。速度の検出器11としては、タコジェネレータが、一般に用いられる。
【0015】
ケース5は、サーボモータ1及びサーボモータ駆動部3を収納するものであって、図2に図示するように、本体部51と前蓋部53とを有しており、前蓋部53は、ヒンジ55等を用いて、本体部51の前面に開閉可能に取り付けられている。本体部51の裏側の外部には、腕金具7が取り付けられている。この腕金具7は、遮断かん9を支持するものであって、サーボモータ1に連結されている回転軸71の一端に固定されている。したがって、腕金具7は、回転軸71を介して、サーボモータ1によって回転駆動される。
【0016】
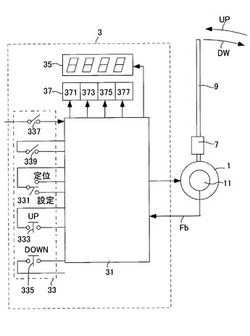
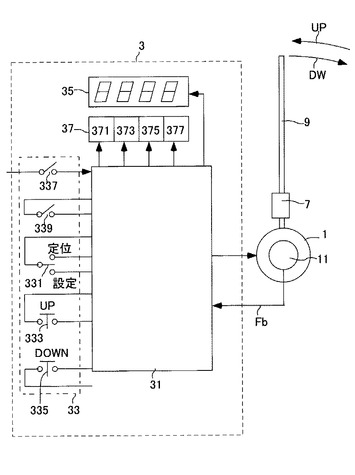
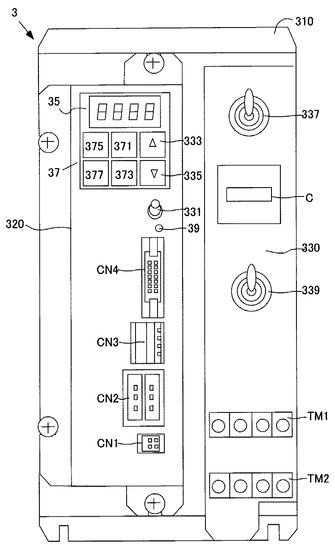
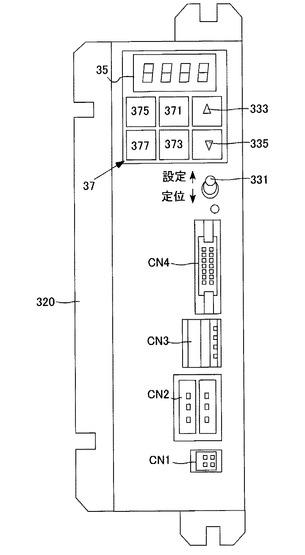
サーボモータ駆動部3は、図1に図示するように、制御部31と、設定部33と、表示部35、37とを含んでいる。これらは、シャーシ310,320,330に取り付けられている。シャーシ310とシャーシ330は板金一体構造になっている。制御部31は、少なくとも、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及び、サーボモータ1の停止位置を制御するもので、サーボアンプ、シーケンサなどを備える。制御部31は、検出器11から得られた情報により、現在位置信号と目的位置を比較する。そこで差がある場合、サーボモータ1を目的位置との差分を減少させる方向に動かす。こうして目的位置との差分は減少していく。
【0017】
設定部33は、電流の制限値、下降動作時間及び停止位置を設定する他、異常履歴を表示する。実施の形態において、トグル・スイッチ331の操作によって、「定位」及び「設定」の切替え操作ができるようになっている。トグル・スイッチ331は、通常動作時には、「定位」の位置にあり、各種の設定が必要になったときに、「設定」の位置に切り替えられる。
【0018】
表示部35、37は、表示内容が視認できるように、ケース5に配置されている。実施の形態では、前蓋部53を開いた時に、すぐに視認できる位置に配置されている。
【0019】
表示部35、37のうち、表示部35は、例えば、7セグメントLEDを用いた4ケタのデジタル表示方式であって、トグル・スイッチ331が「定位」の位置にあるとき、サーボモータ1の負荷率、トグル・スイッチ331の「設定」状態、停止位置、下降動作時間、制限電流値、異常履歴等が、この表示部35に表示される。
【0020】
表示部37は、トグル・スイッチ331が「設定」の位置にあるとき、制限電流、下降時間、位置調整、及び、異常履歴表示を実行していることを表示する。制限電流の設定表示に当たっては、シート・スイッチ333,335を操作して、制限電流表示部371を選択するとともに、サーボモータ1に通電する電流の制限値を、例えば、7A、11Aのように設定し、その設定値を、表示部35に表示して確認する。下降時間の設定も同様であって、シート・スイッチ333,335を操作して、下降時間表示部373を選択するとともに、遮断かん9下降動作の時間を、5.0秒、6.0秒、7.0秒、8.0秒等のように、段階的に設定し、これを表示部35に表示して確認する。
【0021】
位置調整に当たっては、シート・スイッチ333,335を操作して、位置調整表示部375を選択するとともに、サーボモータ1の停止位置(角度)を、表示部35に設定表示する。異常履歴の表示に当たっては、シート・スイッチ333,335を操作して、異常履歴表示部377を選択し、表示部35に異常履歴を表示する。
【0022】
更に、実施の形態には、電源スイッチ337、制御動作時にオンとする制御スイッチ339、外部との接続に用いられるコネクタCN1〜CN4、表示用LED39、測定端子TM1、TM2及びカウンタC等が図示されている。
【0023】
上述したように、本発明に係る遮断機では、サーボモータ駆動部3によってその回転が制御されるサーボモータ1によって、遮断かん9を支持する腕金具7が回転駆動される。サーボモータ1は、その本質的な機能として、上述したように、その回転速度、回転位置等を任意に制御することができる。したがって、サーボモータ1によって、下降DW又は上昇LFの方向に回転駆動される遮断かん9の下降速度、下降動作時間及び停止位置も、任意に制御することができる。
【0024】
サーボモータ駆動部3は、制御部31と、設定部33とを含む。制御部31は、少なくとも、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及び、サーボモータ1の停止位置を制御する。設定部33は、電流の制限値、下降動作時間及び停止位置を設定する。サーボモータ1は、通常、位置検出器11及び速度検出器11を有していて、制御部31は、位置検出器及び速度検出器11から得られた情報により、現在位置信号及び現在速度信号と、設定部33によって設定された目標値とを比較する。差がある場合は、フィードバックFbにより、サーボモータ1を目標値との差分を減少させる方向に動かす。
【0025】
本発明においては、表示部35、37を備えており、表示部35、37は、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及び、その正常・異常を表示する。表示部35、37は、表示内容が視認できるように、ケース5に配置されている。したがって、サーボモータ1の動作状態の正常、異常、即ち、遮断かん9の動作状態の正常、異常を、当該遮断機の設置現場で知ることができる。
【0026】
本発明は、主として、鉄道用電気踏切遮断機を提供するものであるが、これに限定されず、駐車場、有料道路の料金徴収所などのゲートに用いられる電気遮断機にも適用することができる。
【0027】
以上、好ましい実施例を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の変形態様を採り得ることは自明である。
【符号の説明】
【0028】
1 サーボモータ
3 サーボモータ駆動部
5 ケース
7 腕金具
【技術分野】
【0001】
本発明は、鉄道用電気踏切遮断機、更に、駐車場、有料道路における料金徴収所などのゲートに用いられる電気遮断機に関する。
【背景技術】
【0002】
この種の遮断機としては、遮断かんの昇降動作を、カムとスイッチとの組合せによって制御する方式の他、サーボモータを用い、サーボモータによって遮断かんの昇降動作を制御する方式のもが知られている(例えば特許文献1)。サーボモータを用いた遮断機は、遮断かんの下降時間を任意に設定できるという点で、カム・スイッチ方式の遮断機に優位する。
【0003】
しかし、従来のサーボモータを用いた遮断機は、機構的不具合及び電気的不具合等の異常が生じた場合、異常表示灯等で異常を報知する程度の簡単な異常報知構成に留まっていた。
【0004】
このため、異常を生じている個所を特定することが困難で、メーカが当該遮断機を正常な遮断機と交換し、交換によって取り外された遮断機を持ち帰って調査するという手法を採らざるを得なかった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−90033号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、動作の正常、異常、特に異常を設置現場で確認し得る遮断機を提供することである。
【課題を解決するための手段】
【0007】
上述した課題を解決するため、本発明に係る遮断機は、サーボモータと、サーボモータ駆動部と、ケースと、腕金具とを含む。前記サーボモータは、前記サーボモータ駆動部によってその回転が制御される。前記ケースは、前記サーボモータ及び前記サーボモータ駆動部を収納している。前記腕金具は、前記ケースの外部に配置され、遮断かんを支持し、前記サーボモータによって回転駆動される。
【0008】
前記サーボモータ駆動部は、制御部と、設定部と、表示部とを含んでいる。前記制御部は、少なくとも、前記サーボモータに供給される電流、前記サーボモータの下降動作時間、及び、前記サーボモータの停止位置を制御する。前記設定部は、前記電流の制限値、前記下降動作時間及び前記停止位置を設定する。前記表示部は、前記電流、前記下降動作時間、前記停止位置及びその正常・異常を表示するものであって、表示内容が視認できるように、前記ケースに配置されている。
【0009】
上述したように、本発明に係る遮断機では、サーボモータ駆動部によってその回転が制御されるサーボモータによって、遮断かんを支持する腕金具が回転駆動される。サーボモータは、その本質的な機能として、その回転速度、回転位置等を任意に制御することができる。したがって、サーボモータによって回転駆動される遮断かんの下降速度、下降動作時間及び停止位置も、任意に制御することができる。
【0010】
サーボモータ駆動部は、制御部と、設定部とを含む。制御部は、少なくとも、サーボモータに供給される電流、サーボモータの下降動作時間、及び、サーボモータの停止位置を制御する。設定部は、電流の制限値、下降動作時間及び停止位置を設定する。サーボモータは、通常、位置検出器及び速度検出器を有していて、制御部は位置検出器及び速度検出器から得られた情報により、現在位置信号及び現在速度信号と、設定部によって設定された目標値とを比較する。差がある場合は、サーボモータを目標値との差分を減少させる方向に動かす。こうして、設定値と目的位置との差分は減少していく。この手順が、最終的に目的値に到達するか、許容範囲に入るまで続けられる。別の方法としてサーボモータの位置をデジタル的に記録しておき、目標値までの差分を与えて、目標値に一気に到達させる方法であってもよい。
【0011】
本発明においては、サーボモータ駆動部は、更に、表示部を備えている。表示部は、サーボモータに供給される電流、サーボモータの下降動作時間、及び、その正常・異常を表示する。これらの情報は、制御部から供給される。表示部は、表示内容が視認できるように、ケースに配置されている。したがって、サーボモータの動作状態の正常、異常、即ち、遮断かんの動作状態の正常、異常を、当該遮断機の設置現場で知ることができる。
【発明の効果】
【0012】
以上述べたように、本発明によれば、動作の正常、異常、特に異常を設置現場で確認し得る遮断機を提供することができる。
【図面の簡単な説明】
【0013】
【図1】図1〜図4に示した遮断機の電気的な構成を示すブロック図である。
【図2】本発明に係る遮断機の側面図である。
【図3】図2に示した遮断機の前蓋を取り除いた状態を示す正面図である。
【図4】図3に図示されたサーボモータ駆動部を示す図である。
【図5】図4に示したサーボモータ駆動部に含まれる制御部及び表示部の構成を示す図である。
【発明を実施するための形態】
【0014】
図1〜図5を参照すると、本実施の形態に係る遮断機は、サーボモータ1と、サーボモータ駆動部3と、ケース5と、腕金具7とを含む。サーボモータ1は、サーボモータ駆動部3によってその回転が制御される。サーボモータ1は、周知のように、位置、速度等を制御する用途に使用されるもので、ACサーボモータ、 DCサーボモータが知られている。何れのタイプを用いてもよいが、遮断機では、電源環境の観点から、多くの場合、DC電源用のサーボモータが用いられる。サーボモータ1の動作をフィードバックFbするために、サーボモータ1には、その回転位置、速度を検出する検出器11が付設される。位置の検出器11の代表例は、レゾルバであるが、その他、インクリメンタル・エンコーダ、アブソリュート・エンコーダ、ポテンショメータ等を用いてもよい。もっとも、インクリメンタル・エンコーダのように絶対位置情報を持たない検出器は、起動時に原点角度に復帰する必要がある。速度の検出器11としては、タコジェネレータが、一般に用いられる。
【0015】
ケース5は、サーボモータ1及びサーボモータ駆動部3を収納するものであって、図2に図示するように、本体部51と前蓋部53とを有しており、前蓋部53は、ヒンジ55等を用いて、本体部51の前面に開閉可能に取り付けられている。本体部51の裏側の外部には、腕金具7が取り付けられている。この腕金具7は、遮断かん9を支持するものであって、サーボモータ1に連結されている回転軸71の一端に固定されている。したがって、腕金具7は、回転軸71を介して、サーボモータ1によって回転駆動される。
【0016】
サーボモータ駆動部3は、図1に図示するように、制御部31と、設定部33と、表示部35、37とを含んでいる。これらは、シャーシ310,320,330に取り付けられている。シャーシ310とシャーシ330は板金一体構造になっている。制御部31は、少なくとも、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及び、サーボモータ1の停止位置を制御するもので、サーボアンプ、シーケンサなどを備える。制御部31は、検出器11から得られた情報により、現在位置信号と目的位置を比較する。そこで差がある場合、サーボモータ1を目的位置との差分を減少させる方向に動かす。こうして目的位置との差分は減少していく。
【0017】
設定部33は、電流の制限値、下降動作時間及び停止位置を設定する他、異常履歴を表示する。実施の形態において、トグル・スイッチ331の操作によって、「定位」及び「設定」の切替え操作ができるようになっている。トグル・スイッチ331は、通常動作時には、「定位」の位置にあり、各種の設定が必要になったときに、「設定」の位置に切り替えられる。
【0018】
表示部35、37は、表示内容が視認できるように、ケース5に配置されている。実施の形態では、前蓋部53を開いた時に、すぐに視認できる位置に配置されている。
【0019】
表示部35、37のうち、表示部35は、例えば、7セグメントLEDを用いた4ケタのデジタル表示方式であって、トグル・スイッチ331が「定位」の位置にあるとき、サーボモータ1の負荷率、トグル・スイッチ331の「設定」状態、停止位置、下降動作時間、制限電流値、異常履歴等が、この表示部35に表示される。
【0020】
表示部37は、トグル・スイッチ331が「設定」の位置にあるとき、制限電流、下降時間、位置調整、及び、異常履歴表示を実行していることを表示する。制限電流の設定表示に当たっては、シート・スイッチ333,335を操作して、制限電流表示部371を選択するとともに、サーボモータ1に通電する電流の制限値を、例えば、7A、11Aのように設定し、その設定値を、表示部35に表示して確認する。下降時間の設定も同様であって、シート・スイッチ333,335を操作して、下降時間表示部373を選択するとともに、遮断かん9下降動作の時間を、5.0秒、6.0秒、7.0秒、8.0秒等のように、段階的に設定し、これを表示部35に表示して確認する。
【0021】
位置調整に当たっては、シート・スイッチ333,335を操作して、位置調整表示部375を選択するとともに、サーボモータ1の停止位置(角度)を、表示部35に設定表示する。異常履歴の表示に当たっては、シート・スイッチ333,335を操作して、異常履歴表示部377を選択し、表示部35に異常履歴を表示する。
【0022】
更に、実施の形態には、電源スイッチ337、制御動作時にオンとする制御スイッチ339、外部との接続に用いられるコネクタCN1〜CN4、表示用LED39、測定端子TM1、TM2及びカウンタC等が図示されている。
【0023】
上述したように、本発明に係る遮断機では、サーボモータ駆動部3によってその回転が制御されるサーボモータ1によって、遮断かん9を支持する腕金具7が回転駆動される。サーボモータ1は、その本質的な機能として、上述したように、その回転速度、回転位置等を任意に制御することができる。したがって、サーボモータ1によって、下降DW又は上昇LFの方向に回転駆動される遮断かん9の下降速度、下降動作時間及び停止位置も、任意に制御することができる。
【0024】
サーボモータ駆動部3は、制御部31と、設定部33とを含む。制御部31は、少なくとも、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及び、サーボモータ1の停止位置を制御する。設定部33は、電流の制限値、下降動作時間及び停止位置を設定する。サーボモータ1は、通常、位置検出器11及び速度検出器11を有していて、制御部31は、位置検出器及び速度検出器11から得られた情報により、現在位置信号及び現在速度信号と、設定部33によって設定された目標値とを比較する。差がある場合は、フィードバックFbにより、サーボモータ1を目標値との差分を減少させる方向に動かす。
【0025】
本発明においては、表示部35、37を備えており、表示部35、37は、サーボモータ1に供給される電流、サーボモータ1の下降動作時間、及び、その正常・異常を表示する。表示部35、37は、表示内容が視認できるように、ケース5に配置されている。したがって、サーボモータ1の動作状態の正常、異常、即ち、遮断かん9の動作状態の正常、異常を、当該遮断機の設置現場で知ることができる。
【0026】
本発明は、主として、鉄道用電気踏切遮断機を提供するものであるが、これに限定されず、駐車場、有料道路の料金徴収所などのゲートに用いられる電気遮断機にも適用することができる。
【0027】
以上、好ましい実施例を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の変形態様を採り得ることは自明である。
【符号の説明】
【0028】
1 サーボモータ
3 サーボモータ駆動部
5 ケース
7 腕金具
【特許請求の範囲】
【請求項1】
サーボモータと、サーボモータ駆動部と、ケースと、腕金具とを含む遮断機であって、
前記サーボモータは、前記サーボモータ駆動部によってその回転が制御されるものであり、
前記ケースは、前記サーボモータ及び前記サーボモータ駆動部を収納しており、
前記腕金具は、前記ケースの外部に配置され、遮断かんを支持し、前記サーボモータによって回転駆動されるものであり、
前記サーボモータ駆動部は、制御部と、設定部と、表示部とを含み、
前記制御部は、少なくとも、前記サーボモータに供給される電流、前記サーボモータの下降動作時間、及び、前記サーボモータの停止位置を制御するものであり、
前記設定部は、前記電流の制限値、前記下降動作時間及び前記停止位置を設定するものであり、
前記表示部は、前記電流、前記下降動作時間、前記停止位置及びその正常・異常を表示するものであって、表示内容が視認できるように、前記ケースに配置されている、
遮断機。
【請求項1】
サーボモータと、サーボモータ駆動部と、ケースと、腕金具とを含む遮断機であって、
前記サーボモータは、前記サーボモータ駆動部によってその回転が制御されるものであり、
前記ケースは、前記サーボモータ及び前記サーボモータ駆動部を収納しており、
前記腕金具は、前記ケースの外部に配置され、遮断かんを支持し、前記サーボモータによって回転駆動されるものであり、
前記サーボモータ駆動部は、制御部と、設定部と、表示部とを含み、
前記制御部は、少なくとも、前記サーボモータに供給される電流、前記サーボモータの下降動作時間、及び、前記サーボモータの停止位置を制御するものであり、
前記設定部は、前記電流の制限値、前記下降動作時間及び前記停止位置を設定するものであり、
前記表示部は、前記電流、前記下降動作時間、前記停止位置及びその正常・異常を表示するものであって、表示内容が視認できるように、前記ケースに配置されている、
遮断機。
【図1】


【図2】

【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−1250(P2013−1250A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−134459(P2011−134459)
【出願日】平成23年6月16日(2011.6.16)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月16日(2011.6.16)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]