
川崎重工業株式会社により出願された特許
111 - 120 / 1,710
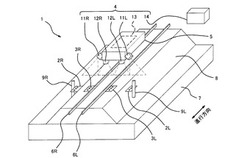
ふく進測定装置、ふく進測定システム及びふく進測定方法
【課題】簡素な構成でふく進量測定の作業効率や測定精度等を向上させる。
【解決手段】ふく進測定装置4は、鉄道のレール6R,6L上を走行する車両5に搭載され、車両走行中に、レール6R,6Lから側方に離れた位置で地面と一体的に設けられた基準マーカ2R,2Lと、レール6R,6Lと一体的に設けられたレールマーカ3R,3Lとを撮影するラインセンサ11R,11L,12R,12Lと、ラインセンサ11R,11L,12R,12Lで撮影された画像上において基準マーカ2R,2L及びレールマーカ3R,3Lを検出する画像処理部と、画像処理部で検出された情報から基準マーカ及びレールマーカのレール長手方向の位置を算出する位置算出部と、位置算出部で算出された各位置からレール6R,6Lのふく進量を算出するふく進量算出部と、を備えている。
(もっと読む)
燃料噴射装置

【課題】パイロット燃焼領域とメイン燃焼領域とが大きく離れることなく、低出力時におけるパイロット噴射弁の燃焼効率や着火性・保炎性を向上させることのできる燃料噴射装置を提供する。
【解決手段】燃焼室4内に拡散燃焼領域A1を形成するように燃料を噴霧するパイロット噴射弁6と、パイロット噴射弁6を囲むようにこのパイロット噴射弁6と同軸状に設けられ、燃焼室4内に予混合燃焼領域A2を形成するように燃料と空気の予混合気を供給するメイン噴射弁8とを備え、パイロット噴射弁6は、中心軸上で軸方向に直進する空気ジェットを噴出させる中心ノズル20と、その径方向外側に位置して流入する空気にパイロット噴射弁6の軸心回りの旋回を与える内側スワーラ30と、中心ノズル20と内側スワーラ30の間から中心ノズル20内の空気流に燃料を噴射するパイロット燃料噴射部22aとを有する。
(もっと読む)
摩擦撹拌接合用の回転工具、摩擦撹拌接合装置、及び摩擦撹拌接合方法
【課題】回転軸がぶれるのを抑え、かつ、ダブルスキン材の接合を効率よく行うことが可能な摩擦撹拌接合用の回転工具を提供する。
【解決手段】基端回転部材11と、基端回転部材11の下方に位置する中間回転部材12と、中間回転部材12の下方に位置する先端回転部材13と、基端回転部材11と中間回転部材12の間に位置する上プローブ14と、中間回転部材12と先端回転部材13の間に位置する下プローブ15と、を有している。
(もっと読む)
二酸化炭素回収方法および装置
【課題】 ボイラおよび蒸気タービンを備えた発電プラントから排出される被処理気体から、低エネルギーで二酸化炭素の脱離回収を行う二酸化炭素回収方法および装置を提供する。
【解決手段】
二酸化炭素回収装置20に設けた二酸化炭素吸着材をそれぞれ収納した2つの吸着材充填槽21および31において交互に、ボイラ3から排出された燃焼排ガスに含まれる二酸化炭素の吸着および脱離を行う。二酸化炭素の脱離に際しては、発電プラント1の蒸気タービン4の出口から排出されて凝縮器6に入る前の水蒸気の一部を分岐させて蒸気圧縮機37に送り、ここで圧縮・昇温した後、冷却器29に送る。冷却器29では圧縮・昇温後の水蒸気を冷却することにより、脱離用水蒸気を調製する。冷却器29で調製した水蒸気は、二酸化炭素の脱離のために吸着材充填槽21又は31に供給する。これにより、凝縮器6に入る前の廃蒸気を脱離用水蒸気の調製に使用することができる。
(もっと読む)
電波透過体の電力透過率測定方法
【課題】 簡単な構成で安価に電波透過体の電力透過率を求める方法を提供する。
【解決手段】 電波暗室4内で、治具6に代替アンテナ素子3とこの代替アンテナ素子3を覆うように電波透過体2とを搭載し、電波発生源7および反射板8によって放射した電波を前記代替アンテナ素子3によって電波透過体2有りの状態と電波透過体2無しの状態とで受信し、これらの受信信号に基づいて電力透過率を求める。
(もっと読む)
車両のブレーキ制御装置
【課題】一例として自動二輪車1のような車両の制動時に車輪2,3のロックを防止するように、当該車輪2,3に付与するブレーキ力を調整するABS制御において、それらの車輪2,3のロック傾向を直接的に検出し、より適切なABS制御の介入判定を行えるようにする。
【解決手段】車輪2,3の回転速度である車輪速度Vf,Vrの低下率ΔVf,ΔVrが所定の閾値以上であることを含む、ABS制御の介入条件が成立したか否かを判定する(第1および第2の判定部54,55)。介入条件が成立したと判定すればABS制御を開始する(ABS制御部56)。
(もっと読む)
マイクログリッドとその制御装置及びその制御方法
【課題】マイクログリッドと電力系統との連系点での電力平滑化を適切に実現する。
【解決手段】本発明のマイクログリッドの制御装置は、各発電設備(GEN#1〜#N)の発電電力を取得する手段と、取得した各発電設備の発電電力を合算した総発電電力(T_org)を算出する手段と、算出した総発電電力を平滑化してグリッド連系点での平滑化目標電力(T)を算出する手段と、算出した平滑化目標電力と算出した総発電電力との差分である総充放電電力指令値(ΔT)を算出する手段と、算出した総充放電電力指令値を複数の分散型電源設備それぞれの蓄電設備(BAT#1〜#N)に分担させるように蓄電設備それぞれに対する分担電力指令値(x_1〜x_n)を算出する手段と、算出した分担電力指令値を各蓄電設備に送信する手段と、を備える。
(もっと読む)
1軸1舵船の定点位置保持方法とその装置
【課題】 1軸1舵船において、船舶を安定して定点保持できる定点位置保持方法を提供すること。
【解決手段】 船体6の目標位置側を目標位置TPに向けるように船首5の方位を制御するとともに、この目標位置TPに対する現船位SPの相対位置が前後方向にずれている場合は前後進制御によって船位SPを目標位置TPに留めるように制御し、この目標位置TPに対する現船位SPの相対位置が左右方向にずれている場合は左右進制御によって船位SPを目標位置TPに留めるように制御して、前後左右の制御の切り換えにより船位SPを目標位置TPに留める。
(もっと読む)
疲労低減型溶接継手構造
【課題】 隅肉溶接により主板とリブ板を接合した溶接継手構造において、溶接止端部にかかる応力集中を緩和し、溶接継手の疲労強度を向上する。
【解決手段】 隅肉溶接の溶接金属3の全面に被覆すると共に主板1およびリブ板2に固着するパテ層4を積層し、パテ層の内部に剛性が高い補強部材32を埋設することにより、パテ層が隅肉溶接部にかかる応力を分担して負担すると共に溶接止端部への応力集中を緩和し、継手構造の疲労強度を向上する。
(もっと読む)
合紙付き板状部材移載システム及びその移載方法
【課題】 下にある合紙及び他の板状部材が連れられることなく最も上に位置する板状部材を搬送できる合紙付き板状部材移載システムを提供する。
【解決手段】 合紙付き板状部材移載システム1では、吸着装置12がガラス板2の表面を合紙3越しに吸着する複数の吸着パッド33,34を有している。エア吹付け装置14は、吸着されたガラス板2とその下に位置するガラス板2との間にエアを吹き付け、ロボット11は、吸着ユニット12を移動させるようになっている。クランプ装置15は、一対の押え部材66を有し、この一対の押え部材66は、ガラス板2の両側に配置され、互いが近づくように2板状部材に向かって夫々動くようになっている。制御装置17は、少なくとも吸着装置ユニット12によりガラス板2を持ち上げる前に一対の押え部材66を動かして各合紙2のガラス板2の側方からはみ出ている部分を押えるように構成されている。
(もっと読む)
111 - 120 / 1,710
[ Back to top ]