
レオン自動機株式会社により出願された特許
11 - 20 / 98
クロワッサン生地及びその成形方法並びに装置
【課題】両端を結着したクロワッサン生地及びクロワッサン生地の両端側を、搬送コンベアの上面に接触させつつ折曲げて両端部の成形/又は結着を行うことのできるクロワッサン生地の成形方法及び装置を提供する。
【解決手段】搬送コンベア5の上方位置に上下動自在かつ搬送コンベア5の搬送方向へ移動自在に備えた押えピン75によって前記クロワッサン生地3の長手方向の中央部であって搬送方向の前側を押えた状態にあるときに、前記搬送コンベア5の上方位置に上下動自在かつ前記押えピン75よりも搬送方向へ速く移動可能で互に接近離反自在な押圧部材99によって前記クロワッサン生地3の長手方向の両側を前記押えピン75を中心として折曲げ、前記クロワッサン生地3の両端部側を押圧して成形/又は結着するとき下方向への分力を作用させつつ両端部側の成形/又は結着を行い、その後に前記押圧部材99を上昇すると共に前記押えピン75を前記クロワッサン生地から上方向へ抜き取るときに、前記押えピン75の周面からエアーを噴出する。
(もっと読む)
包被食品の製造方法及び装置

【課題】外皮材でもって内材を包被した構成の包被食品の製造方法及び装置を提供する。
【解決手段】開口部33を備えた載置部材34上に、外皮材3を位置決めする工程と、複数のシャッタ片37によって形成されたシャッタ開口部39を閉動作して前記外皮材3を前記開口部33内に自重によって下方に窪ませる工程と、前記シャッタ開口部39の開口径を調整して、前記開口部33の周りに配置された外皮材3の周縁部3Aの生地量を調整する工程と、ノズル部材43を相対的に降下して、封止部材47によって前記外皮材3の前記周縁部3Aを前記載置部材34との間に挟持する工程と、前記ノズル部材43から内材11を供給して外皮材3を下方向に次第に膨張する工程と、ノズル部材43が相対的に上昇した後、前記各シャッタ片37によって前記外皮材3の周縁部を中央部に寄せ集めて封着する工程、の各工程を備えている。
(もっと読む)
食品製造装置及び食品製造方法
【課題】本発明は、従来に比べ装置全体がコンパクトで、構成が簡略化できる食品製造装置を提供し、また、生産効率が向上できる食品製造方法を提供することを目的とする。
【解決手段】食品素材を複数の棒状食品にして押出す押出装置と、前記棒状食品から食品を切断するシャッタを備えた切断装置と、前記食品を載置して搬送する搬送装置、前記各装置の駆動を制御する制御装置を備えた食品製造装置において、前記押出装置は前記棒状食品を押出す複数の押出ノズルを前記搬送装置の搬送方向に直交する前記搬送装置の幅方向に沿って千鳥状に配列すると共に、前記切断装置は、前記押出ノズルの下方位置にて前記押出ノズルのそれぞれに対応するシャッタを千鳥状に配列し、前記制御装置は、前記切断装置の1回当たりの切断動作に対する前記搬送装置の搬送距離を制御可能に備えている。
(もっと読む)
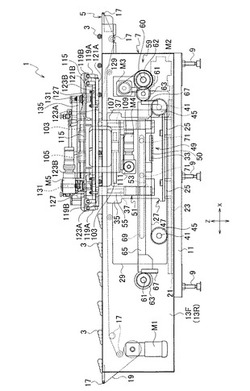
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
ロボットハンド
【課題】食製品の外周面を面接触によって均等に保持することのできるロボットハンドを提供する。
【解決手段】食製品5を保持自在なロボットハンドであって、ロボットハンド19におけるハンド支持部材29に互いに開閉自在に備えられた複数の開閉作動部材71を設け、各開閉作動部材71の開閉動作によって互いに中央部に集合する各開閉作動部材の集合端側に、食製品5を保持するためのフィンガ部材79を、前記ハンド支持部材29から下方向へ突出して備え、前記各フィンガ部材79が前記食製品5を保持する保持面77に、隣接したフィンガ部材79を摺動自在に接触して、前記各フィンガ部材79における前記保持面77によって囲繞して食製品5の周囲を面接触によって保持するための保持空間83を備えている。前記各開閉作動部材71が開閉動作する中央部に対応して、前記各フィンガ部材79の前記保持面77を清掃するための清掃手段を前記ハンド支持部材29に備えている。
(もっと読む)
保持部材
【課題】ロボットハンドにおいて食製品を保持する保持部材を提供する。
【解決手段】食製品を保持するためにロボットハンドに開閉自在に備えられる保持部材であって、ロボットハンド19におけるハンド支持部材29に開閉自在に支持される開閉作動部71と、この開閉作動部71の先端側において当該開閉作動部71の開閉作動方向に対して交差する方向へ突出して備えられたフィンガ部79と、前記食製品5を保持するために前記フィンガ部79に形成され、かつ隣接して備えられる別個のフィンガ部79と摺接すると共に食製品を囲繞する保持空間を形成するための保持面77とを備えている。
(もっと読む)
補助作業具
【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
食品生地の整列方法及び装置
【課題】搬送コンベアによって搬送される食品生地を、整列部材に当接して整列する際の、食品生地の変形、粘着を抑制することのできる食品生地の整列方法及び装置を提供する。
【解決手段】搬送コンベア3Bによって下流方向へ搬送される複数列の食品生地1における先頭部分を、搬送方向に対して直交する直線L1,L2上に整列する食品生地の整列方法であって、前記各列に対応して食品生地1の当接整列を行う複数の整列部材27を、前記搬送コンベア3Bの搬送方向へ往復動自在かつ搬送コンベア3Bに対して上下動自在に備え、前記整列部材27が前記搬送コンベア3Bの搬送速度よりも小さな速度で下流方向へ移動しているときに、前記搬送コンベア3Bによって下流方向へ搬送される各列における食品生地1の先頭部を、各列に対応した前記各整列部材27に当接した後に前記整列部材27を上昇する。
(もっと読む)
食品載置方法及び装置
【課題】例えばトレイの周縁部に立上り部を備えている場合であっても、上記立上り部の内側に近接した位置へ食品を載置してデッドゾーンを少なくすることのできる食品載置方法及び装置を提供する。
【解決手段】一方向へ間欠的に又は連続的に移送される食品載置部材5に対して、当該食品載置部材5に対して水平方向へ進退自在かつ搬送端側に下方向へ傾斜した傾斜部を備えた搬送コンベア13によって食品7を整列載置する食品載置方法であって、前記搬送コンベア13の後退方向であって前記食品載置部材5の一端縁に近接した位置へ食品を載置するとき、前記搬送コンベア13の前記傾斜部11を斜め上方向へ縮小後退し、前記搬送コンベア13の前記傾斜部11を斜め上方向へ縮小後退するとき、前記傾斜部11の先端側に上下に揺動可能に備えた揺動端部を、前記傾斜部11に対して下方向へ揺動する食品載置方法である。
(もっと読む)
包被食品の製造方法及び装置
【課題】外皮材でもって内材を包皮した構成の包被食品の製造方法及び装置を提供する。
【解決手段】外皮材でもって内材を包み込んだ包被食品の製造方法であって、
開口部33を備えた載置部材34上に、前記開口部33を覆うように偏平状の外皮材3を位置決めし、開閉可能な複数のシャッタ片37からなる開口部を閉動作して前記外皮材3の中心位置を前記開口部33の中心位置に一致すべく前記外皮材3を移動し、内材11を供給するためのノズル部材43を相対的に降下して、当該ノズル部材43に備えた封止部材47によって前記外皮材3の周縁部を前記載置部材34との間に挟持する。前記ノズル部材43から前記外皮材3の内部に内材11を供給して外皮材3を下方向に次第に膨張し、内材11を供給した後に前記ノズル部材43を相対的に上昇する。ノズル部材43が相対的に上昇した後、前記各シャッタ片37によって前記外皮材3の周縁部を中央部に寄せ集めて封着する。
(もっと読む)
11 - 20 / 98
[ Back to top ]