
株式会社モリタ製作所により出願された特許
41 - 50 / 173
スキン部材
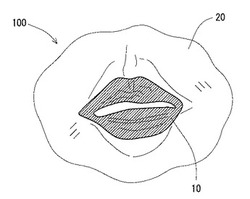
【課題】医療用実習シミュレーターロボットに適用されるスキン部材にかかるコストを抑制しつつ、実習効果を向上し得る技術を提供する。
【解決手段】スキン部材100は、歯科分野の実習で使用される医療用実習シミュレーターロボットに適用される人工皮膚である。スキン部材100は、処置部位である唇を構成する第1の部材10と、第1の部材10と一体化されることによって処置部位の周辺部を構成する第2の部材20とを備えている。第1の部材10及び第2の部材20は、ともに熱可塑性エラストマーを主成分としている。また第1の部材10は、第2の部材20とは相異する色調を呈している。さらに第1の部材10は、第2の部材20よりも引張特性が優れており、引張力に対して伸びやすい構造を有している。
(もっと読む)
医療用実習装置、医療実習方法およびプログラム

【課題】医療用実習をより効果的なものとし得る技術を提供する。
【解決手段】医療用実習装置Mは、医療面接シナリオ91Aを実行する。このシナリオでは実習者と疑似患者体2との間で会話に基づいた医療面接が実施される(ステップS104)。また医療用実習装置Mは次に検診シナリオ91Bを実行する。このシナリオでは、医療用実習装置Mは、実習者が疑似患者体2に対して行う検診処置を検知する(ステップS106)。そして医療用実習装置Mは、治療シナリオ91Cを実行する。このシナリオでは、実習者が行う治療処置を医療用実習装置Mは疑似患者体2により受け付ける(ステップS111)そして医療用実習装置Mは、医療面接、検診、治療の各実習項目のそれぞれについて、所定器順位基づいて評価演算した評価結果を実習者に対して通知する。
(もっと読む)
画像処理装置、X線撮影装置、画像表示方法、画像比較方法、および画像表示プログラム
【課題】複数の撮影画像45を表示して観察する際に、観察者が一部の撮影画像45や全部の撮影画像54に対して高い操作性で操作できるようにする。
【解決手段】記憶手段23から読み出して表示手段5に表示している撮影画像45に対して操作手段6により画像操作を許容し、リンクボタン59によりリンクが設定されていれば1つの撮影画像45に対して操作手段6によって画像操作された内容をリンク設定された他の撮影画像45にも同時に適用するステップS14を実行し、リンクボタン59によりリンクが設定されていなければ1つの撮影画像45に対して操作手段6によって画像操作された内容をその撮影画像45に対して適用して他の撮影画像45に適用しないステップS15を実行する。
(もっと読む)
医科歯科用ハンドピース
【課題】歯厚を十分に確保した状態で歯車間の噛み合い率の値を大きくでき、歯車間に安定した噛み合わせが得られ、歯車の耐久性を向上し、且つ治療工具を高速で回転駆動できる医科歯科用ハンドピースを提供する。また、歯牙切削時に術者が使用しやすい医科歯科用ハンドピースを提供する。
【解決手段】
グリップ3の内部に第1、第2の回転軸101,201を連結した第1の歯車機構1000と第2、第3の回転軸201,301を連結した第2の歯車機構2000を収容し、回転軸101から歯車機構1000を介して回転軸201に回転を伝達し、回転軸201から歯車機構2000を介して回転軸301に回転を伝達し、歯車機構1000,2000は一方の回転軸に固定された大径の内歯車と他方の回転軸に固定された小径の内歯車を噛み合わせて構成され、内歯車の周縁に接する仮想円筒面1001,2001の内側に外歯車が実質的に内包されている。
(もっと読む)
医療用照明装置及び医療用診断装置
【課題】照明を制御するための多様な指示を受付けることができ、かつ、その多様な指示をなるべく短時間で行えるようにすることを目的とする。
【解決手段】筐体と前記筐体に組込まれた光源と前記光源からの光を反射する鏡体とを有する照明機構部と、物体の動きを検出するモーション検出部と、前記照明機構部の照明動作を制御する照明制御部とを備えている。照明制御部は、モーション検出部によって検出された物体の動きに基づいて照明動作を制御する。
(もっと読む)
医科歯科用画像表示装置、医科歯科用CT画像表示方法、医科歯科用治療シミュレーション方法、および医科歯科用プログラム。
【課題】X線CT撮影で得た3次元ボリュームデータ43を基にX断層面画像Gx、Y断層面画像Gy、およびZ断層面画像Gzを表示するに際して、指定した表示条件での表示を効率よく実行する。
【解決手段】表示部5は、拡大領域指定部33によって指定された領域の3次元ボリュームデータ43に基づく画像を指定領域CT画像表示画面50Aに表示する構成であり、断層位置制御部31は、指定領域CT画像を表示する際のスライス位置や回転角度等の指定操作も許容する構成であり、記憶部23は、前記指定領域CT画像におけるスライス位置や回転角度等を該指定領域CT画像と関連づけて記憶するX線画像表示装置2であることを特徴とする。
(もっと読む)
X線撮影装置
【課題】X線の照射範囲が異なる種々のX線撮影を実行可能するX線撮影装置において、X線画像の解像度を向上する技術を提供する。
【解決手段】X線撮影装置100は、陰極91と陽極92とを含むX線発生器13を有し、前記X線発生器13からX線ビームを出射するX線発生部10と、X線ビームを検出するX線検出部20と、前記X線発生部10と前記X線検出部20とを、前記被写体を挟んで互いに対向させつつ、前記被写体周りに旋回させてX線撮影を行う。X線撮影装置100は、規制部15を制御することにより、図12(b)に示す比較的狭い撮影対象領域R2のX線CT撮影時のX線ビームBX2の焦点サイズを、図12(a)に示す比較的広い撮影対象領域R1のX線CT撮影時のX線ビームBX1の焦点サイズよりも小さくなるようにX線の透過を規制する。
(もっと読む)
X線CT撮影装置
【課題】X線CT撮影における画像の解像度を向上する技術を提供すること。
【解決手段】X線コーンビームBX1を射出するX線発生器13とX線検出器21とを、互いに対向させた状態で、撮影対象領域CA(歯列弓の一部)の中心を回転中心として、180度にX線コーンビームBX1のファン角を加えた回転角分回転させて、投影データを収集する。この回転時において、X線発生器13と撮影対象領域CAとの間にX線の散乱度の高い高散乱領域HSRが介在するように、X線発生器13およびX線検出器21を回転させる。これにより、高散乱領域HSRにおけるX線の散乱によるX線画像の画質低下を抑制する。
(もっと読む)
治療器
【課題】非高周波治療から高周波治療へスムーズに移行することのできる技術を提供すること。
【解決手段】根管拡大用ハンドピース10は、モーター17によってファイル11を回転駆動するモーター駆動回路18と、ファイル11及び受動電極22に対して高周波信号を出力する高周波信号発生回路19と、根尖位置を検出する根管長測定回路20とを有する。オペレーターは、設定操作部15を操作することによって、ファイル11を回転駆動させるか、高周波信号を出力させるかどちらかを選択し、駆動操作部16を操作することによって各動作モードでの患部の治療を実施することができる。
(もっと読む)
治療器
【課題】治療器の構成を簡略化し小型化および軽量化を図り得る技術を提供する。
【解決手段】治療器10は、外部診断機器である根管長測定器91によって取得された根管長情報を、通信ケーブル20を介して受信する通信部19と、根管長情報を表示するための表示デバイス12と、根管拡大処置を行うためにファイルFが取り付けられた治療器本体部11を備えている。治療器本体部11は、使用者が把持するための把持部111を構成しており、把持部111の外周部分に表示デバイス12が設けられている。使用者は、治療器10を把持して根管拡大処理を行う際に、表示デバイス12において根管長を視認することができる。
(もっと読む)
41 - 50 / 173
[ Back to top ]