
古野電気株式会社により出願された特許
51 - 60 / 441
ETCを利用した工事用車両等の車両識別情報通知装置及び車両識別情報通知方法
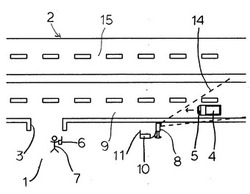
【課題】入場門の交通誘導員や守衛が、一般道路を走る車両の中から入場門から入る工事用車両だけを容易且つ安全に識別する。
【解決手段】車両が特定場所内へ進入するための進入口から所望の距離離れた道路を通行する車両に設けられたETC車載器の個体番号を取得する個体番号取得装置と、上記取得したETC車載器の個体番号から、上記車両の車両識別情報を判別する判別装置と、上記車両識別情報を通知する通知装置とよりなり、上記判別装置は、上記ETC車載器の個体番号とその車両の車両識別情報とを対にして記憶した記憶部と、上記個体番号取得装置により取得されたETC車載器の個体番号と上記記憶部に記憶されたETC車載器の個体番号とが一致するか否かを比較する判別部とよりなり、上記判別部により個体番号が一致すると判断された場合に、そのETC車載器の個体番号と対に記憶した車両識別情報を上記通知装置により通知する。
(もっと読む)
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置

【課題】クラッタを効果的に抑圧することができる物標探知方法を実現する。
【解決手段】まず、1スキャン分の探知データを極座標系で取得し、距離方向と方位方向とを二軸とする二次元座標系で記憶する(S101)。極座標系の二次元座標で記憶された探知データに対して、二次元ウェーブレット変換を複数の解像度で実行する。クラッタの特性に応じて設定された特定の解像度における展開係数分布に基づいて、極座標系からなるマスク画像データの各座標位置のレベルを設定する(S102)。座標位置毎に探知データのレベルからマスク画像データのレベルを減算して、表示画像データを生成する(S103)。
(もっと読む)
コード追尾方法、測位信号受信方法、コード追尾プログラム、測位信号受信プログラム、コード追尾装置、測位信号受信装置、および移動端末
【課題】マルチパスの影響を受けにくいコード追尾方法を実現する。
【解決手段】ゲート処理部56は、コード発生器502からのレプリカコード信号に対して、チップの開始タイミングを起点として、1.0chipよりも極短い所定時間長(例えば0.1chip)分だけ、レプリカコード信号を通過させる処理を行う。シフトレジスタ503は、ゲート処理後レプリカコード信号に基づいて、ゲート処理後Eレプリカコード信号SRδEおよびゲート処理後Lレプリカコード信号SRδLを生成する。ゲート処理部57Pは、ベースバンド信号SBをゲート処理し、ゲート処理後ベースバンド信号SδBを生成する。E相関部52は、ゲート処理後Eレプリカコード信号SRδEとゲート処理後ベースバンド信号SδBとを相関処理し、L相関部53は、ゲート処理後Lレプリカコード信号SRδLとゲート処理後ベースバンド信号SδBとを相関処理する。
(もっと読む)
物標探知装置及び物標探知方法
【課題】単体魚等の物標を高精度で検出する。
【解決手段】単体魚の検出を行う水中探知装置10は、受信信号に対し、所定期間毎にその期間内の最大値を抽出するマックスピークホールド部1611と、受信信号に対し、所定期間毎にその期間内の最小値を抽出するミニピークホールド部1612と、互いに異なるピークホールド位置で抽出された最小値と最大値との間の勾配を用いて単体魚を示す信号の立ち上がり及びその立ち下がりを判定する単体魚一次検出処理部162とを備えている。
(もっと読む)
水中探知装置及び水中探知システム
【課題】他船の航跡からの反射信号に関わらず、魚群信号を識別容易に表示する。
【解決手段】スキャニングソナー10は、レーダ装置10から他船の位置の情報を継続して取得する。表示画像処理部134は、この他船の位置情報に所定の加工、すなわち輝点を表す画像信号に変換する処理を施す。変換された輝点画像は、航跡情報に沿って線状となり、探知画像に重畳されて表示部に導かれる。
(もっと読む)
底質判別装置、超音波探知機、パラメータ設定方法及びパラメータ設定プログラム
【課題】ニューラルネットワークを用いて、正解率の高い底質判別結果を得ることができる底質判別装置、超音波探知機、パラメータ設定方法及びパラメータ設定プログラムを提供する。
【解決手段】水中に出力された超音波に係るエコー信号を入力し、ニューラルネットワークを用いて底質判別処理部172で海底の底質判別を行う超音波探知機において、結合荷重記憶部174に、ニューラルネットワークで用いる結合荷重を、位置情報に対応付けて複数記憶する。結合荷重設定部173は、位置情報を受け付け、受け付けた位置情報に対応する結合荷重を、結合荷重記憶部174から取得し、取得した結合荷重を、底質判別処理部172のニューラルネットワークに設定する。
(もっと読む)
探知装置、探知方法、および探知プログラム
【課題】コストや回路規模の増大を抑えながら受信信号を飽和させない探知装置を提供する。
【解決手段】受信信号監視部142は、メモリ17から海底深度に応じた受信信号を読み出し、飽和状態を監視する。例えば、海底深度よりも数サンプル程度浅い深度に対応する受信信号から順に所定サンプル数の受信信号を読み出し、これらのサンプルの最大値が飽和レベルに達したか、あるいは飽和レベルに近づく場合飽和状態であると判定する。送信条件設定部145は、受信信号監視部142で受信信号が飽和状態であると判定された場合、送信信号の条件を変更する。すなわち、送信回路13に対し、次のpingから送信信号の出力を低減する設定を行い、受信信号の飽和を防止する。
(もっと読む)
探知装置、水中探知装置、探知方法及びプログラム
【課題】余分な機器を設けることなく、反射波に含まれる雑音を低減させて、精度のよい探知結果を得る。
【解決手段】水中探知装置1において、受信信号Rf(t)から、エコー及びノイズに係る受信信号Rf(t1)と、ノイズのみに係る受信信号Rf(t2)とに分離し、それぞれの受信信号Rf(t1)及びRf(t2)をフーリエ変換する。受信信号Rf(t1)及びRf(t2)のパワースペクトルを算出した後、受信信号Rf(t1)からRf(t2)のパワースペクトルを減算し、減算結果に対してフーリエ逆変換を行う。水中探知装置1は、その結果に基づいて、水中の探知を行う。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】スキャン相関によって物標のエコーが弱まることを防止する信号処理装置を提供する。
【解決手段】信号処理部17は、物標検出部16が物標を検知した地点に対応するスキャン相関後のエコー信号のレベルを調整する。具体的には、物標検出部16が物標を検知した各地点を中心としてガウス関数に基づく特性でレベル調整を行う。物標が検出された地点では、強いエコー信号が検出されていることになるため、その地点のエコー信号をレベル調整(強調)することで、高速で移動する物標のエコー信号がスキャン相関によって弱まったとしても、高いレベルで出力することができる。また、ガウス関数に基づく特性でレベル調整を行うため、ある地点だけ極端にエコー信号が強調されてしまうことを防止することができる。
(もっと読む)
探知装置、レーダ装置、探知方法、および探知プログラム
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
(もっと読む)
51 - 60 / 441
[ Back to top ]