
株式会社デンソーウェーブにより出願された特許
221 - 230 / 1,155
携帯端末装置
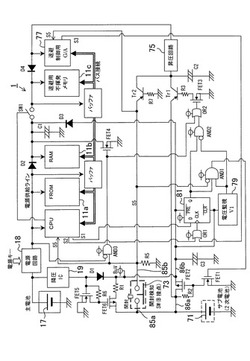
【課題】ケースが不正に開封される場合に、揮発性メモリ及び不揮発性メモリのデータを消去することができ、更に、補助電池の監視に必要な電力を極めて低く抑えることができる携帯端末装置を提供する。
【解決手段】携帯端末装置1では、補助電池71からの電力供給が低レベル状態となったか監視し、その低レベル状態が検出された場合には、RAM11bに記憶されるデータを不揮発性メモリ11cに退避し、補助電池71からRAM11bへの供給電力を遮断する。そして、不揮発性メモリ11cへの退避後には、補助電池71から退避手段へ供給される電力を遮断している。更に、開封検知スイッチが通電状態(開封状態)に切り替えられたときには、RAM11bへの通電を遮断し、RAM11bへの供給電力を無力化させ、更に、不揮発性メモリ11cに開封形跡を残すか、もしくは不揮発性メモリ11cの記憶データを消去している。
(もっと読む)
携帯型RFIDリーダ

【課題】円偏波の電波を送信可能な携帯型RFIDリーダにおいて、軸比をより適切に調整することができ、読み取りをより良好に行い得る構成を提供する。
【解決手段】携帯型RFIDリーダ1は、円偏波の電波を放射可能に構成され、円偏波の軸比を変更可能な軸比可変アンテナ40が用いられている。更に、鉛直方向に対するケース2の傾きに応じた計測値を取得する端末傾斜計測手段と、鉛直方向に対するRFIDタグ50の傾きに応じた計測値を取得する媒体傾斜計測手段と、端末傾斜計測手段によって取得された計測値と、媒体傾斜計測手段によって取得された計測値とに基づき、軸比可変アンテナ40から放射される円偏波の軸比を、RFIDタグ50に対するケースの傾斜状態に応じた値に変更する軸比調整手段とが設けられている。
(もっと読む)
携帯型RFIDリーダ
【課題】直線偏波の電波を放射するアンテナを用いて無線通信を行う携帯型RFIDリーダにおいて、無線通信媒体の読み取りを良好に行うことができ、且つ電力消費を効果的に低減し得る構成を提供する。
【解決手段】携帯型RFIDリーダ1は、直線偏波の電波を放射するアンテナ40を備えており、更に、アンテナ40から放射される電波の偏波面と水平方向とのなす角度に応じた値を検出する傾斜センサ17と、傾斜センサ17によって検出された値に基づいて、アンテナ40を介して送信される電波の送信出力及びアンテナ40を介して受信される電波の受信感度の少なくともいずれかを調整する調整手段とを備えている。
(もっと読む)
レーザレーダ装置
【課題】回動可能な偏向部をレーザ光投射時及び反射光検出時に兼用するレーザレーダ装置において、投光時のレーザ光の経路と受光時の反射光の経路を適切に確保することができ、且つ投光時のノイズ光の発生を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1は、レーザ光L1の投光経路上且つ反射光L2の受光経路上においてミラー30が設けられている。このミラー30には、凹面鏡41にて偏向された反射光L2をフォトダイオード20に向けて反射する第1反射部31と、レーザダイオード10からのレーザ光L1を凹面鏡41に向けて反射する第2反射部32とが形成され、第1反射部31の第1反射面31aと第2反射部32の第2反射面32aは、傾斜状態又は湾曲状態が異なるように構成されている。
(もっと読む)
携帯端末
【課題】内蔵電池の容量劣化状態を適切に把握し得る構成を部品点数の増加や装置構成の大型化を抑えつつ実現する。
【解決手段】携帯端末1では、予め分類された複数の動作状態の各消費電流量が記憶されている。そして、携帯端末1で行われる動作がいずれの動作状態に該当するかを判断し、その判断される各動作状態での動作実行時間を測定している。更に、その記憶された各動作状態の消費電流量と、測定された各動作状態での動作実行時間とに基づいて、携帯端末1の累積電力量を算出している。そして、測定される電池17の電圧が閾値に達する電圧低下状態を検出し、所定の算出開始時期から、電圧低下状態が検出されるまでに累積電力量算出手段によって算出された累積電力量に基づいて電池17が容量劣化状態であるか否かを判断している。
(もっと読む)
無線端末方向探知装置
【課題】同周波数帯に干渉電力が存在する場合にも、精度の良い方向探知が可能な無線端末方向探知装置を提供する。
【解決手段】方位角θを変化させつつ(ステップS2、S9)、電力値を検出し(ステップS3)、検出した電力値に基づいて電力値パターンを生成し(ステップS11)、生成した電力値パターンを用いてタグ方向を判定する(ステップS12)。ただし、変調情報が正常に復調できるか否かを判断し(ステップS5)、正常に復調できない場合にはその変調情報に対応する電力値は用いず、補間により電力値パターンを生成する(ステップS11)。これにより、受信電力が大きくても、異なったシステムの無線端末からの電波の干渉が大きい電波を除去して無線端末の方向を探知することができる。よって、誤った方向を探知してしまうことが抑制できる。
(もっと読む)
ロボットの動作制御装置及びその動作制御方法
【課題】ロボットのの動的精度を向上させ、ティーチングに要する時間を短縮する
【解決手段】ロボット2の動作を制御する制御装置3は、軸毎に指令値に対する目標軌跡と実際の動作軌跡との差をサーボ遅れ時間として計算し、その計算した軸毎のサーボ遅れ時間を比較して軸毎のサーボ遅れ時間が複数の軸の全てで一致するように基準時間を決定し、その計算した軸毎のサーボ遅れ時間と当該決定した基準時間とに基づいて軸毎の補償トルクを計算し、その計算した軸毎の補償トルクを反映した指令値を各サーボに出力してロボット2の動作を制御する。
(もっと読む)
プログラマブルコントローラ
【課題】通電状態を維持したまま端子台の取り付けおよび取り外しが行われる場合におけるスパークの発生を抑えるとともに、端子台の抜けを未然に検出する。
【解決手段】基板側電極部7の単位電極21、22は、抵抗値の大きい抵抗R1、抵抗値の小さい抵抗R2を介して回路基板6の内部回路に接続され、単位電極23は直接内部回路に接続される。接点部13は、挿し込み方向に延びるとともに並んで配置された長さの異なる第1、第2の接続ピン26、27を備えている。第1、第2の接続ピン26、27の各先端部には、第1、第2の電気接点28、29が設けられる。第1、第2の電気接点28、29は、回路基板6側が丸みを帯びた円弧状の断面となっている。制御部は、挿し込み動作完了後、検出回路により接点部13が単位電極22、23の両方に接触する状態が検出されると、端子台が抜けかかった状態であると判断する。
(もっと読む)
ロボットの回転規制装置
【課題】狭いスペースに配設することができ、しかも、回転リンクの回転動作範囲を360度を超える角度に規制することも可能なロボットの回転規制装置を提供する。
【解決手段】手首アームのフレームの先端開口部を塞ぐ蓋部材に環状の収納空間30を形成し、この収納空間30内に両端を径小側内面壁30aと径大側内面壁30bに連結した線状のフレキシブルワイヤー29を収容すると共に、フランジ(回転リンク)と一体に回転する掛合ピン41を挿入する。フランジが許容角度範囲を超えて回転しようとすると、掛合ピン41に引っ掛けられて径小側内面壁30aに巻き付けられるフレキシブルワイヤー29が伸び切ってフランジの回転を強制的に停止させる。
(もっと読む)
侵入検出装置
【課題】レーザー光を出力し、その反射光を検出することによって侵入物体の有無を検出する侵入検出装置において、侵入物体が犬や猫などの動物なのか、人なのかを判別する。
【解決手段】半導体レーザー14から出力されたレーザー光Bをビームスプリッター6によって第1のレーザービームB1と第2のレーザー光B2に分離する。第1のレーザー光B1は水平に出射され、第2のレーザー光B1は更にミラー7により反射されて斜め上向きに出射される。侵入検出エリアE内に物体が侵入した場合、その侵入物体が動物のときには第1のレーザー光B1だけが侵入物体に当たって反射し、人の時には第1のレーザー光B1と第2のレーザー光B2が侵入物体に当たって反射する。フォトダイオード10が1回反射光を受光すれば、侵入物体は犬や猫などの動物と判定し、2回反射光を受光すれば、侵入物体は人であると判定する。
(もっと読む)
221 - 230 / 1,155
[ Back to top ]