
株式会社デンソーウェーブにより出願された特許
241 - 250 / 1,155
携帯端末
【課題】外部装置とUSB通信が可能な携帯端末において、ノイズ等に起因する異常信号に対処しやすい構成を提供する。
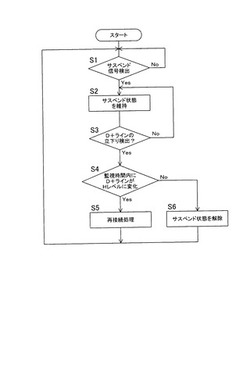
【解決手段】携帯端末1は、USB通信端子41を介して外部装置とUSB通信を行う通信手段を備え、この通信手段は、USB通信端子41に接続されたUSB通信ライン42の状態がサスペンド指示状態となったか否かを判断するサスペンド指示状態判断手段と、サスペンド指示状態が検出された後にUSB通信ライン42がレジューム指示状態に変化したことを検出するレジューム指示状態検出手段と、レジューム指示状態への変化が検出されてからの経過時間を測定するタイマ50と、その経過時間が閾値に達するまでの間、レジューム指示状態の解除を監視する解除監視手段と、経過時間が閾値に達する前にレジューム指示状態の解除が検出された場合に再接続処理を行う再接続手段とを備えている。
(もっと読む)
ロボットの回転規制装置

【課題】狭いスペースに配設することができ、しかも、回転リンクの回転動作範囲を360度を超える角度に規制することも可能なロボットの回転規制装置を提供する。
【解決手段】手首アームのフレームの先端開口部を塞ぐ蓋部材に環状の収納空間30を形成し、この収納空間30内に両端を径小側内面壁30aと径大側内面壁30bに連結したフレキシブルバンド29を収容すると共に、フランジ(回転リンク)と一体に回転する掛合ピン41を挿入する。フランジが許容角度範囲を超えて回転しようとすると、掛合ピン41に引っ掛けられて径小側内面壁30aに巻き付けられるフレキシブルバンド29が伸び切ってフランジの回転を強制的に停止させる。
(もっと読む)
監視システム及び無線タグ
【課題】監視対象者が所定の静止状態となったことをより早く且つより正確に検出し得る構成を提供する。
【解決手段】監視システム1は、無線タグ50を無線タグリーダ10によって読み取ることで監視するものである。無線タグ50は、当該無線タグ50の静止状態を検出する静止状態検出手段と、静止状態検出手段によって検出される静止状態の継続時間を検出する静止継続時間検出手段と、静止継続時間検出手段によって検出された継続時間が所定時間を経過したか否かを判断する判断手段と、判断手段によって継続時間が所定時間を経過したと判断された場合に報知信号を出力する報知信号出力手段とを有している。
(もっと読む)
ロボットシステム
【課題】高トルク運転時にモータに対して十分な電力を供給可能にするとともに、減速動作時にモータから生じる回生エネルギーを有効利用可能にする。
【解決手段】昇降圧回路29は、入力電圧を昇圧して出力する昇圧動作、入力電圧を降圧して出力する降圧動作および入力電圧をそのまま出力する非昇降圧動作のいずれかの動作を実行する。制御部27は、自動モードに設定されるとモータMの動作状態に応じて昇降圧回路29の動作状態を自動的に切り替え、高トルクモードに設定されると昇圧動作を実行するように昇降圧回路29の動作を制御し、省エネモードに設定されると降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、回生エネルギーをインダクタL1に蓄積可能な状態となるように昇降圧回路29の動作を制御する機能と、モータMに対するダイナミックブレーキをかけるように昇降圧回路29の動作を制御する機能とを有する。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Aは、ワークWをシステム20Fから受け取るとともに、ワークWをシステム20Bへ引き渡す載置台22Aを備える。システム20Aは、システム20Aの載置台22Aからシステム20Bの載置台22BへワークWを受け渡すロボット30Aと、載置台22AにおいてワークWに対して作業を行う作業装置21Aとを備える。システム20Aは、ロボット30Aに設けられたRFIDタグ33Aと、ロボット30FがワークWを載置台22Aへ受け渡す際に、RFIDタグ33Fの情報を無線で読み込むリーダライタヘッド25Aと、ロボット30AがワークWを載置台22Aから引き渡す際に、RFIDタグ33Aに情報を無線で書き込むリーダライタヘッド25Aと、を備える。
(もっと読む)
位置検出システム
【課題】無線タグリーダによって無線タグの位置を追跡し得る位置検出システムにおいて、無線タグの電力消費を効果的に抑制する。
【解決手段】位置検出システム1において、無線タグリーダ10は、可変指向性アンテナ14を備えると共に、無線タグ50に対して電波の走査速度に関するデータを含む送信データを送信可能とされており、更に、無線タグからの電波を取得したときの可変指向性アンテナに対する電波の最大入射方向に基づいて無線タグ50の方位を追跡可能とされている。無線タグ50は、送信データに含まれる「走査速度に関するデータ」に基づいて、当該無線タグ50における周期的な電波送出時間帯を決定しており、その決定された電波送出時間帯に従い、アンテナ54を介して電波を周期的に送信している。
(もっと読む)
携帯型決済端末
【課題】非接触通信媒体を用いた決済が可能な携帯型決済端末において、暗証番号の漏洩を効果的に防止し得る構成を、装置構成の大型化を抑えて実現することを目的とする。
【解決手段】携帯型決済端末1は、情報を表示する表示部13側に翳されたICカードCと非接触通信可能な無線リーダ部20を備えている。また、所定の配列で配置された複数の入力キー11aの配列と対応する配列をなし、各入力キー11aに対応する位置にそれぞれ番号を割り当ててなる番号配列表Tを生成すると共に、生成された番号配列表Tの番号配列を変更可能に構成されている。そして、無線リーダ部20がICカードCと通信している間に入力キー11aにより入力された入力情報を、番号配列表Tにおける当該入力キー11aに対応する番号に変換することで変換入力情報を生成し、この変換入力情報の照合を行う。
(もっと読む)
ロボットの回転規制装置
【課題】ワイヤによってリンクの回転動作範囲を規制するロボットの回転規制装置において、ワイヤをロボットの内部に収納でき、また、リンクの回転動作範囲をリンク毎に所望の角度に設定することができるようにする。
【解決手段】ワイヤ27の両端部を、一のリンクのフレーム9と、当該フレーム9の内側に位置され他のリンクが連結される回転軸13とに連結し、他のリンクの回転に伴ってワイヤ27が回転軸13に巻き取られて伸び切ることにより他のリンクの回転動作範囲を規制する。
(もっと読む)
セキュリティ装置の読取ユニット保持装置
【課題】ケーシングの従来の構成を利用した簡単な設計の変更でケーシングと読取ユニットとの位置の決定、およびケーシングと読取ユニットとの組み付けが容易なセキュリティ装置の読取ユニット保持装置を提供する。
【解決手段】読取ユニット21をケーシング13に取り付けるとき、読取ユニット21の突出鍔部31を傾斜案内部35に沿わせることにより読取ユニット21の位置が概略的に決定される。これとともに、ピン部33が突出鍔部31の孔43に挿入されるので、さらに読取ユニット21をケーシング13側に押し込むとき、読取ユニット12はピン部33に案内される。そして、ケーシング13側へ押し込まれた読取ユニット21の突出鍔部31が移動規制部36を乗り越えると、突出鍔部31と移動規制部36を形成する爪部34とは噛み合った状態となり、読取ユニット21はケーシング13に保持される。
(もっと読む)
ロボットの評価制御方法及びロボットの制御装置
【課題】ロボットが設置された現場でティーチングを行う際に、ユーザがロボットと設備との衝突を回避できるよう支援する評価制御方法を提供する。
【解決手段】ロボット本体が動作する動作領域空間を、立方体状の単位空間であるキューブの集合として捉え、各キューブの外面を規定する3次元座標値を決定すると、キューブよりもサイズが大きな空間によって、ロボット本体の手先部分を覆うボックス領域を設定する。ロボット本体の動作を開始させる前に各キューブの評価を全て「危険」に設定しておき、ロボット本体が動作することでボックス領域の内部に全体が含まれたキューブについては(S5:YES)評価を「安全」に変更する(S6)。
(もっと読む)
241 - 250 / 1,155
[ Back to top ]