
株式会社デンソーウェーブにより出願された特許
271 - 280 / 1,155
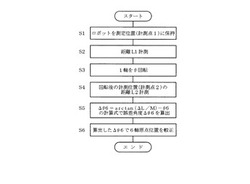
6軸ロボットの6軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの7軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて6軸の原点位置を適切に較正できる6軸ロボットの6軸原点位置較正方法を提供する。
【解決手段】設置面に、上方に位置する測定対象物との距離を測定するレーザー計測器を設置し、6軸の軸心に測定板を取り付ける。そして、6軸ロボットの2軸を1軸の軸心に対して90度回転させ、4軸の軸心が1軸の軸心と平行となるように3軸を前記設置面の方向に回転させ、6軸の軸心が前記設置面と平行となるように5軸を回転させた姿勢を取らせた状態で、測定板の一端側が第1計測点となるように位置させると(S1)、レーザー計測器により第1計測点までの第1距離L1を測定する(S2)。次に1軸を回転させて、測定板の他端側が第2計測点となるように位置させ(S3)、レーザー計測器により第2計測点までの第2距離L2を測定すると(S4)、6軸の誤差角度Δθ6を(1)式で求め(S5)、誤差角度Δθ6を用いて6軸の原点位置を較正する(S6)。
(もっと読む)
光学式情報読取装置

【課題】意図しない情報コードを読み取ってしまうことを抑制しつつ、読み取り速度を速くすることができる光学式情報読取装置を提供する。
【解決手段】マーカ光Mが読み取り面Rに投射された状態で、有効画素の中央部に設定された一次取り込み範囲H1に含まれる画素から信号を取り込む(S2)。そして、中心マーカ光MCの位置と取り込んだ画素の中心とのずれ量だけ、二次取り込み範囲の中心位置を初期位置から補正する(S5)。その後の二次取り込みは、範囲マーカ光MEが示すサイズと略一致するサイズを有し、S5で補正した位置を中心位置とする二次取り込み範囲H2から信号を取り込む(S7)。そして、この二次取り込みで取り込んだ信号を用いてデコード処理を行う。
(もっと読む)
多関節ロボット
【課題】アクチュエータ間の配線の絡みを防止することで電気配線の設置の好適化を図り、その上でしかも多関節ロボットの小型化を実現する。
【解決手段】関節アクチュエータ10は、モータモジュール11と、このモータモジュール11に組み付けられる配線ユニット13とを備えている。モータモジュール11の軸方向両端にはそれぞれトップカバー12とエンドカバー14とが設けられており、これらトップカバー12とエンドカバー14とに配線ユニット13のコネクタ83,84がそれぞれ取り付けられている。配線ユニット13のFPCケーブル82はモータハウジング27の外周に周回させて設けられている。また、配線ユニット13はモータハウジング27を回転軸として回転する筒体73を備えており、筒体73にFPCケーブル82が固定されている。
(もっと読む)
ロボット教示装置
【課題】イネーブルスイッチを備えるロボット教示装置において、ロボットの動作に関する物理量の調整を効率的に行うことのできる技術を提供する。
【解決手段】ロボット教示装置300は、所定の操作可能範囲内における操作量が大きくなるにつれ、ロボットを停止状態、作動状態、停止状態の順に切り換えるイネーブルスイッチ316と、前記操作可能範囲内のロボットが作動状態となる区間におけるイネーブルスイッチ316の操作量を検出する検出部と、ロボットが作動状態にある場合に、前記検出された操作量に応じて、ロボットの動作に関する物理量を調整する制御部と、を備える。
(もっと読む)
ロボット
【課題】フラットケーブルを剥き出しで使用しても、他の物体へ干渉することなく、フラットケーブルが損傷しない構造を持つロボットの提供。
【解決手段】ロボット1を形成するアーム8、第1昇降部11および第2昇降部12は鉛直なR軸を中心に旋回可能に形成されている。また、第1昇降部11はアーム8に対して上下移動可能に接続され、さらに第2昇降部12は第1昇降部11に対して上下移動可能に連結されている。第2昇降部12にはワークに処置を施すツールを取り付け可能な回転軸用モータ30が取付けられており、回転軸用モータ30へ電力を供給するためのフラットケーブル32がアーム8から引き出されて回転軸用モータ30へと接続されている。フラットケーブル32のアーム8および第2昇降部12への取付部位の間は下方に垂れ下がっており、第1昇降部11および第2昇降部12がアーム8に対して最も下降した場合に、この垂れ下がり部45は第2昇降部12の下端46よりも上方に位置している。
(もっと読む)
物品管理システム、情報コード及び情報コード読取装置
【課題】スペースが限られた物品であっても情報コードを形成して当該物品を管理することができる物品管理システム、情報コード、情報コード読取装置を提供する。
【解決手段】物品管理システム1は、物品(基板R)に対して情報コードBを形成する情報コード形成装置60と、情報コード形成装置60によって物品に形成された情報コードBを読み取り可能な情報コード読取装置10とを備えている。そして、情報コード形成装置60によって形成される情報コードBは、略円形状の円形モジュールとスペースとが所定方向に沿って交互に配置されると共に、各円形モジュールのサイズが各円形モジュールの径によって表わされ、各スペースのサイズが、各スペースの両側に配される円形モジュールの間隔によって表わされている。
(もっと読む)
手荷物管理システム
【課題】手荷物の返却場所とタイミングを早く容易に視認し得る手荷物管理システムを提供する。
【解決手段】出発空港Pdに、座席番号および手荷物番号が記憶される出発地側サーバ11と、複数の航空手荷物Lが積載されるコンテナCのコンテナ番号をこれら各航空手荷物Lに付された手荷物番号とともに取得するためのSTUBマニフェスト12と、が設けられている。到着空港Paに、手荷物管理情報を生成する到着地側サーバ21と、コンテナCに積載された各航空手荷物Lを搬送台24に載せる前に当該コンテナCに付されたコンテナ番号を取得するための情報端末23と、手荷物管理情報と情報端末23により取得されたコンテナ番号とに基づいてコンテナCに積載された各航空手荷物Lに対応する座席番号が抽出されるとこのように抽出された座席番号を対応する座席に関連させて表示するディスプレイ25と、が設けられている。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
アンテナ
【課題】耐落下性が良好で、且つ、小型化も可能なアンテナを提供する。
【解決手段】アンテナエレメント30、給電基板10、誘電体ブロック20、メッキ部40を備え、メッキ部40と給電基板10とが非導電性の両面テープ50によって互いに接着されているパッチアンテナ1において、メッキ部40と給電基板10とを金属ワイヤ60により短絡する。非導電性の両面テープ50は導電性両面テープによりも高い粘着力を有するものが種々存在することから、高い粘着力の両面テープを選択することができる。よって、耐落下性が良好になる。加えて、給電基板10とメッキ部40とが短絡されていることにより、誘電体ブロック20によるアンテナ小型化効果が両面テープ50によって阻害される程度が小さくなるので、アンテナを小型化することもできる。
(もっと読む)
携帯型無線通信端末
【課題】アンテナから放射される電波出力を調整し得る構成を、部品点数の増大、装置構成の大型化、消費電力の増大を抑えて実現する。
【解決手段】携帯型無線通信端末1は、信号出力手段によって出力されるベースバンド信号のオフセット電圧を変化可能な電圧調整手段と、信号出力手段によって出力されるベースバンド信号の振幅を変化可能な振幅調整手段とを有する出力制御手段を備えている。そして、この出力制御手段は、電圧調整手段によってベースバンド信号のオフセット電圧を調整し、振幅調整手段によってベースバンド信号の振幅を調整することにより、アンテナ40から出力される電波のレベルを変化させている。
(もっと読む)
271 - 280 / 1,155
[ Back to top ]