
株式会社デンソーウェーブにより出願された特許
231 - 240 / 1,155
ロボットシステム
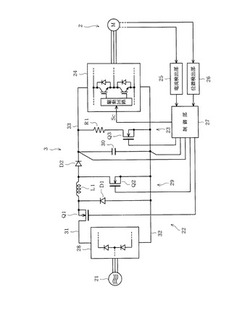
【課題】モータの駆動を制御する駆動制御手段の制御内容を変更することなく、ロボットの一連の動作時間を短縮しつつ、減速動作時にモータから生じる回生エネルギーを消費する際に発生する熱を低減する。
【解決手段】昇降圧回路29は、入力電圧を昇圧値まで昇圧して出力する昇圧動作と、入力電圧を降圧して出力する降圧動作のうち、いずれかの動作を実行する。制御部27は、加速動作の後に等速動作を経ることなく減速動作が実行される動作パターンに基づいてモータMが駆動される際、加速動作の開始時点から加速動作終盤の切替タイミングまでの昇圧期間に昇圧動作を実行するとともに、切替タイミングから次の加速動作の開始時点までの降圧期間に降圧動作を実行するように昇降圧回路29の動作を制御する。制御部27は、演算により切替タイミングを求めることで昇圧期間の長さを決定する。
(もっと読む)
カードリーダユニット

【課題】カード読取装置の誤取付けを気付かせるようにする。
【解決手段】制御情報入力用基板26は、正規向きで配置されたカード読取装置25のメイン制御基板接続用コネクタ25dに対して、これを覆わないように配置され、この制御情報入力用基板26においてカード読取装置25に近い部分には、カード読取装置25が非正規向きで配置された状態ではメイン制御基板接続用コネクタ25dの少なくとも一部を覆う形態の突片部26Tを形成した。
(もっと読む)
ロボットの制御装置
【課題】ロボットをより高速で動作させるための制御パターンを取得する制御装置において、その実用性を向上させる。
【解決手段】制御装置20は、ロボットのアームを第1姿勢と第2姿勢との間で駆動して、各サーボモータ31において速度、加速度、及び供給される電流の各連続値を検出する。各モータ31において所定の期間毎に、上限値に対する電流値の比率である電流比を算出する。所定の期間毎に、各モータ31の電流比のうち最大電流比を選択し、この最大電流比の逆数に基づいて各モータ31の修正加速度を算出する。修正加速度と各モータ31の速度とに基づいて、各モータ31における修正速度を繰り返し算出する。修正速度と各モータ31の回転位置とに基づいて、各モータ31における修正回転位置を繰り返し算出する。第1姿勢側から算出された修正速度と、第2姿勢側から算出された修正速度とに基づいて、修正後の速度変動パターンを設定する。
(もっと読む)
全館空調システム
【課題】少ない種類のセンサで、しかも設置作業者やユーザーの設定・調整の負担を軽減しつつ、快適性を満足できるようにする。
【解決手段】全館空調システムは、温度設定スイッチ24、部屋内空気温度センサ26、ユーザーによって操作され当該ユーザーが所望する涼しさ増加度合いや暖かさ増加度合いの体感度数nを入力する体感度数入力スイッチ27、部屋内の輻射熱源の表面温度を検出する表面温度センサ28、制御装置13を備え、制御装置13は前記体感度数入力スイッチ27が操作されたときに、目標温度Tt[℃]を
Tt=(Ts−α×Th/2)+(Ts−β×Tc/2) とする。
ただし、α=1−n/N β=1+n/N である。
(もっと読む)
ロボット設置構造
【課題】作業者の技量に関係なく、ロボットの設置作業を効率よく実施する。
【解決手段】架台は、平板状をなすステージ12を備えており、そのステージ12の上面側にロボット13が設置されている。ロボット13は、ステージ12上に載置された状態で、ステージ下面側から複数のネジ18により固定される。ステージ12には上下に貫通する貫通孔16が設けられている。ロボット底面部には、基準位置としてのネジ孔17が設けられているとともに、マーキングシート20が貼り付けられている。マーキングシート20には、そのネジ孔17に対する方向情報と同ネジ孔17までの離間距離情報とが付与されたマーキングが付されている。
(もっと読む)
無線タグシステム
【課題】無線タグから無線タグリーダに対してなされる通信確認処理をより適切な間隔で行うことができ、無線タグの省電力化をより効果的に図り得る無線タグシステムを提供する。
【解決手段】無線タグシステム1は、内蔵電池を備えた無線タグ50と、第1通信エリアAR1内で無線タグ50を読み取る無線タグリーダ10と、無線タグリーダ10によって構成される第1通信エリアAR1よりも広く且つ第1通信エリアAR1の周囲を含んだ第2通信エリアAR2内で無線タグ50と無線LAN通信を行うリーダ側基地局80aと備えている。そして、無線タグ50に設けられた無線タグ通信手段は、無線LAN通信手段とリーダ側基地局80aとの間の無線LAN通信の状態に応じて、無線タグリーダ10に対する通信確認処理の間隔を変更している。
(もっと読む)
ロボットのティーチングシステム
【課題】所定図形を撮像して取得される画像に基づいてロボットを制御するティーチングシステムにおいて、ロボット周囲の設備から制約を受ける場合であっても、ティーチング棒により適切にロボットを誘導できるようにする。
【解決手段】ロボットのティーチングシステムは、複数の関節を有するアーム12を動作させる多関節型ロボット10と、ロボット10の誘導に用いられるティーチング棒60と、ティーチング棒60に設けられキャリブレーションボードCの映像を表示する表示器と、アーム12に設けられ対象を撮像して画像を取得するカメラ14と、を備える。ティーチングシステムは、ボードCの映像がカメラ14により所定の目標画像として取得されるようにアーム12の動作を追従制御するロボットコントローラ20と、ボードCの映像の大きさ及び向きの少なくとも一方を、表示器から離れた位置で変更可能とするティーチングペンダント30と、を備える。
(もっと読む)
携帯端末
【課題】外部装置とUSB通信が可能な携帯端末において、ノイズ等に起因する異常信号に対処しやすい構成を提供する。
【解決手段】携帯端末1は、USB通信端子41を介して外部装置とUSB通信を行う通信手段を備え、この通信手段は、USB通信端子41に接続されたUSB通信ライン42の状態がサスペンド指示状態となったか否かを判断するサスペンド指示状態判断手段と、サスペンド指示状態が検出された後にUSB通信ライン42がレジューム指示状態に変化したことを検出するレジューム指示状態検出手段と、レジューム指示状態への変化が検出されてからの経過時間を測定するタイマ50と、その経過時間が閾値に達するまでの間、レジューム指示状態の解除を監視する解除監視手段と、経過時間が閾値に達する前にレジューム指示状態の解除が検出された場合に再接続処理を行う再接続手段とを備えている。
(もっと読む)
ロボットの回転規制装置
【課題】狭いスペースに配設することができ、しかも、回転リンクの回転動作範囲を360度を超える角度に規制することも可能なロボットの回転規制装置を提供する。
【解決手段】手首アームのフレームの先端開口部を塞ぐ蓋部材に環状の収納空間30を形成し、この収納空間30内に両端を径小側内面壁30aと径大側内面壁30bに連結したフレキシブルバンド29を収容すると共に、フランジ(回転リンク)と一体に回転する掛合ピン41を挿入する。フランジが許容角度範囲を超えて回転しようとすると、掛合ピン41に引っ掛けられて径小側内面壁30aに巻き付けられるフレキシブルバンド29が伸び切ってフランジの回転を強制的に停止させる。
(もっと読む)
監視システム及び無線タグ
【課題】監視対象者が所定の静止状態となったことをより早く且つより正確に検出し得る構成を提供する。
【解決手段】監視システム1は、無線タグ50を無線タグリーダ10によって読み取ることで監視するものである。無線タグ50は、当該無線タグ50の静止状態を検出する静止状態検出手段と、静止状態検出手段によって検出される静止状態の継続時間を検出する静止継続時間検出手段と、静止継続時間検出手段によって検出された継続時間が所定時間を経過したか否かを判断する判断手段と、判断手段によって継続時間が所定時間を経過したと判断された場合に報知信号を出力する報知信号出力手段とを有している。
(もっと読む)
231 - 240 / 1,155
[ Back to top ]